



直线y=mx+b可用极坐标表示为
r=xcosθ+ysinθ (4-54)
式中,(r,θ)定义了一个从原点到线上最近点的向量(见图4-39a),这个向量与该直线垂直。
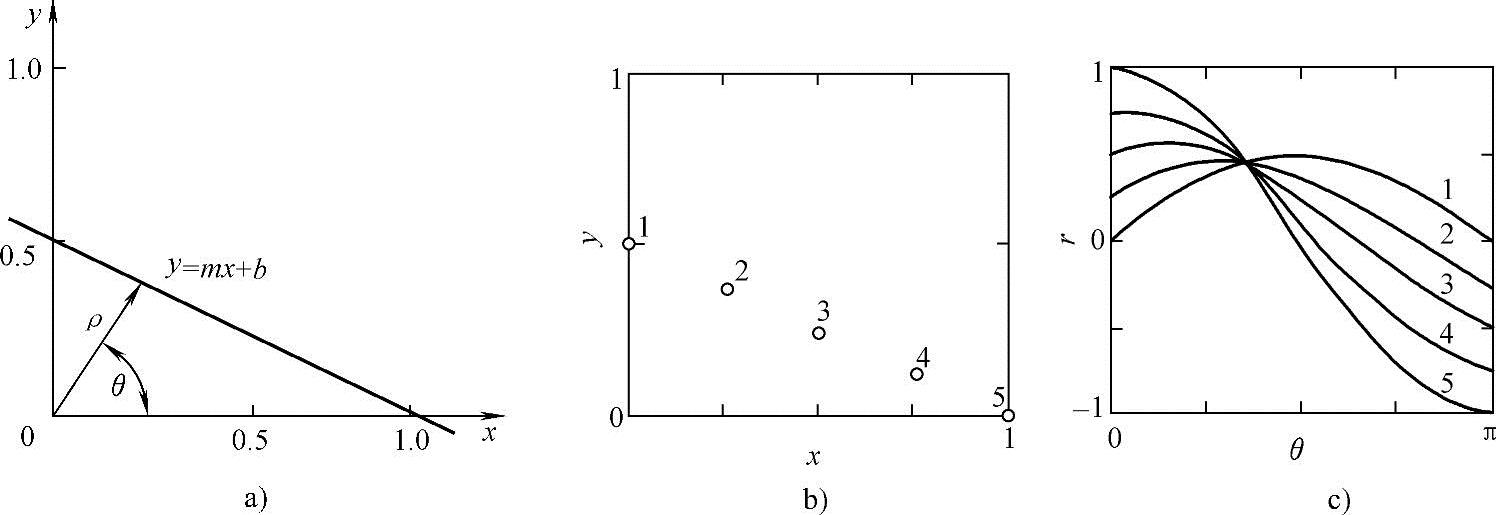
图4-39 Hough变换
a)一条直线的极坐标表示 b)x、y平面 c)r、θ平面
考虑一个以参数r和θ定义的二维空间。x、y平面的任意一直线定义了该空间的一个点。因此,x、y平面的任意一直线的Hough变换是r、θ空间的一个点。
现在考虑x、y平面的一个特定的点(x1,y1)。过该点的直线可以有很多条,每一条都对应了r、θ空间中的一个点。然而这些点必须是满足x1和y1作为常量时的等式。因此在参数空间中,与x、y空间中所有这些直线对应的点的轨迹是一条正弦曲线,而x、y平面上的任一点(见图4-39b)对应了r、θ空间的一条正弦曲线(见图4-39c)。
如果有一组位于由参数r0和θ0决定的直线上的边缘点,则每个边缘点对应了r、θ空间的一条正弦曲线。所有这些曲线必交于点(r0,θ0),因为这是它们共享的一条直线的参数。
为了找出这些点所构成的直线段,可以将r、θ空间量化成许多小格。根据每一个(x0,y0)点代入θ的量化值,算出各个r,所得的值(经量化)落在某个小格内,便使该小格的计数累加器加1,当全部(x,y)点变换后,对小格进行检验,有大的计数值的小格对应于共线点,其(r,θ)可用作直线拟合参数。有小的计数值的各小格一般反映非共线点,应丢弃不用。
可以看出,如果r和θ量化得过粗,则参数空间的凝聚效果较差,找不出直线的准确的r和θ值;反过来,如果r、θ量化得过细,那么计算量将增大,需要兼顾这两个方面,取合适的量化值。
若图像中各点是边沿元,而且梯度方向已求出,在寻找有无直线边沿时,可在其梯度方向内把θ精细量化,其他θ角则粗量化,这样在不增加总的量化小格数的情况下,可以提高检测直线边沿的方向角的精度。
对于圆,可写出其方程为
(x-a)2+(y-b)2=R2 (4-55)(https://www.xing528.com)
这时参数空间增加到三维,由a、b、R组成。如果仍然像找直线那样直接计算,那么计算量和存储空间部将显著增大。
如果已知有圆的边沿元,而且边沿元为已知,那么可以简化为二维的问题。因为把上式对x取导数,有

这表示参数a和b不独立,利用这个关系以后,解上式只需用两个参数(例如b和R)组成参数空间,计算量减少了很多。
在人为景物中圆形物体经常出现,经过透视成像后由圆变成椭圆。寻找椭圆的算法可以仿照寻找元的算法来进行。
设椭圆方程为

取导数有

可以看到这里有三个独立参数。如果椭圆主轴不平行于坐标轴,则可写为
Ax2+Bxy+Cy2+Dx+Ey+1=0 (4-59)
在利用椭圆边沿的方向信息后,在映射空间的独立参数仍有四个之多,为了简化求椭圆的计算,还需要其他的特殊解法,这里就不多介绍了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。