



1.产品结构
βi系列驱动是FANUC公司生产的经济型驱动产品,多与FS-0iMateD配套使用。βi系列驱动有βiSV伺服驱动(又称SVM)和βiSVSP伺服/主轴一体型驱动(又称SVPM)两类产品。
βiSV伺服驱动器的规格较少,单轴驱动器目前只有βiSV4、βiSV20、βiSV40、βiSV80四种规格;双轴驱动器只有βiSV20/20、βiSV40/40两种规格。单轴驱动可选择200V输入标准型和400V输入HV型,以标准型为常用。
βiSV伺服驱动既可用于CNC坐标轴控制又可用于PMC辅助轴控制,前者需要选用带FSSB总线接口的驱动器(以下直接称βiSV驱动器),后者需要选用带I/O-Link总线接口的驱动器(以下称βi-I/O-Link驱动器)。由于目前FANUC暂时无独立的βi主轴驱动器产品,因此,βiSV驱动器多用于主轴采用变频器控制的普通数控机床,配套的CNC需要选择主轴模拟量输出功能。
βiSV驱动器的外形如图7.3-1a所示,驱动器有单轴和2轴2种结构,其电源、驱动模块合一,驱动器具有独立的整流、逆变与控制回路,可独立安装与使用。βiSV驱动器的连接端如图7.3-1b和图7.3-1c所示,小功率的βiSV4、βiSV20驱动器安装高度较小,电源进线、伺服电动机电枢线连接插头CZ7布置于模块的正面;大功率βiSV40、βiSV80及双轴驱动器βiSV20/20、βiSV40/40的安装高度较高,电源进线、伺服电动机电枢、制动电阻的连接插头CZ4、CZ5、CZ6布置于模块的下部。
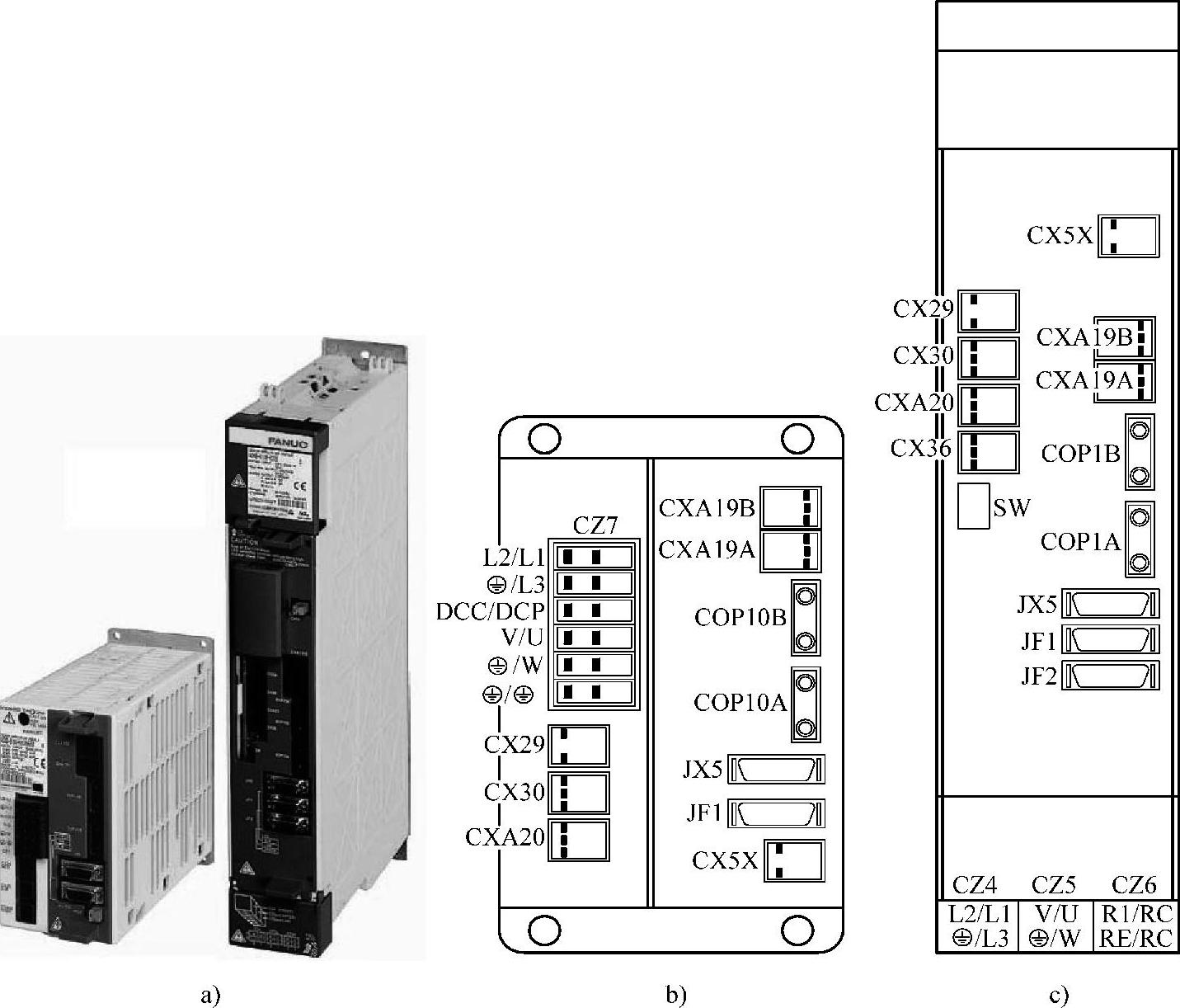
图7.3-1 βi伺服驱动器
a)外形 b)SV4/SV20 c)SV40/SV80
2.综合连接
βiSV驱动器的综合连接要求如图7.3-2所示,图中以βiSV4/SV20及βiSV40/SV80单轴驱动器为例。
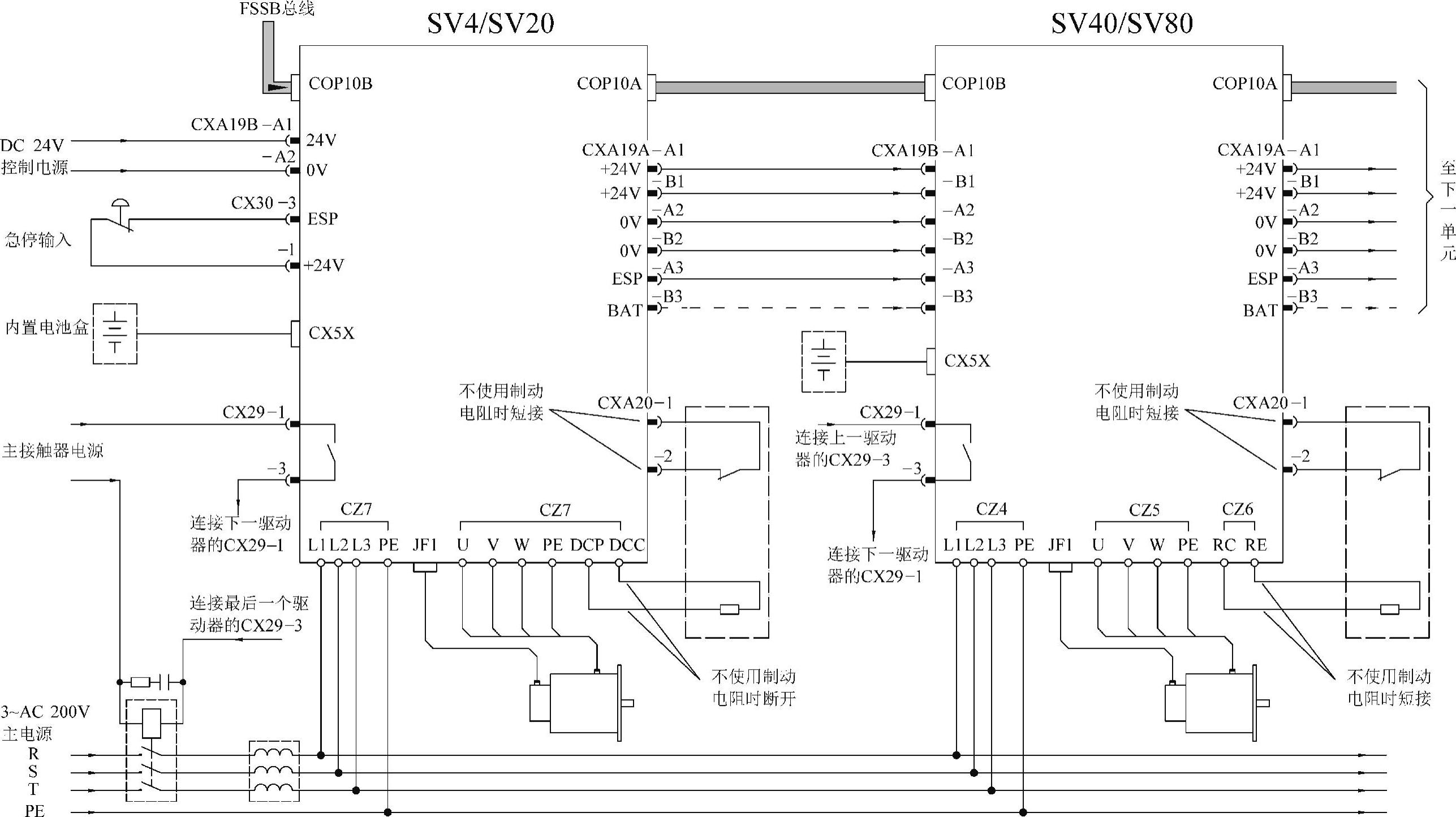
图7.3-2 βiSV伺服驱动器综合连接
各βiSV驱动器的主电源需要独立连接,但可共用短路保护断路器。驱动器的FSSB总线依次串联,其连接要求与αi伺服模块相同。
虽然,每一βiSV驱动器都有独立的控制电源、急停信号输入和主接触器控制输出连接器,但为了能对进行统一控制,外部控制电源和急停信号输入一般只连接到第1个驱动器的CXA19B及CX30上,其他驱动器通过控制总线CXA19A/CXA19B互连;而主接触器控制输出触点则以串联的形式连接,即第1个驱动器的CX29-1连接外部电路、CX29-3连接到第2个驱动器的CX29-1;第2个驱动器的CX29-3连接到第3个驱动器的CX29-1等,依次类推,最后一个驱动器的CX29-3和主接触器线圈或外部电路连接。
βiSV20/20、βiSV40/40双轴驱动器有第2轴的电动机电枢连接器CZ5M和反馈连接器JF2,可以连接第2轴伺服电动机;如需要,双轴驱动器可像αi电源模块一样,使用驱动器的报警输出(断电检测)信号。
3.主电路设计
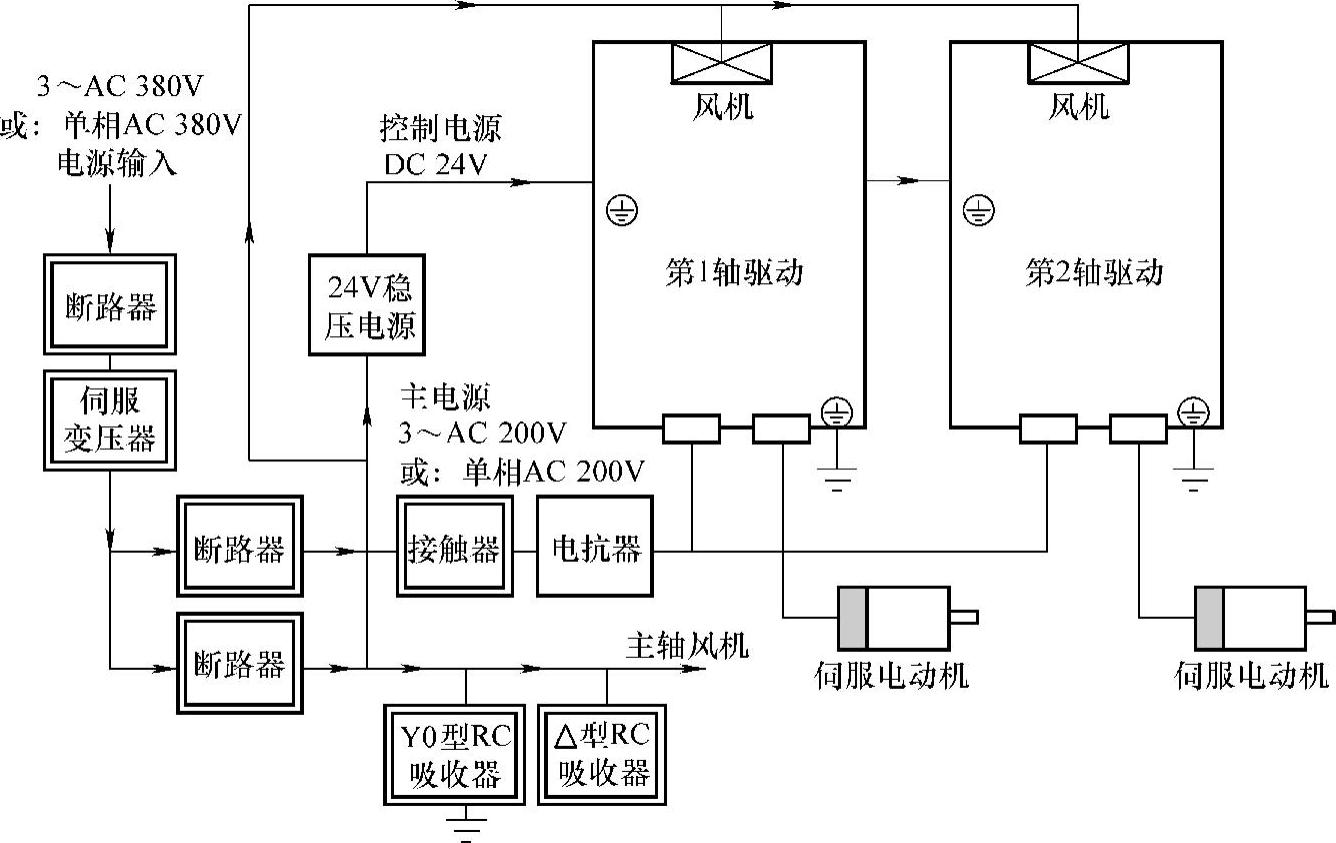
βiSV驱动器的主电路推荐使用图7.3-3所示的线路,小功率的βiSV4、βiSV20可以采用单相供电。采用HV型驱动器时,如果主电源电压为3~AC380/400V,则不需要安装图中的伺服变压器和进线断路器。驱动器的主电源输入要求、主电路设计要点与αi系列驱动器相同,可参见7.1节的说明。
 (https://www.xing528.com)
(https://www.xing528.com)
图7.3-3 βiSV驱动器主电路设计
βiSV伺服驱动器的控制电源为DC24V输入,允许变化范围为±10%(21.6~26.4V),单轴驱动器的输入容量为0.9A;电源的纹波、瞬时中断要求与CNC电源相同,可参见第6章6.1节说明。
βiSV伺服驱动器采用的是电阻放电能耗制动方式,故一般需要安装外部制动电阻单元,制动电阻单元一般直接安装在驱动器侧面。βiSV4/βiSV20驱动器的制动电阻与CZ7-3的DCP、DCC连接,过热触点与CXA20的1/2连接端连接;不使用外部制动电阻单元时,需要短接过热触点(CXA20-1/2脚)、断开电阻连接端DCP与DCC。βiSV40/βiSV80驱动器的外部制动电阻与RC、RE(CZ6-B1/B2脚)连接,过热触点连接到CXA20-1/2上;如不使用外部制动电阻单元,需要短接过热触点(CXA20-1/2)及电阻连接端RC与RI(CZ6-A1/A2)。
4.主电源连接
βiSV4/βiSV20驱动器的主电源的连接端为CZ7-1/2/3/4;βiSV40/βiSV80的主电源进线连接器为CZ4。标准型驱动器的主电源输入为3~AC200-240V,HV型驱动器为3~AC400-480V,驱动器对输入电源电压的要求与αi系列相同,可参见第6章6.1节说明。
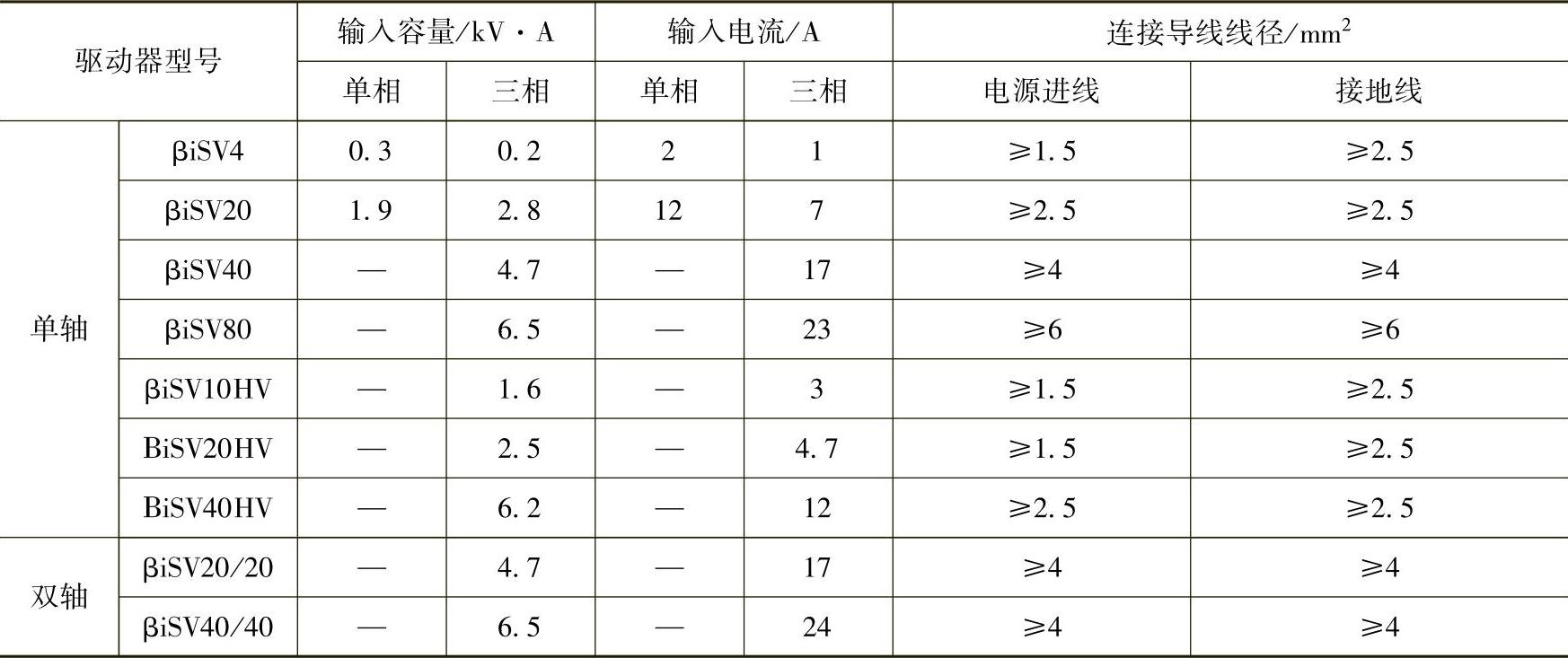
βiSV驱动器对主电源的输入容量、线径等方面的要求见表7.3-1。
表7.3-1 βiSV驱动器主电源连接要求
5.控制电路连接
1)控制总线。驱动器的控制总线CXA19B/CXA19A串联连接,第1个驱动器的CXA19B连接DC24V控制电源输入、CX30连接急停触点输入;后续驱动器的CXA19B与上驱动器的CXA19A连接,CXA19B/CXA19A的引脚与信号可参见图7.3-2。
2)主接触器控制触点。驱动器的主接触器控制输出触点一般以串联的形式控制,即第1个驱动器的CX29-1连接外部电路、CX29-3连接到第2个驱动器的CX29-1;第2个驱动器的CX29-3连接到第3个驱动器的CX29-1等,依次类推,最后一个驱动器的CX29-3和主接触器线圈或外部电路连接。触点的驱动能力为AC250V/2A,连接器引脚布置与信号可参见图7.3-2。
3)绝对编码器电池。驱动器使用绝对编码器时,电池连接可以采用两种方式:一是利用CXA19连接器的公用连接端BAT,连接一个公用电池盒;公共电池盒一般连接在最后一个驱动模块的CXA19A-B2/B3脚上;二是各驱动器使用独立的内置电池盒,电池盒连接器为CX5X,这时必须断开CXA19的公用连接端BAT(B3脚),防止电池短路。
4)测试接口。测试接口JX5用于生产厂家维修,可连接外部伺服调试设备。
5)报警输出。βiSV20/20、βiSV40/40双轴驱动器具有报警输出(Power failure detection output,FANUC中文说明书称断电检测输出)功能,其作用于αi系列驱动器电源模块的报警输出相同,报警信号为达林顿光耦输出,连接器为CX36,连接要求可参见后述的βiSVSP说明。报警输出的驱动能力为DC24V/50mA,驱动器正常工作时,CX36的2-3脚输出接通,驱动器故障时CX36-2、3断开。报警输出一般作为CNC的急停输入,串联至PMC的DI输入∗ESP上,以便快速控制电动机制动,减少垂直轴的重力自落。
6.电动机连接
βiSV4/βiSV20驱动器的伺服电动机电枢与CZ7连接器的U、V、W连接;βiSV4/βiSV20驱动器的伺服电动机电枢与CZ5连接器的U、V、W连接。
伺服电动机的编码器连接器为JF1,连接要求与αi系列驱动相同,并在不同的电动机上有所区别,可参见7.1节说明。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。