



在介绍图像平滑(去噪声)和锐化之前,首先介绍一下模板操作。
模板操作是数字图像处理中常用的运算方法,图像的平滑、锐化以及后面将要介绍的细化、边缘检测都要用到模板操作。
对于最简单的局部平滑算法,即非加权领域平均,它均等地对待领域中的每个像素。设图像中某像素灰度值为f(x,y),它的领域S为N×N,点集的总数为M,则平滑后这点的灰度值为

对于这样的操作,可以用模板操作来表示。为了叙述方便,设N=3,则可以用如下的表示方法来表示此操作:

这种表示方法有点像矩阵,称其为模板(Template)。中间的黑点表示该元素为中心元素,即该元素是要进行处理的元素。如果模板是

则该操作应该描述为:将原图中一个像素的灰度值和它右下邻近的8个像素的灰度值相加,然后将求得的平均值(除以9)作为新图中该像素的灰度值。
如果模板为 ,则表示将自身灰度值的2倍加下边的元素灰度值作为新值,而
,则表示将自身灰度值的2倍加下边的元素灰度值作为新值,而 则表示将自身灰度值加上边元素灰度值的2倍作为新灰度值。
则表示将自身灰度值加上边元素灰度值的2倍作为新灰度值。
通常模板不允许移出边界,所以处理后的新图像会比原图小。例如:当模板是 ,原图灰度值矩阵是
,原图灰度值矩阵是 时,经过模板操作后的图像为
时,经过模板操作后的图像为 ,“—”表示边界上无法进行模板操作的点,一般的做法是复制原图的灰度值,不再进行任何其他的处理。
,“—”表示边界上无法进行模板操作的点,一般的做法是复制原图的灰度值,不再进行任何其他的处理。
模板操作实现了一种邻域运算(Neighborhood Operation),即某个像素点的结果不仅和本像素灰度有关,而且和领域点的值有关。模板运算在数学中的描述是卷积(或互相关)运算,在这里就不再介绍了,有兴趣的读者可以自行查看相应的数学书籍。
模板运算在图像处理中经常要用到,但是当图像很大时,运算量是非常可观的,也非常耗时。以模板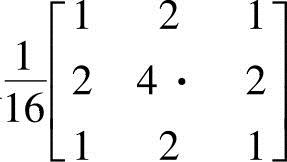 运算为例,每个像素完成一次模板操作要用9次乘法、8次加法和1次除法。对于一幅N×N(宽度×高度)的图像,就是要进行9(N-2)2次乘法、8(N-2)2次加法和(N-2)2次除法操作,算法复杂度为O(N2),这对于大图像来说,是非常可怕的,所以常用的模板并不大,如3×3、4×4。有很多专用的图像处理系统,用硬件来完成模板运算,大大提高了速度。
运算为例,每个像素完成一次模板操作要用9次乘法、8次加法和1次除法。对于一幅N×N(宽度×高度)的图像,就是要进行9(N-2)2次乘法、8(N-2)2次加法和(N-2)2次除法操作,算法复杂度为O(N2),这对于大图像来说,是非常可怕的,所以常用的模板并不大,如3×3、4×4。有很多专用的图像处理系统,用硬件来完成模板运算,大大提高了速度。
另外,可以设法将二维模板运算转换成一维模板运算,这对速度的提高也是有益的。例如,上面的例子可以分解成一个水平模板和一个竖直模板,即

这样,改进后将要进行的是6(N-2)(N-1)次乘法,4(N-2)(N-1)次加法和(N-2)2次除法操作,减少了不少次乘法和加法运算。
下面来具体验证一下该分解算法的可行性,设图像为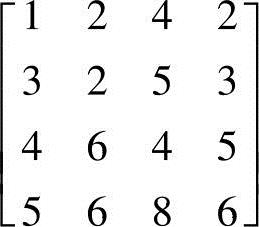 ,直接经过模板
,直接经过模板
 处理后变为
处理后变为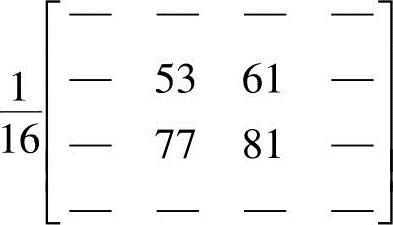 。但是如果采用分解后的模板来处理,结果为
。但是如果采用分解后的模板来处理,结果为

可以发现,两种计算方法得出的结果是完全相同的。
1.图像的平滑
图像在生成和传输过程中常受到各种噪声的干扰和影响,使图像质量下降。为了抑制噪声以改善图像质量,必须对图像进行平滑处理,这可在空域或频域中进行。在平滑噪声时应尽量不损害图像中边沿和各种细节。
对于滤除图像中的噪声,人们已经提出了很多方法。通常,将数字图像的平滑技术分化为两类:一类是全局处理,即对噪声图像的整体或大的块进行校正,以得到平滑的图像,但对大多数图像而言,人们不知道或不可能用简单的随机过程精确地描述统计模型,而且这些技术计算量也是相当大的;另一类平滑技术是对噪声图像使用局部算子,当对某一像素进行平滑处理时,仅对它的局部小领域的一些像素加以运算,其优点是计算效率高,而且可以对多个像素并行处理,因此可实现实时或准实时处理。
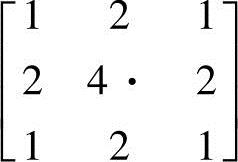
平滑模板的思想是通过一点和周围几个点的运算(通常为平均运算)来去除突然变化的点,从而滤掉一定的噪声,但图像有一定程度的模糊。而减少图像模糊代价是图像平滑研究的主要问题之一。这主要取决于噪声本身的特性。一般情况下,通过选择不同的模板来消除不同的噪声。常用的模板有

其中,最后一个模板又常称为高斯模板,它是通过采样二维高斯函数得到的。
2.图像的锐化
图像锐化处理的目的是使模糊的图像变得更加清晰起来。通常针对引起图像模糊的原因而进行相应的锐化操作,属于图像复原的内容,在这里只是介绍一般的去模糊算法。
图像的模糊实质上就是图像受到平均或积分运算造成的,因此可以对图像进行逆运算如微分运算来使图像清晰化。从频谱角度来分析,图像模糊的实质是其高频分量被衰减,因而可以通过高通滤波操作来清晰图像。但要注意,能够迸行锐化处理的图像必须有较高的信噪比,否则锐化后图像信噪比反而更低,从而使噪声的增加比信号的增加还要多,因此一般是先去除或减轻噪声后再进行锐化处理。
图像锐化一般有两种方法:一种是微分法;另外一种是高通滤波法。后者的工作原理和低通滤波相似,这里就不再详细介绍了。下面主要介绍一下两种常用的微分锐化方法:梯度锐化和拉普拉斯锐化。对于高通滤波法,只给出几种常用的高通滤波器。
(1)梯度锐化 图像的模糊相当于图像被平均或被积分。为实现图像的锐化,必须用它的反运算“微分”,来加强高频分量的作用,从而使图像轮廓清晰。由于模糊图像的特征(如边沿的走向等)各不相同,要进行锐化,应该采用各向同性、具有旋转不变的线性微分算子。
图像处理中最常用的微分方法是求梯度。图像f(x,y)所在的梯度是一个向量,定义为

梯度有两个重要性质:
1)梯度的方向在函数f(x,y)最大变化率方向上;
2)梯度的幅度用GM[f(x,y)]表示,其值为

点(x,y)梯度的幅度为梯度的模,即
GM(x,y)={[f(x,y)-f(x+1),y]2+[f(x,y)-f(x,y+1)]2}1/2 (4-28)
为了运算简便,可以简化为
GM(x,y)≈f(x,y)-f(x+1),y+f(x,y)-f(x,y+1)(4-29)
或利用Roberts梯度算子
GM(x,y)={[f(x,y)-f(x+1,y+1)]2+[f(x+1,y)-f(x,y+1)]2}1/2 (4-30)
Roberts算子也可以简化为
GM(x,y)=f(x,y)-f(x+1,y+1)+f(x+1,y)-f(x,y+1) (4-31)
梯度算子一旦算出后,就可以根据不同的需要生成不同的梯度增强图像。
此方法的缺点是增强图像仅仅显示灰度变换比较陡峭的边沿轮廓,而灰度变化比较平缓或者比较均匀的地方则呈现黑色。
人们又提出了一些改进的方法,例如:

式中,T是一个非负的阈值。适当地选取T,即可使明显的边沿轮廓得到突出,并且不会破坏原来灰度变换比较平缓的背景。
还有一些其他方法,例如将梯度幅度大于阈值的设置为某个指定的灰度或者梯度幅度,梯度幅度小于阈值的像素则设置为某个指定灰度或者梯度幅度等,这里就不一一介绍了,读者可以参考数字图像处理文献。(https://www.xing528.com)
(2)拉普拉斯锐化 拉普拉斯锐化运算也是偏导数运算的线性组合,而且是一种各向同性(旋转不变性)的线性运算。设 为拉普拉斯算子,则
为拉普拉斯算子,则

对于离散数字图像f(i,j),其一阶偏导数为

其二阶偏导数为

所以,拉普拉斯算子 为
为

对于扩散现象引起的图像模糊,可以用下式来进行锐化:

图3-1 FACS把脸部运动分解为肌肉运动
式中,kτ是与扩散效应有关的系数。该系数取值要合理,如果kτ过大,图像轮廓边缘会产生过冲;反之如果kτ过小,锐化效果就不明显。
如果令kτ=1,则变换公式为
g(i,j)=5f(i,j)-f(i-1,j)-f(i+1,j)-f(i,j+1)-f(i,j-1) (4-38)
用模板表示如下:

这样拉普拉斯锐化运算完全可以转换成模板运算。其实常用的拉普拉斯锐化模板还有另外一种形式:

拉普拉斯算子有两个缺点:一是边沿的方向被丢失;另一个是拉普拉斯算子为二阶差分,双倍加强了图中的噪声影响。优点是各向同性,即旋转不变。
(3)高通滤波器 由于图像中的边缘及急剧变化部分与图像高频分量有关,因此利用高通滤波器衰减图像信号中的低频部分,能相对增强图像高频部分,从而实现图像锐化的目的。常用的高通滤波器有理想高通滤波器、巴特沃夫高通滤波器、指数高通滤波器和梯形高通滤波器。下面将分别给出各种高通滤波器的转移函数。
1)理想高通滤波器 理想二维高通滤波器的传递函数如下:

式中,D0是从频率平面原点算起的截止频率(或截止距离)。D(μ,ν)为

理想高通滤波器传递函数的径向剖面如图4-9所示。
理想高通滤波器和理想低通滤波器相反,它正好将以D0为半径的圆内的频率成分(低频部分)衰减掉,而对圆外的频率成分(高频部分)则可以无损通过。
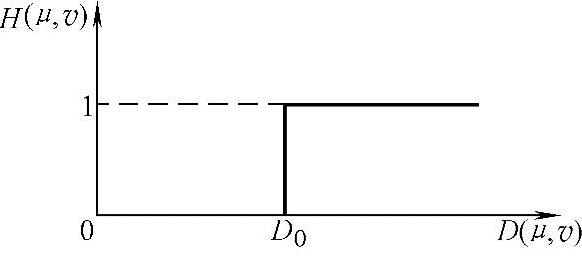
图4-9 理想高通滤波器传递函数径向剖面
2)巴特沃夫高通滤波器 截止频率为D0的n阶巴特沃夫高通滤波器的传递函数如下所示:

式中,D(μ,ν)仍然为 。
。
巴特沃夫高通滤波器传递函数径向剖面如图4-10所示。
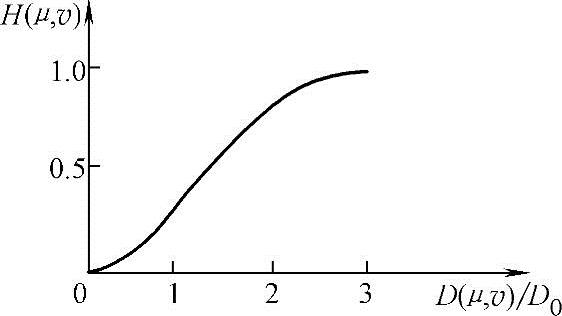
图4-10 巴特沃夫高通滤波 器传递函数径向剖面
和低通滤波器类似,定义H(μ,ν)下降到其最大值一半处的D(μ,ν)为截止频率点D0。一般情况下,高通滤波器的截止频率选择使H(μ,ν)下降到其最大值的 处,满足该条件的传递函数可以修改为
处,满足该条件的传递函数可以修改为

3)指数高通滤波器 截止频率为D0的指数高通滤波器的传递函数如下所示:

式中,D0为截止频率; 。参数n控制着H(μ,ν)的增长率。指数高通滤波器的传递函数径向剖面如图4-11所示。
。参数n控制着H(μ,ν)的增长率。指数高通滤波器的传递函数径向剖面如图4-11所示。
当D(μ,ν)=D0时,H(μ,ν)=1/e,如果仍然把截止频率定在H(μ,ν)最大值的 处,则传递函数可以修改为如下形式:
处,则传递函数可以修改为如下形式:

4)梯形高通滤波器 梯形高通滤波器的传递函数可以用下式表示:
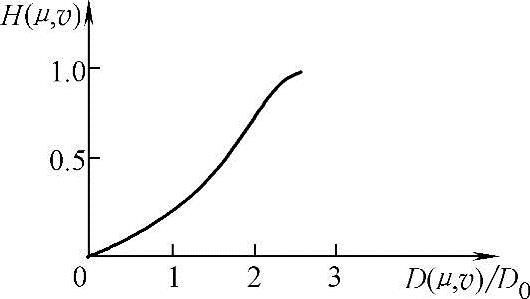
图4-11 指数高通滤波器传递函数径向剖面
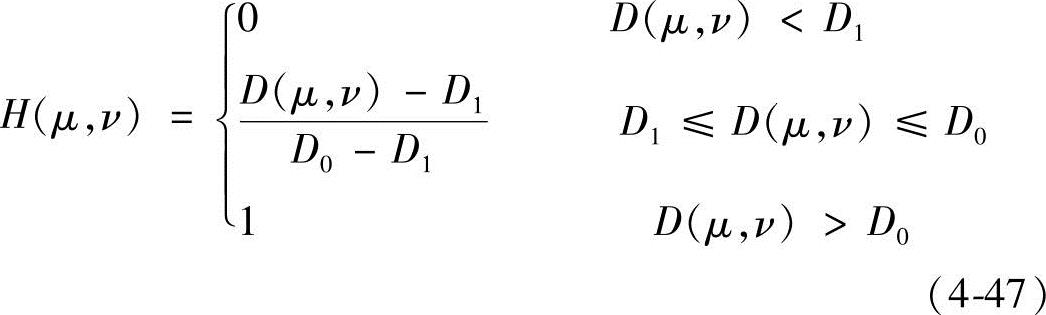
同样,式中 。D0和D1为指定值,并且D0>D1,定义截止频率为D0,D1是任意选的,只要满足D0>D1即可。梯形高通滤波器的传递函数径向剖面如图4-12所示。
。D0和D1为指定值,并且D0>D1,定义截止频率为D0,D1是任意选的,只要满足D0>D1即可。梯形高通滤波器的传递函数径向剖面如图4-12所示。
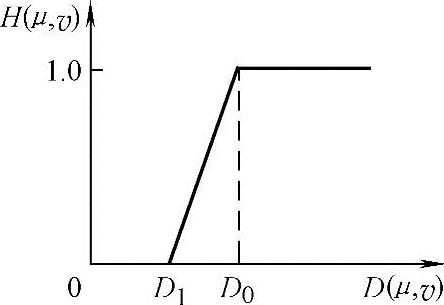
图4-12 梯度高通滤波器传递函数径向剖面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。