



【摘要】:表9.4-21 位置误差读入的控制数据存储器设定2.实际输出电流读入各轴伺服驱动器的输出电流可通过PMC的WINDR指令将其读入到PMC中,数据读入指令应设定的控制数据存储器参数及指令执行状态信息见表9.4-22。表9.4-23 驱动器转矩极限写出的控制数据存储器设定表9.4-24 驱动器预测负载读入的控制数据存储器设定
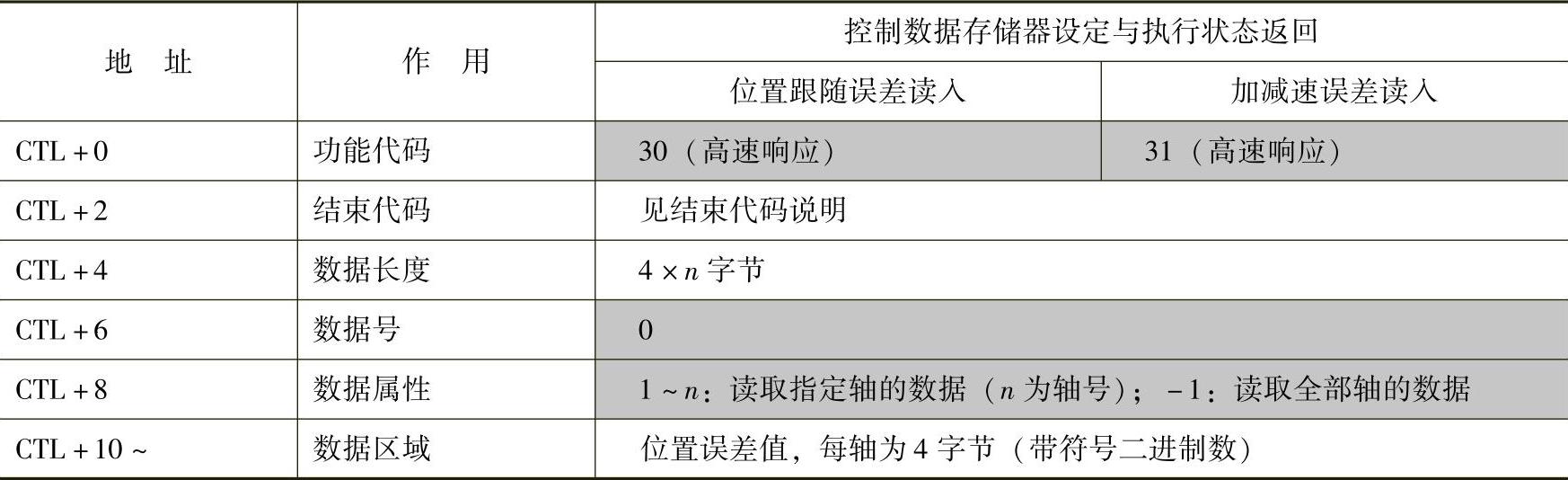
1.位置误差读入
坐标轴的位置跟随误差、加减速误差可通过WINDR指令读入到PMC中,其指令功能代码分别为30、31(高速响应指令),数据读入指令应设定的控制数据存储器参数及指令执行状态信息见表9.4-21。
表9.4-21 位置误差读入的控制数据存储器设定
2.实际输出电流读入
各轴伺服驱动器的输出电流可通过PMC的WINDR指令将其读入到PMC中,数据读入指令应设定的控制数据存储器参数及指令执行状态信息见表9.4-22。
表9.4-22 驱动器输出电流读入的控制数据存储器设定
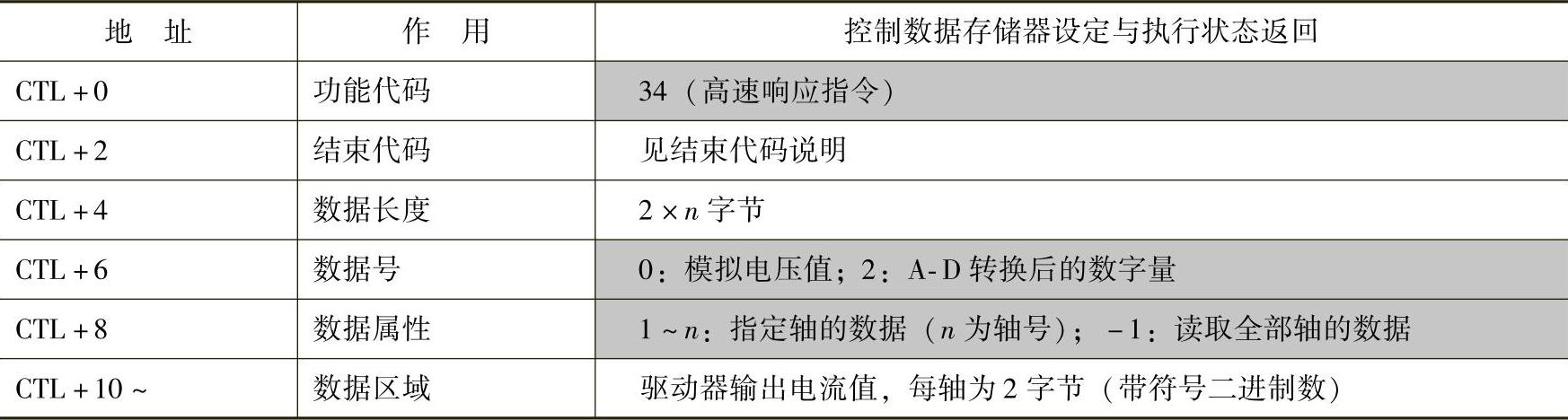
当数据号(CTL+6)设定为0时,所读取的驱动器输出电流为-10~10V模拟量经转换的数值0~255,其中:数值0对应于驱动器最大负向输出电流(-10V);数值255对应于最大正向输出电流(10V);数值128对应输出电流0(0V)。当数据号(CTL+6)设定为2时,所读取的驱动器输出电流为A-D转换后的数字量-6554~6554,最大输出电流所对应的数值为-6554(负向)和6554(正向)。(https://www.xing528.com)
3.驱动器转矩极限写出
各伺服驱动器的转矩极限设定值可以直接通过PMC的WINDW指令从PMC写出到对应的伺服驱动器中,数据写出指令应设定的控制数据存储器参数及指令执行状态信息见表9.4-23。
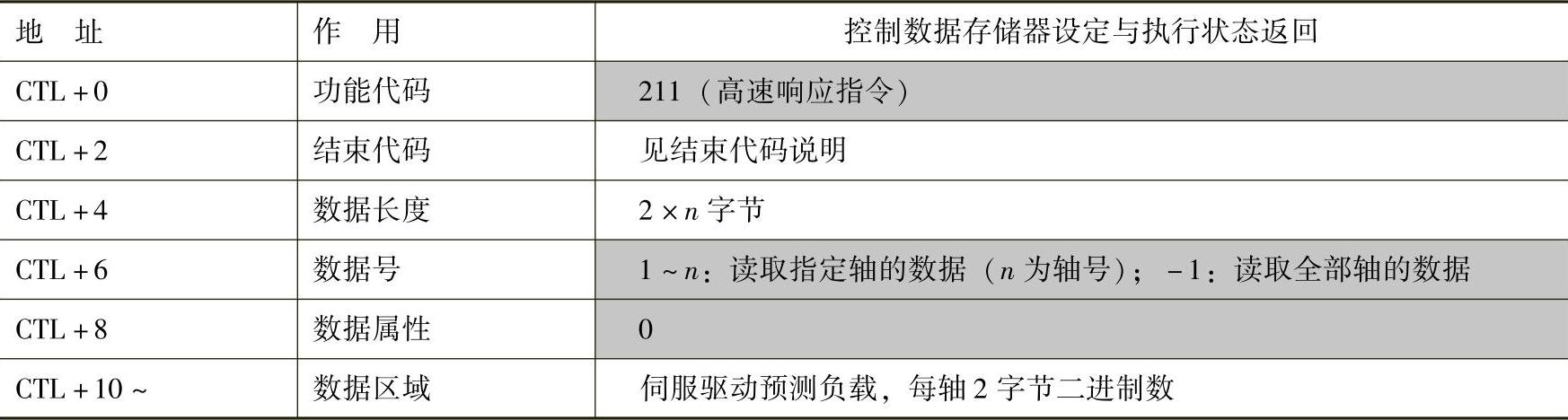
4.驱动器预测负载读入
各轴伺服驱动器的预测负载转矩可通过PMC的WINDR指令读入到PMC中,数据读入指令应设定的控制数据存储器参数及指令执行状态信息见表9.4-24。
表9.4-23 驱动器转矩极限写出的控制数据存储器设定
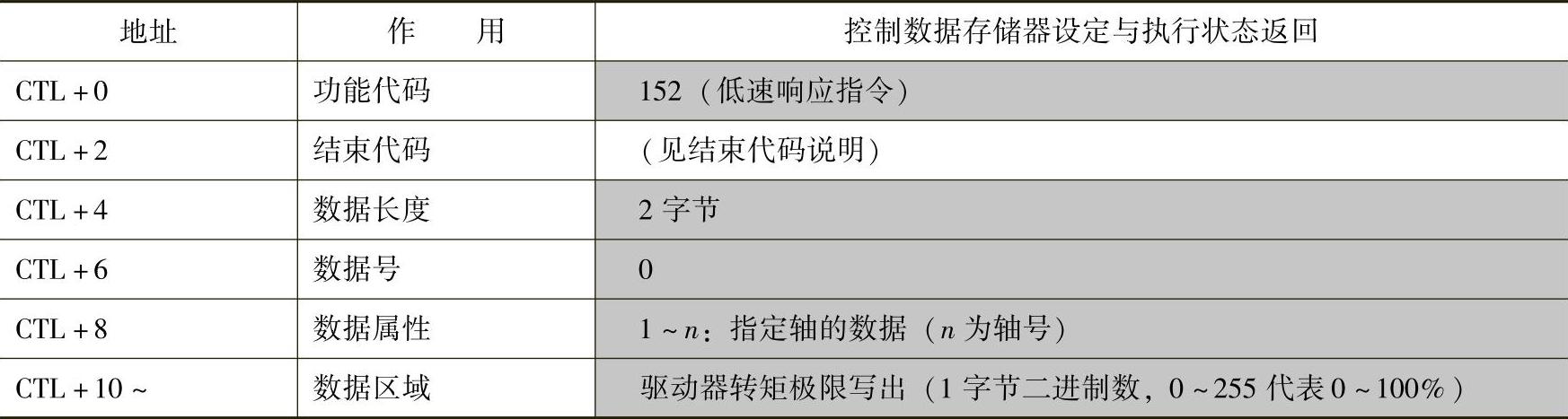
表9.4-24 驱动器预测负载读入的控制数据存储器设定
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。