



对STATCOM变流器进行实时、适式地调控,可使其输出电压Vim的幅值和相位跟踪指令值,输出指令所要求的无功功率或通过输出适当的无功功率补偿线路电压降,稳定或支撑节点电压,达到控制目标,实现控制功能。
1.输出电压Vim的直接控制和间接控制
1)直接控制Vim:固定直流电压VD为指令值不变(即VD=VD∗),直接改变调制比M或单脉波脉宽θ调控Vim,这种调控Vim的策略称为直接调控Vim,几乎无时延,如图5-26d所示。
2)间接控制Vim:固定调制比M或固定脉宽θ恒定为指令值不变,靠改变直流电压VD调控Vim。调制比M或脉宽θ不变时,要改变VD,必须首先改变Vim滞后Vsm的相位差δ,使电网输入到STATCOM的有功功率Pi改变,从而改变电容C的充放电电流、逐渐改变VD,才能使Vim跟踪指令值Vimref。因此调控Vim有一定的延时,这种改变δ和有功功率Pi调节Vim的方法称为间接调控Vim,如图5-27所示。
STATCOM的主要控制目标也可以是图5-26a中的节点电压 ,而不是变流器交流端电压Vi,即通过改变输出的无功电流、无功功率调控系统母线节点电压
,而不是变流器交流端电压Vi,即通过改变输出的无功电流、无功功率调控系统母线节点电压 ,此外控制系统也可以设计成多目标功能的控制系统。
,此外控制系统也可以设计成多目标功能的控制系统。
2.内环控制和外环控制
STATCOM控制系统包括内环控制器和外环控制器两部分。内环控制器的主要功能是根据运行工况要求输出的无功指令值Qref,产生一个与电网电压 同步、并有一定相差的驱动信号,调控开关管的开通和关断。内环控制系统应是一个快速响应且电流可控(抑制过电流)的系统。而外环控制器的主要功能是为内环控制器提供能满足电网或用户对STATCOM控制功能所需的无功功率指令值Q∗。
同步、并有一定相差的驱动信号,调控开关管的开通和关断。内环控制系统应是一个快速响应且电流可控(抑制过电流)的系统。而外环控制器的主要功能是为内环控制器提供能满足电网或用户对STATCOM控制功能所需的无功功率指令值Q∗。
外环控制器的输入信号随电网或用户要求的不同而有所不同,通常可包括稳定电网节点电压和抑制电压闪变、阻尼系统功率振荡、提高系统暂态稳定极限和提高系统静态稳定极限等要求相关的信息指令。
(1)内环控制
图5-26示出了固定VD或随动控制VD为指令值(VD=VDref),按无功功率指令θ∗要求,直接调控Vim的内环控制方案原理图。图5-26b中,取电网电压V·sm矢量方向为d轴方向,则Vsd=Vsm、Vsq=0,Id就是有功电流,Iq为无功电流。R=0时由式(5-68)、式(5-69)可得

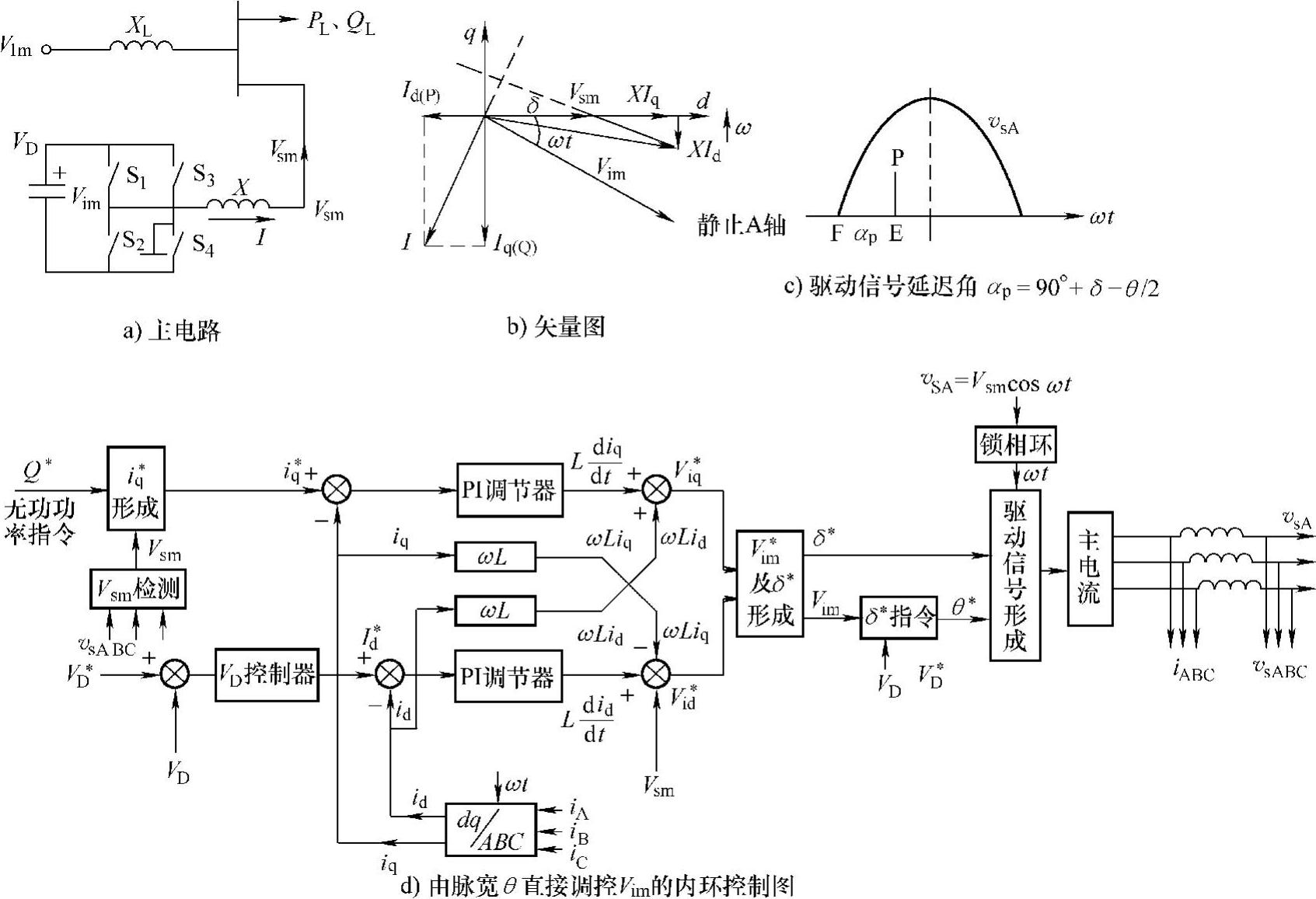
图5-26 改变脉宽、直接控制 的内环控制原理图
的内环控制原理图
图5-26中,实时检测的iA、iB、iC,并经过ABC/d,q变换后得到STATCOM实际输出的电流id、iq,这时id为有功电流Ip,iq为无功电流IQ。同时实时检测电网电压vsABC,由无功功率指令值Q∗经iq形成环节得到无功电流指令值iq∗。实时检测STATCOM直流侧电压VD并与其指令值VD∗作比较,其偏差ΔVD=VD∗-VD送入PI型直流电压VD控制器,其输出作为有功电流指令Id∗,用以补充STATCOM运行中的功耗及电容器充放电有功电流。将有功电流指令id∗及其实测值送入有功电流PI调节器,取有功电流调节器的输出作为Ldid/dt;将无功电流指令iq∗及其实测值iq送入无功电流PI调节器,取无功电流调节器的输出作为Ldiq/dt。按式(5-84)和式(5-85)即可构成图5-26d所示控制系统原理框图。其中STATCOM输出端电压指令值Vi∗d、Vi∗q为

Vi∗m幅值指令值为

由图5-26b可知, 滞后
滞后 的功角指令值为
的功角指令值为
δ∗=arctanVi∗q/Vi∗d (5-89)
已知变流器输出电压幅值和相位的指令值Vi∗m、δ∗,类似于第2章对三相逆变器采用的SPWM控制原理可得到三相桥六个开关器件的驱动信号。如果不采用SPWM控制,仅采用单脉波调宽控制变流器输出单脉波脉宽角θ,利用单脉波输出的基波电压幅值Vim与直流电压VD和脉宽角θ之间的函数关系,由参考电压幅值Vi∗m和直流电压VD可求得脉宽θ指令θ∗。由图5-25、图5-26中相关的说明,再按Vim滞后Vs∗m的相位角指令值δ∗及 的相位ωt以及脉宽指令值θ∗可得到开关管驱动信号P滞后VsA的相位角αp=90°+δ-θ/2。由于VsA相位为ωt,故驱动信号的相位为ωt+αp=ωt+90°+δ-θ/2,再由ωt+αp,对图5-26a中A相桥开关管S1~S4进行实时控制,即可使STATCOM输出的无功功率跟踪指令值Q∗,而且直流母线电压稳定为VD=VD∗。
的相位ωt以及脉宽指令值θ∗可得到开关管驱动信号P滞后VsA的相位角αp=90°+δ-θ/2。由于VsA相位为ωt,故驱动信号的相位为ωt+αp=ωt+90°+δ-θ/2,再由ωt+αp,对图5-26a中A相桥开关管S1~S4进行实时控制,即可使STATCOM输出的无功功率跟踪指令值Q∗,而且直流母线电压稳定为VD=VD∗。
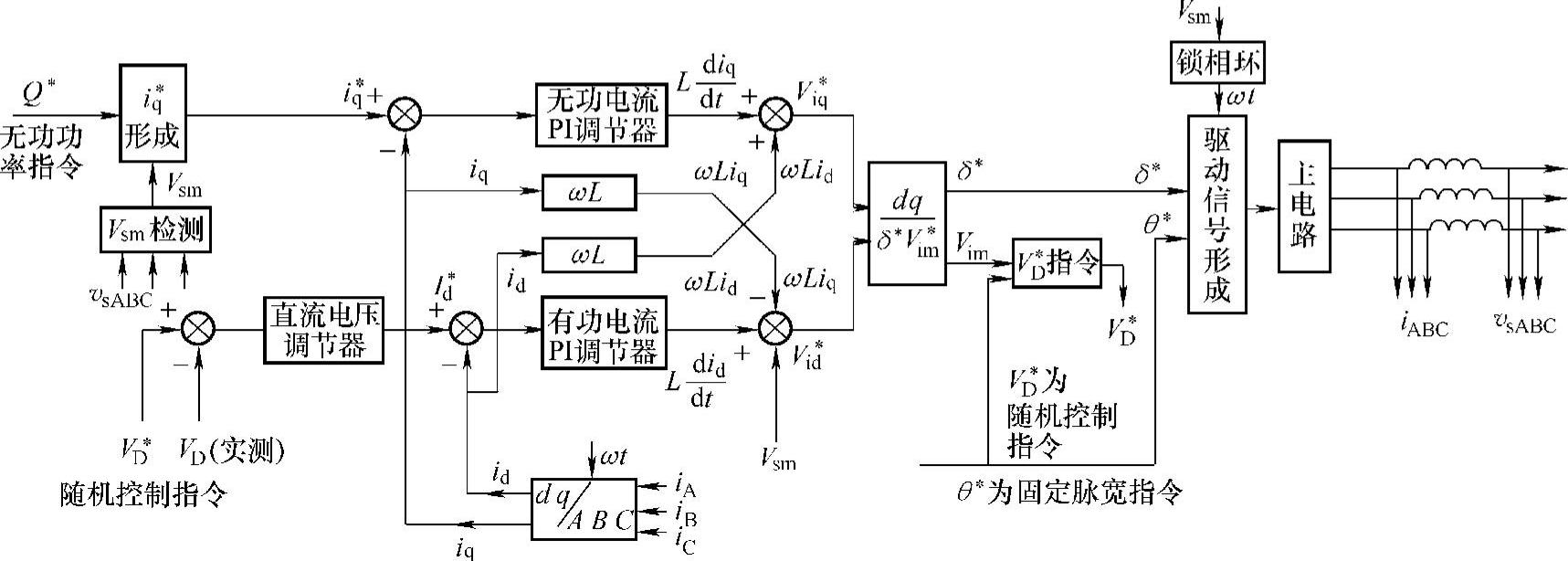
图5-27 固定脉宽θ、间接调控Vim的内环控制原理图
图5-27示出了采用d、q坐标系,固定脉宽θ(或固定调制比M),改变直流电容电压VD间接调控Vim的内环控制方案原理图。图5-27中的d、q坐标/极坐标变换环节dq/δVim按式(5-89)、式(5-88)将Vi∗d、Vi∗q变为δ∗、Vi∗m,再由STATCOM运行的固定脉宽角θ=θ∗、Vi∗m和式(5-59)得到直流电压随机控制指令值VD∗,即

将VD∗和实测的VD相比较后由直流电压调节器输出有功电流指令Id∗,使内环控制系统在脉宽θ不变的工况下,靠调控δ,改变VD间接调控Vim,使STATCOM输出指令值无功功率θ=θ∗。不难看出,这时STATCOM变流器是在输出电压脉波幅值(VD、Vim)调制(Pulse Amplitude Modulation,PAM)方式下运行,而图5-26d则是STATCOM变流器在脉冲宽度(θ)调制(Pulse Wide Modulation,PWM)方式下运行。
(2)外环控制
外环控制环节的功能是提供内环控制所需要的无功功率指令值Q∗。根据电力系统电网和用户的要求,通常需要STATCOM能输出所要求的无功功率,用以稳定电力系统节点电压、抑制电压闪变、阻尼电力系统功率振荡和提高电力系统暂态和静态稳定极限。(https://www.xing528.com)
图5-28示出外环控制原理的简单结构。首先检测无功电流Iq,通过电网指令电压的斜率控制给出电网电压基本指令值V2∗(V2∗=VR∗-KIq),再与其他各控制功能所需的控制量ΔVT、ΔVD、ΔVX、ΔVRes一起相加(Σ),组合形成总的电压指令V2∗Σ,将V2∗Σ与实际电网电压检测值V2相减得到电压偏差ΔV,再经电压调节器(AVR)输出QV,然后QV再与次同步振荡阻尼控制量ΔQs及过电压控制信号一起,最终形成STATCOM的无功功率指令值Q∗。然后再通过内环控制系统产生变流器开关器件的驱动信号,实现电力系统电网节点电压控制和其他要求的控制功能。如果电压检测环节能实现三相电压的快速检测,则可实现抑制电网冲击性感性无功负荷(如电弧炉)所引起的电压闪变,也能实现动态电压补偿控制(DVR)。
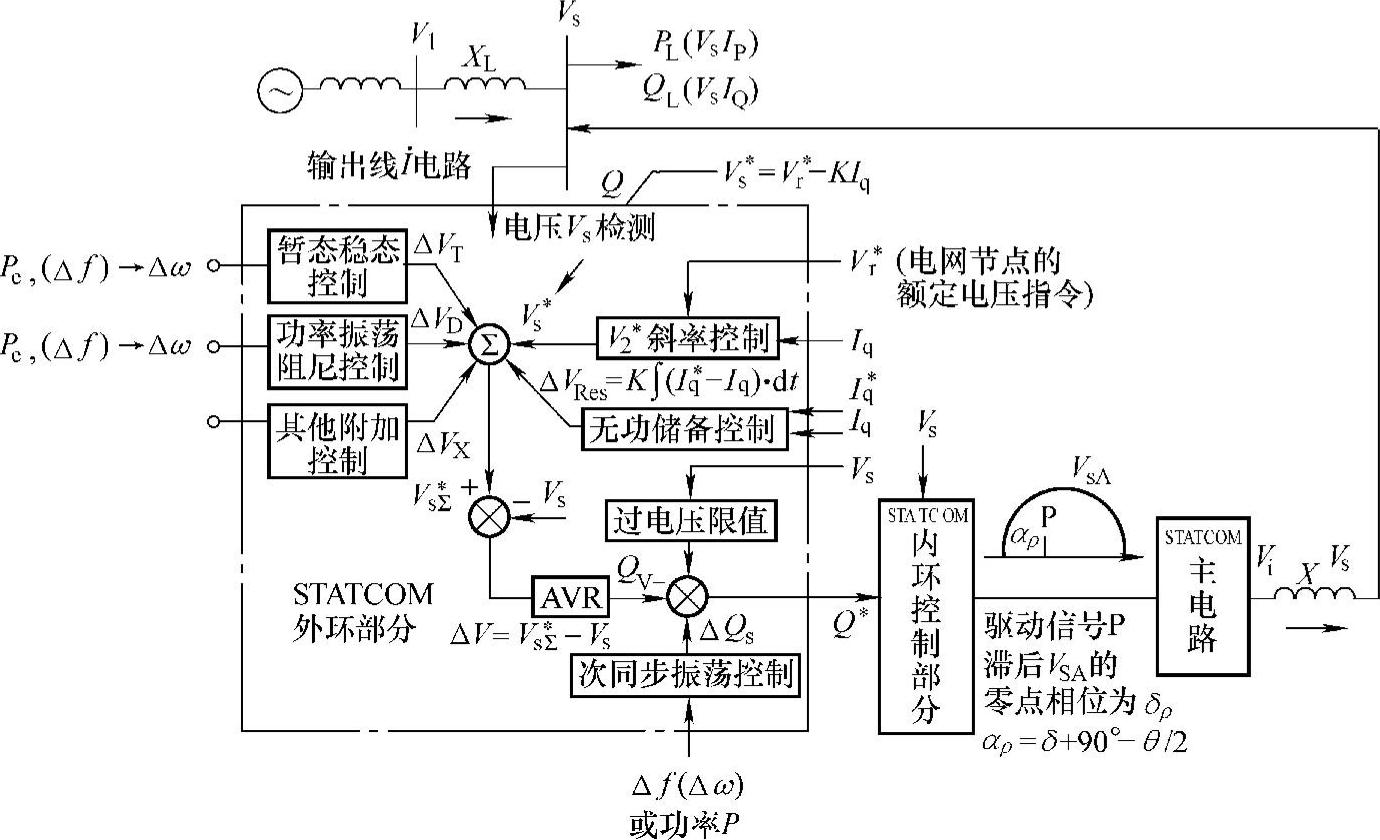
图5-28 STATCOM控制系统外环框图
图5-28中外环各种可能的控制功能简要介绍如下:
1)STATCOM对电网电压指令值V2∗的斜率控制。输电系统稳态运行时STATCOM若向电网输出感性无功功率Q,将使线路传输的感性无功功率减小量为Q,线路传输的感性无功电流减少IQ∝Q/V2,线路电压损耗减少ΔVC=XLIQ∝XLQ/V2(XL为传输线等效电抗见图5-28),ΔVC与XLQ乘积成正比。若要求补偿一定的节点电压ΔVC,XL越小则需STATCOM输出的无功Q越大。
调控STATCOM输出的无功功率可以稳定或支撑电网电压Vs,电网感性无功负荷增大,线路电压降增大,电网电压Vs下降。由于实际运行中允许电网电压Vs有少许的下降,并不影响负荷的正常运行,因此为了减少STATCOM(或SVC)的安装容量,实际运行中并不要求其输出的无功补偿量大到将Vs补偿到额定值VR而恒定不变。因此当感性负荷增大,要求STATCOM输出的感性无功补偿电流IL增大时,STATCOM输出感性无功支持电网电压的指令值Vs∗可减小一点,如图5-29中直线RW所示。当输出的感性无功IL增加达到变流器的设计容许值ILmax时,STATCOM就恒流(ILmax)运行,当电网感性无功负荷再增加使Vs再下降时,则只能任由电网电压从VsW下降,如VE所示,使STATCOM不因过载而损坏。反之,当负荷为容性无功,使Vs升高,要求STATCOM输出容性无功IC以补偿负荷的容性无功时,允许Vs的指令值Vs∗随补偿量的增大而上升一点,如图5-29中直线RH所示。当补偿量达到STATCOM设计容许值ICmax时,STATCOM恒流运行于I=ICmax,容性负荷再增大时,STATCOM输出补偿量不变,则只能任由电网电压上升,如图中直线HM所示。因此,指令值VS∗应取为
Vs∗=Vr∗-KIq (5-91)
式中,Iq为STATCOM输出的感性无功电流;K是指令电压VS∗随Iq而线性变化的斜率。
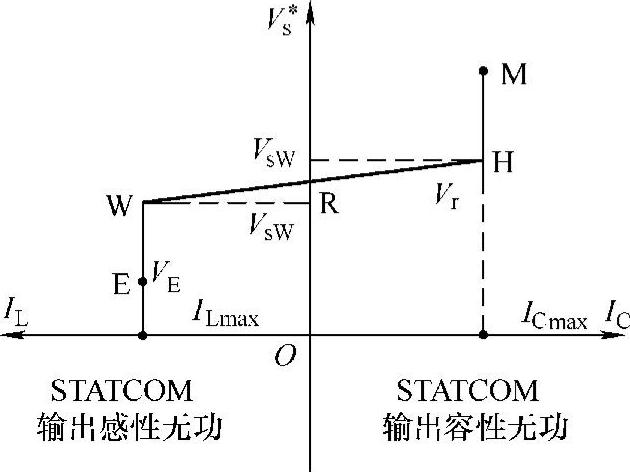
图5-29 电压指令值Vs∗与变流器输入、输出无功的关系
2)暂态稳定控制。在第1章中已说明,在电力系统发生线路短路事故等大扰动的暂态过程中,特别是在故障切除后的暂态过程中,调控节点电压可显著调控发电机的电磁功率,提高确保暂态稳定条件下发电机的功率极限值。由于发电机功角δ难于直接检测,在图5-28中,通过检测发电机输出的传输功率Pe或系统频率变化Δf,计算得到发电机遭受扰动的暂态过程中功角的变化情况,从而产生一个附加的ΔVT(暂态电压控制量),经自动电压调节器AVR影响指令值QV,调控电网电压Vs,改变发电机暂态中的电磁功率Pc,减小不平衡功率,提高暂态稳定性。
3)功率低频振荡阻尼控制。考虑摩擦阻力转矩Td=Doω以后,由转子的运动方程式(1-20F)可得

摩擦阻转矩Td与发电机电磁功率Pe、电磁转矩Te一样,都具有平衡暂态转子的转矩不平衡、阻尼转子相对加速运动的作用。在发电机功率低频振荡、转子转矩不平衡的暂态中,若原动机功率P0不变,在功率振荡期间,原动机转矩增量ΔTo=0,由式(5-92)得到增量动态方程为

图5-28中低频功率振荡阻尼控制环节检测发电机的电磁功率Pe(或频率变化Δf)或直接检测角频率变化Δω。输出ΔVD=KDΔω,ΔVD使图中Vs的指令电压Vs∗Σ增大ΔVD,进而使STATCOM控制的母线电压Vs增大ΔVSD,导致暂态中发电机电磁功率对应的电磁阻转矩增大ΔTeD,ΔTeD与ΔVD有关。若取ΔTeD=CDΔVD,则ΔTeD=CDKDΔω,有了ΔVD产生的ΔTeD,式(5-93)中应增加一项ΔTeD,即

比较式(5-93)和式(5-94)可知,在STATCOM外环控制中,引入与Δω成正比的速度较慢的低频功率振荡阻尼控制量ΔVD=KDΔω后,系统的阻尼系数从摩擦阻尼系数D0增加到了D0+KDCD,由于系统等效阻尼系数增大,因此能更好地阻尼系统振荡。
为了抑制速度较快的次同步振荡,图5-28在自动电压调节器AVR输出侧引入了次同步振荡阻尼控制输入ΔQs。ΔQs由系统频率变量Δf或发电机相对速Δω检测值确定,采用bang-bang控制,例如当Δω为正值时,令次同步振荡控制器输出的ΔQs为正值;当Δω为负值时,令ΔQs为负值,使STATCOM的输出无功在某一正、负值之间变化来抑制发电机转子次同步振荡。如果将这个次同步振荡阻尼控制信号ΔQs放在图中AVR前面输入,由于AVR的控制延时,将失去快速调控次同步振荡的功能。
4)无功储备控制。STATCOM输出无功电流的最大值由其开关器件的额定电流限定,其过负荷能力远小于发电机、变压器,且允许的过负荷时间也很短。但STATCOM的特点是在其提供的补偿电流限值内,它可以是一个快速响应的可控的无功电流源。为了发挥其快速响应这一突出特点,以应对电力系统可能遭遇的突发扰动,可设计正常工作时STATCOM不满负荷工作。正常工作时应适当设置其输出无功指令值不致太高,使它留有一定的功率储备,以便在突发扰动时能快速增大输出无功,防止电压崩溃,并改善系统的动态性能,提高稳定性和有能力抑制功率振荡。正常工作时由适当设置STATCOM的工作点来维持一定的无功储备,实现暂态时无功储备的自动控制策略,被称为无功储备控制(Var Reserve Control),这可由工作点控制(Operation Point Control)来实现。
图5-28中无功储备控制环节是一个慢速积分环节、输出量ΔVRes变化的时间常数较大,其取值为

式中,当Iq≠Iq∗时,ΔVRes缓慢地变化;Iq∗与是稳态运行时无功储备环节积分器的无功指令;Iq是STATCOM输出的无功电流。
电力系统遭受突发扰动,例如电网电压VS突然下降而需快速补偿系统无功时,由STATCOM快速响应承担无功调控,这时图5-28中的快速电压调节器AVR立即响应,使STATCOM快速输出更多的无功Q和电流Iq。同时由于这时输出的Iq>Iq∗(无功储备环节积分器的无功指令),使ΔVRes按式(5-95)较慢地积分变得越来越负,因而在AVR快速响应的基础上无功储备环节输出的ΔVRes仅缓慢地逐渐改变(变小)STATCOM总的指令电压Vs∗Σ,使STATCOM输出的无功电流Iq也缓慢地减小,最终使STATCOM输出的无功电流Iq逐渐减小到初始指令值Iq∗。在这一过程中电力系统其他动作不快的无功电源(如发电机增强励磁电流和机械式投切电容等),逐渐承担STATCOM逐渐卸下的无功负荷,这样就使STATCOM的动态快速可控的无功功率容量得以储备起来,以准备好对付新的突发扰动再次出现时的快速调控要求。整个调节过程中,快速自动电压调整的AVR起到了快速响应大干扰时端电压瞬时大幅下降时的动态补偿要求的作用,有利于改善系统的动态特性。而无功功率储备控制是一个慢过程,这一慢过程既不影响AVR的快速响应效果,又与其他“慢速”的无功补偿电源的补偿作用,“此退彼进”协调工作,使STATCOM的稳态无功电流输出维持在一个适当的给定值,储备了一定的动态可快速调控的无功功率,以应对下次突发的大扰动。
5)其他附加控制。图5-28中的附加控制环节可作为其他特定要求的备用环节。显然,按图5-28所示的STATCOM的多目标控制策略框图要设计一个同时满足以上多个控制功能的控制系统是十分困难的,实际运行中几乎是不可能的,因为上述控制目标在一定的条件下是相互矛盾的。此外,电力系统运行参数控制器的设计在技术上又存在两个难点:首先现代电力系统本身是一个众多机组经大量不同电压等级的主干输电线路互联的地域辽阔的大系统。正常运行时系统中所有的发电机均在同一频率下运行,系统中的主要设备如同步发电机,其运行特性和控制特性均为非线性。其次电力系统是一个变结构,变参数系统。电力系统的结构会因正常运行方式、工况的改变或因不同的故障而改变,电力系统的支路等效电路参数会随之改变。因此要设计一个在各种运行情况和系统结构时同时具有多种控制功能、多目标的电力系统控制器是十分困难的。
对STATCOM上述多个控制目标作进一步的分析后得知,电力系统运行中并不是同时对多个控制目标特别是相互矛盾的控制目标具有同等重要的要求。在某一特定的状态下,总有一个是最主要、最重要的控制目标,而其余控制目标在这时是次要的。例如,在电力系统发生短路故障后的暂态期间,其最主要的目标是保证系统不失去稳定性,而电压只要不超过额定值的1.2倍即可。在以后的过渡过程中,则要求具有良好的动态品质,快速平息振荡,最后才要求电压严格保持在额定值附近。对正常工作下的小扰动,则要求系统电压严格保持在额定值左右,且动态品质良好。在系统中出现振荡时,则要求增加阻尼快速平息振荡,而平时不要求过强的阻尼,否则系统的动态品质会过于呆滞。因此如果对某几种相互矛盾的目标分别设计控制规律,再用一个目标辨识器根据系统运行的状态辨识当前系统的主要控制目标和要求,然后根据该控制目标去选择对应的控制规律,就有可能较好地协同解决电力系统多目标的控制问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。