



根据电力系统的运行要求,静止无功补偿SVC有三种基本控制要求或控制目标:维持负荷节点母线电压不变或维持节点母线电压为指令值、输出指令要求的无功功率和改善电力系统的动态性能。
1.维持负荷节点母线电压VL为指令值(VL=Vref)
在图5-15a中,在系统电压VS和线路电抗XS一定时,若负荷无功电流IF改变,可通过调控静止无功补偿器SVC向电网输出的感性无功电流ISVC(矢量I·SVC=-I·C-I·L,数值ISVC=IC-IL),改变线路无功电流IQ(IQ=IF-ISVC),从而改变IQ在电抗XS上的电压降XSIQ的大小(XsIQ=Xs(IQ-ISVC)),维持母线节点电压VL为指令值Vref。
图5-15b是一种通过相控TCR使SVC维持节点电压VL的闭环控制系统结构框图,图中实时检测负荷电压V·L和电流I·,通过负荷无功电流计算环节求出负荷电流中的感性无功电流IF。实时检测负荷节点电压VL并与负荷节点电压指令值Vref相比较,将其差值ΔV=VL-Vref送入比例积分(PI)型自动电压调节器AVR。AVR的输出作为使电网节点电压VL跟踪指令值Vref所需的电网线路无功电流的指令值IQref,即

式中,ΔV=VL-Vref;Kp、Ki分别为比例系数和积分系数。
将负荷无功电流IF与线路无功电流指令IQref相减,得到SVC应输出的无功电流指令值,即

图5-15b中的TSC电流计算环节的功能是根据检测到的负载无功电流IF的大小,确定多少组TSC投入和可能提供的容性补偿电流IC。再将ISVCref与IC相减得到TCR的指令电流ILref。再由图5-15b中的TCR晶闸管触发延迟角α的计算环节,根据TCR的指令电流ILref算出IL=ILref时必须的触发延迟角α,同时锁相电路检测出节点电压VL瞬时值的相位,再根据要求的触发延迟角α值,发出晶闸管触发信号,开通TCR的晶闸管,产生所需的电感电流IL。
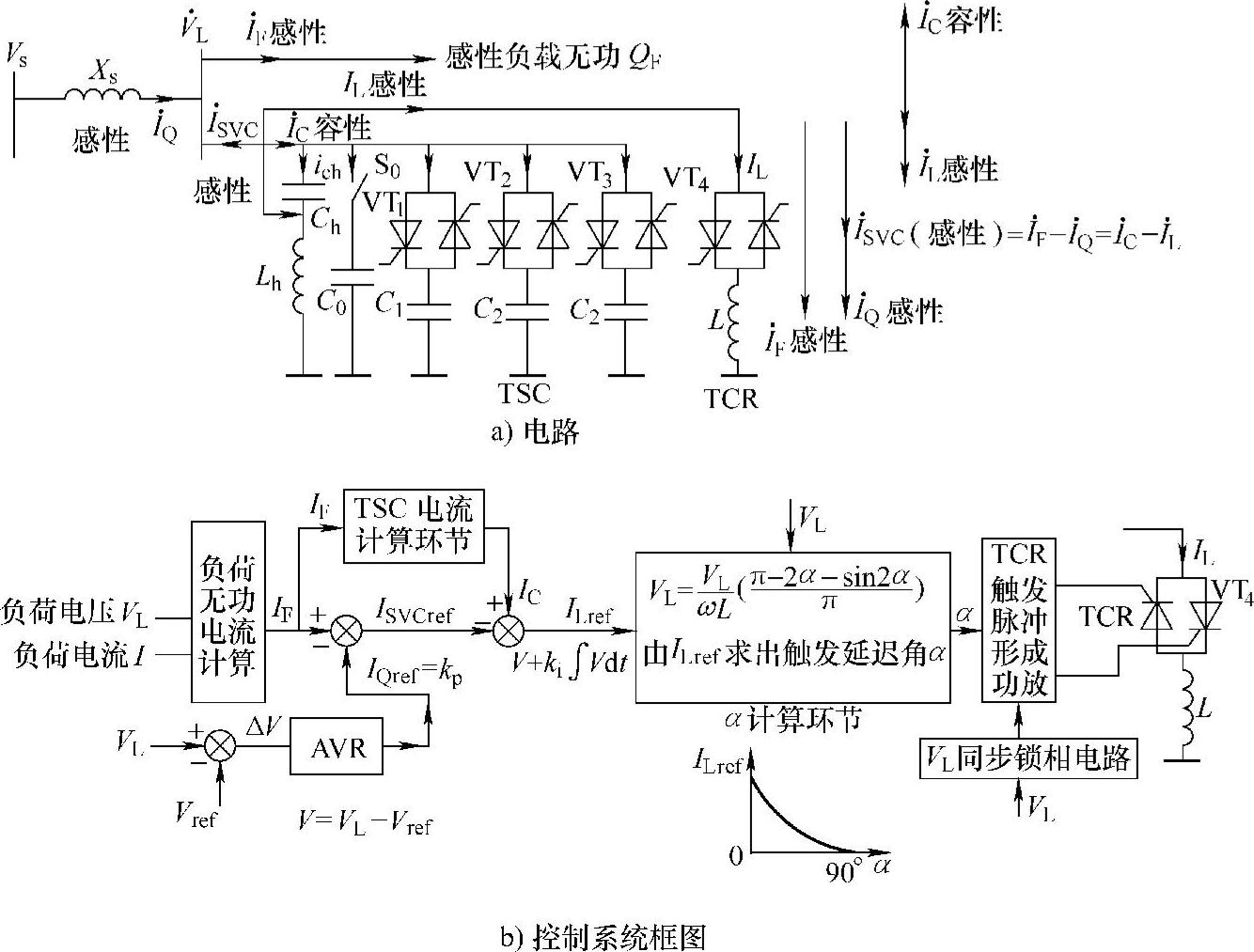
图5-15 调控维持节点电压VL的控制系统框图
由图5-15a可知,SVC(TSC、TCR组合)向电网输出的感性补偿电流ISVC与线路传输的感性电流IQ之和供给负载感性无功电流即:
ISVC+IQ=IFISVC=IF-IQ (5-39)
在图5-15a中,各电容器输入的容性电流之和为I·C,等效于电容向电网输出感性电流IC,电容输出的感性电流的数值|IC|应于等|IL|(感性)与ISVC(感性)之和:|IC|=IL+ISVC
因此,有
IL(感性)=|IC|-ISVC=|IC|-(IF-IQ)=|IC|+IQ-IF (5-40)
式中,IF为图5-15a中负荷感性无功电流;IQ为电网线路感性无功电流。(https://www.xing528.com)
如果图5-15b中电网无功电流IQ的指令值为IQref,由式(5-37)和式(5-40)可得,TCR电流IL的指令值ILref为
ILref=|IC|-ISVCref=|IC|+IQref-IF=|IC|+Kp(VL-Vref)+Ki∫(VL-Vref)dt-IF (5-41)
图5-15b中自动电压调节器AVR的功用是:当出现ΔV=VL-Vref≠0,即VL≠Vref时,AVR输出的IQref改变,从而按式(5-41)改变ILref,使TCR输出的实际电流IL跟踪指令值ILref,改变路线无功IQ,改变线路电压降XsIQ,直到VL改变到VL=Vref,ΔV=0达到新的稳态。
1)当VL<Vref时,这时应减小电网线路电流中的感性滞后无功电流IQ,以减小线路电压降,提升VL→Vref。具体调节过程是:当VL<Vref时,ΔV=VL-Vref为负值,图5-15b中线路无功电流指令值IQref持续减小,ISVCref按式(5-38)持续增大,因而TCR的电流指令值ILref持续减小,TCR的晶闸管触发延迟角α持续增大,使TCR的感性无功电流IL持续减小。随着IL的减小,图5-15a中的SVC输出的感性补偿电流ISVC(感性)增大,补偿了更多的负荷感性无功电流,因而使电网线路中的感性无功电流IQ减少,减少了线路电压降。于是,节点电压VL逐渐上升恢复到VL=Vref,这时ΔV=0,指令值IQref不再增大,ILref也不再增大,TCR中晶闸管触发延迟角α不再增大,IL不再减小,系统稳定在VL=Vref稳定工作。
2)当VL>Vref时,ΔV=VL-Vref为正值,IQref持续增大,ILref持续增大,TCR的晶闸管触发延迟角α持续减小,TCR从电网吸收的感性电流IL不断增大,使电网线路感性无功电流IQ不断加大,线路电抗电压降XIQ不断增大,从而使节点电压VL不断下降到VL=Vref后,ΔV=0,Isqref、ILref、α及IL都不再变化,系统在VL=Vref下稳态工作。
如果图5-15b中的自动电压调节器采用PI型控制策略,则最终的稳态工况总是VL=Vref,但有时SVC受设计容量所限不足以输出足够大的无功补偿功率使VL=Vref。这时应对指令值Vref加以限制,仅使节点电压达到一个可以允许的稍低的电压水平。此外,为改善调控过程中实际运行特性,调节器除采用PI型控制外,还可采用其他控制规律,如较复杂的非线性控制等。
2.SVC输出指令要求的无功功率
仅要求SVC实现输出指令所要求的无功功率时,控制系统比较简单。这时如图5-16b所示,将指令要求SVC输出的无功功率指令值QSVCref与实时检测的SVC输出的无功功率QSVC相减,将其差值ΔQSVC送入自动无功功率调节器AQR。AQR也可是PI型调节器,其输出作为SVC的输出无功电流指令值ISVCref,再根据要求输出的无功指令值Qref的大小和性质,由TSC电流计算环节给出SVC中TSC应输入的容性电流或应输出的感性电流|IC|。|IC|与ISVC之差就是SVC中TCR的感性电流指令值ILref,再由TCR的电流指令值ILref计算出TCR晶闸管触发延迟角α,形成TCR晶闸管触发脉冲信号对晶闸管进行相控,产生相应的IL,使SVC输出的无功QSVC跟踪指令值Qref。
3.改善电力系统的动态(暂态)性能
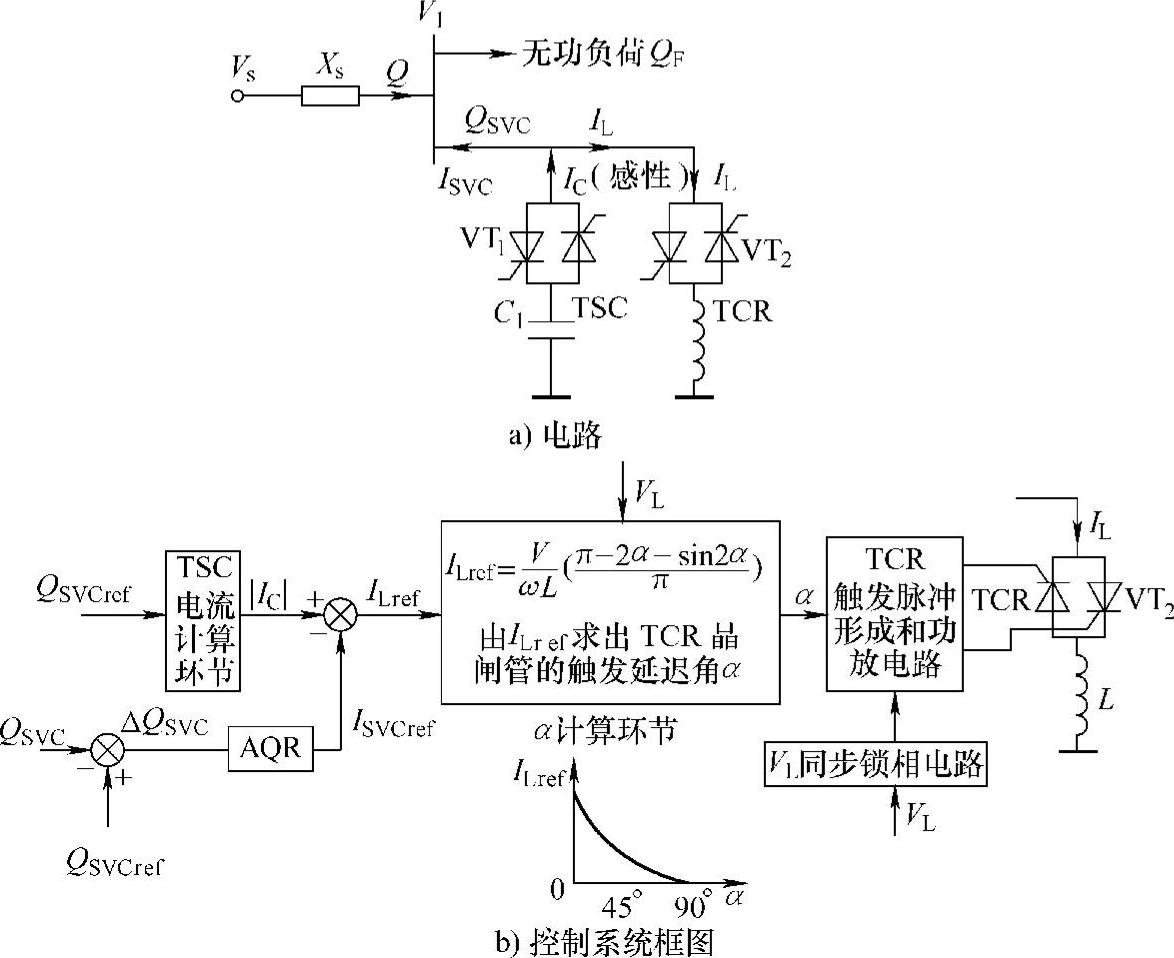
图5-16 输出指令无功功率控制系统框图
调控SVC输出的无功功率的大小和性质,可以改变节点电压、发电机的输出功率,调控电力系统暂态中节点电压和发电机的电磁功率,能抑制电压振荡和功率振荡,改善电力系统的运行稳定性。图5-17示出了一种能维持电力系统节点电压和改善同步发电机暂态稳定性的控制系统框图。其基本思路是在维持节点电压闭环控制系统(参见图5-15b)中的自动电压调节器AVR按电压偏差输出控制量的基础上,再增加一个控制量Vpss,图5-17中APR是电力系统功率振荡调节器,实时检测和计算发电机的电磁功率Pe、发电机功率角δ,相对速度Δω(Δω=dδ/dt)及加速度dΔω/dt=d2δ/dt2等运行参数的大小,经功率振荡调节器APR输出一个适当的控制量Vpss,Vpss再与电压偏差量ΔV一起作为自动电压调节器AVR的输入。这时AVR的输出(电网线路的电流指令ISref)不仅反映了电压偏差,而且包含有为抑制功率振荡所必需的控制量两种作用。这种控制策略的闭环控制系统同时具有AVR和功率振荡镇定器PSS两种功能。自动电压调节器可以维持节点电压不变或暂态中在一定的范围内对电压扰动进行控制,而功率振荡镇定器PSS的调节器APR则向AVR提供附加控制量Vpss,在暂态过程中发挥对节点电压变化和有功功率的快速控制能力,增强系统的阻尼作用,抑制功率振荡,提高电网遭受小干扰时的静态稳定性和遭受大干扰时的暂态稳定性。
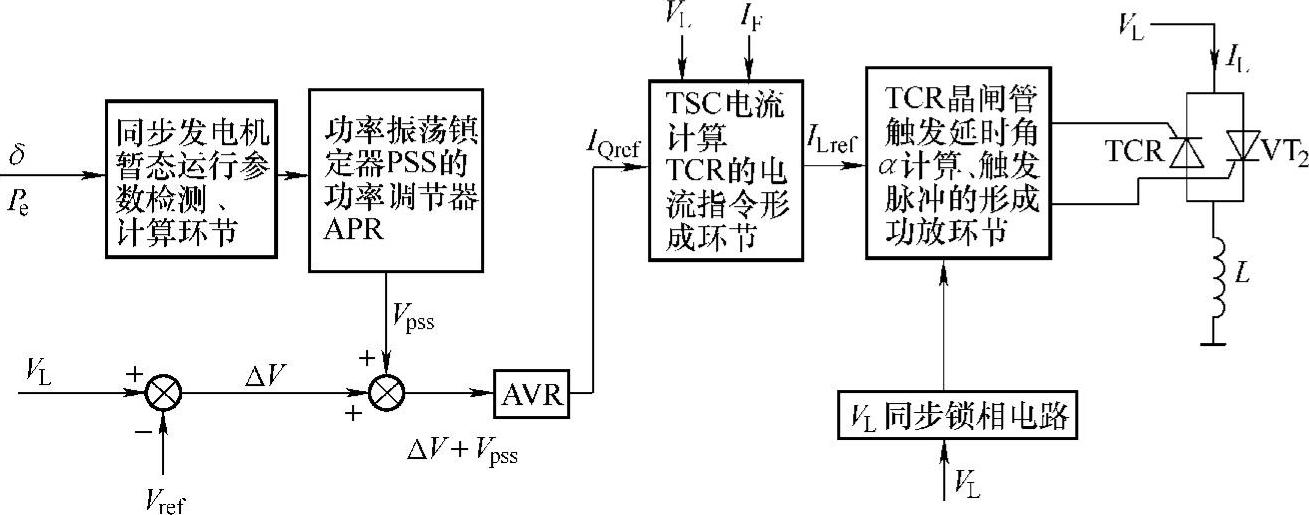
图5-17 AVR和PSS组合的SVC控制框图
仔细分析以上两种控制功能,不难看到SVC同时实现上述两种控制目标存在一定的矛盾。电压控制的目标本来是按电压偏差的大小和正负值的不同调控无功的大小,要求稳定节点电压VL不变。但引入附加控制量Vpss以后,在暂态中为了能调控发电机有功功率以抑制功率振荡,增加系统阻尼,改善稳定性,又必须改变节点电压VL以改变发电机的电磁功率。为协调、兼顾这种相互矛盾的控制要求,图5-17中采用的控制策略原则是:系统稳态运行时令附加控制量Vpss趋近于零,这时功率振荡调节器APR不起作用,当系统发生故障或遭受其他重大扰动时,在AVR的输入中引入附加控制量Vpss,这就等效于适当放宽了无功补偿器SVC的电压指令Vref,功率振荡镇定器PSS起作用,功率调节器APR输出一个适当的控制量Vpss,Vpss与ΔV一起送入自动电压调节器AVR,改善电力系统的动态(暂态)稳定性能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。