



1.三相桥逆变电路SPWM控制基本原理
图2-21a中的6个开关器件,如果按180°导电方式运行,即在一个交流输出电压周期360°时期中,每相的上、下两个开关管各持续导电180°,并按6个开关管的编号依次相差ωt=60°开始导电,即ωt=0°时,VT1开通;ωt=60°时,VT2开通;ωt=120°时,VT3开通;ωt=180°时,VT4开通;ωt=240°时,VT5开通;ωt=300°时,VT6开通。由于每个开关都持续导通180°,故任何时刻都有三个开关同时导通,这时图2-21a中三相电压vAO、vBO、vCO都是180°脉宽方波,幅值为VD/2,波形如图2-21b所示。相电压基波有效值为2VD/π=0.45VD;相电压中含有n=1,3,5,7…奇次谐波,而线电压vAB则为幅值为VD的120°方波,不含3n次谐波,线电压基波有效值为6VD/π=0.78VD。三相桥逆变电路中,在一个交流输出周期中,上、下开关管仅通、断一次,正、负半周中持续导电180°,使输出电压中含有大量的幅值也不小、频率又不高的谐波。
对于三相逆变器也可以采用本章2.7.1节中已介绍的类似于单相逆变器的多脉波PWM控制或SPWM控制方式。在输出电压的每一个周期中,各开关器件通、断转换多次,调控逆变器输出电压的波形,既可消除输出交流电压中的低次谐波,改善输出电压波形,又可调节、控制输出基波电压的大小。
在图2-21a中,若A相输出端A点对负载中点N的输出电压的基波分量为viA(viA=Vimsin(ωt+δ)),δ为viA的初相角。A相负载电压为vsA,vsA=Vsmsinωt,viA超前vsA的相角为δ。在三相A、B、C坐标系中三相电压平衡方程为

采用d、q变换,由式(2-91)可得到类似式(2-63)、式(2-64)的d、q坐标系中电压平衡方程,即


稳态时 ,
, 。在图2-21d中,d轴取在
。在图2-21d中,d轴取在 方向上,故Vsd=Vs,Vsq=0,id为正值,但无功电流iq为负值(iq滞后
方向上,故Vsd=Vs,Vsq=0,id为正值,但无功电流iq为负值(iq滞后 为感性电流)。若取有功电流为Id,感性无功电流为Iq,即Id=id,Iq=-iq,则式(2-92)和式(2-93)可简化为
为感性电流)。若取有功电流为Id,感性无功电流为Iq,即Id=id,Iq=-iq,则式(2-92)和式(2-93)可简化为
vid=vsd-ωLiq=vsd+XIq (2-94A)
viq=vsq+ωLid=XId (2-94B)
由式(2-83A)空间矢量电压平衡方程为

稳态时 (2-94D)
(2-94D)
由式(1-8)、式(1-9B)或图2-21d,逆变器输出至负载的功率为
 (Id为有功电流)
(Id为有功电流)
 (Iq为滞后功电流)
(Iq为滞后功电流)
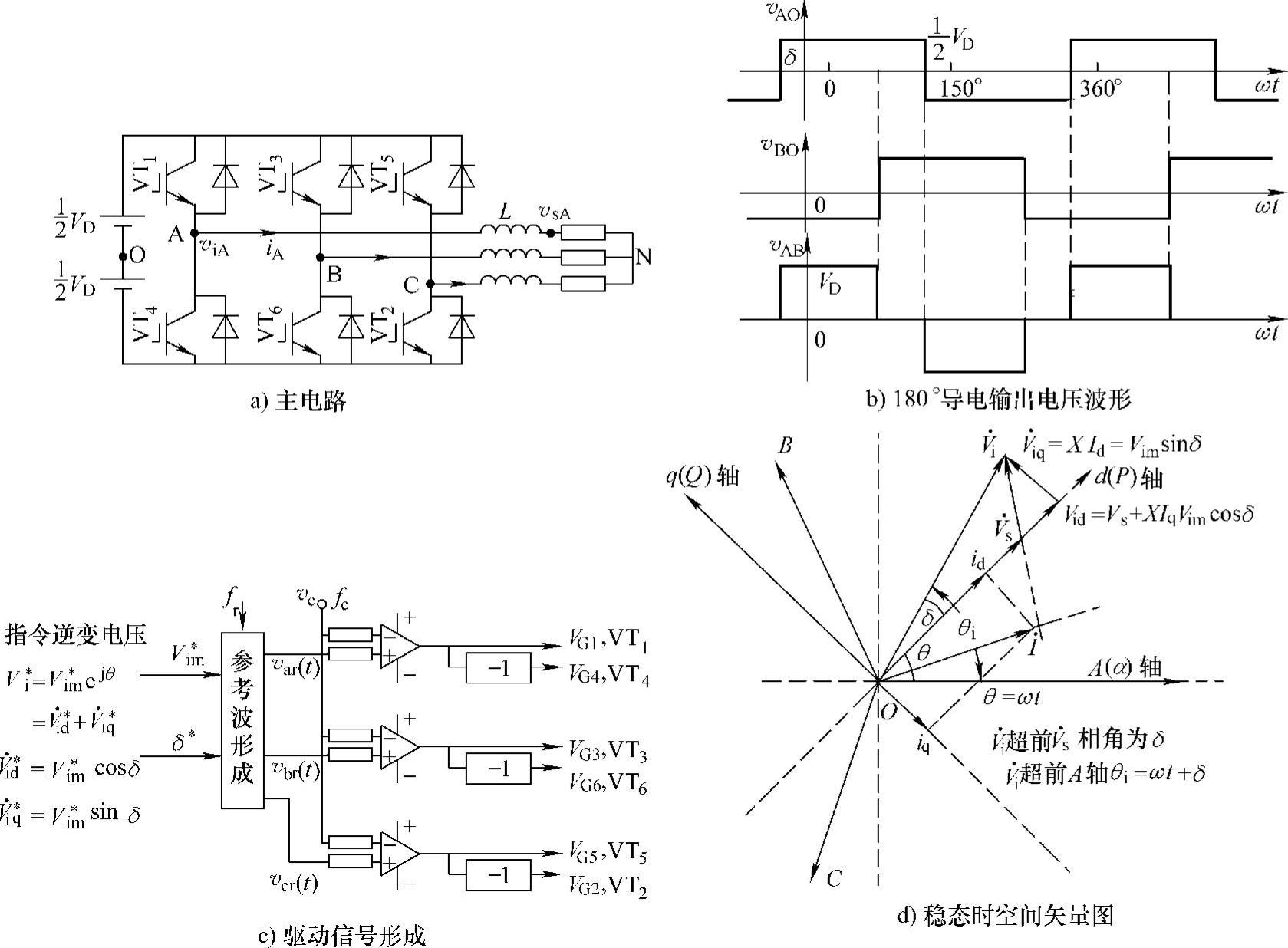
图2-21 三相逆变器SPWM控制原理及波形
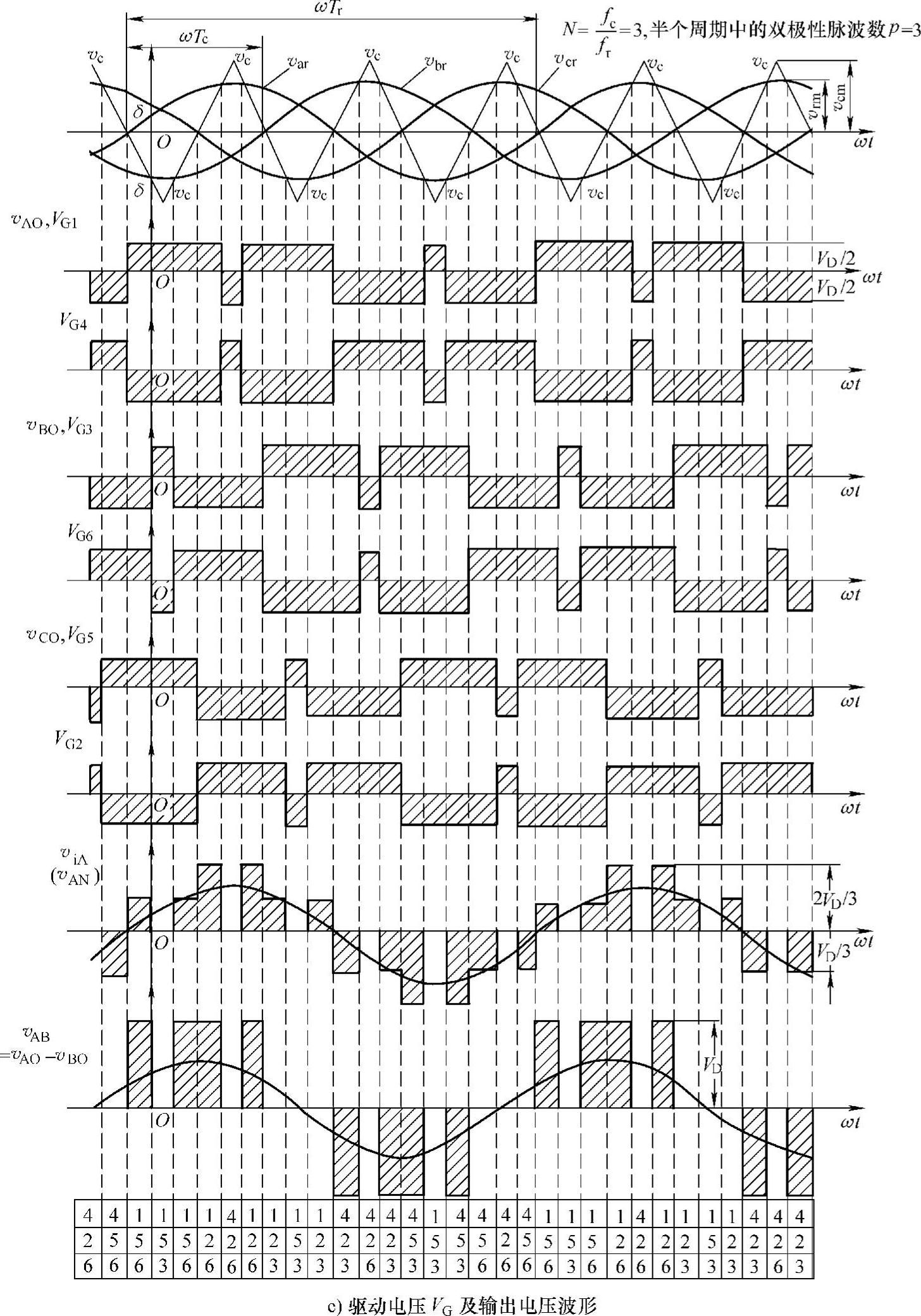
图2-21(续)
逆变器运行的基本要求是:在任何工况下,负载端电压 为指令值
为指令值 ,同时其输出的有功、无功功率独立可控。为此就必须在直流电源电压VD和三相负载改变时,能独立地调控逆变电路交流侧的逆变电压
,同时其输出的有功、无功功率独立可控。为此就必须在直流电源电压VD和三相负载改变时,能独立地调控逆变电路交流侧的逆变电压 的幅值Vim和
的幅值Vim和 超前
超前 的相位角δ,改变Vid(Vimcosδ)和Viq(Vimsinδ)使逆变器输出电压
的相位角δ,改变Vid(Vimcosδ)和Viq(Vimsinδ)使逆变器输出电压 跟踪指令值,输出负载所需的有功和无功功率。
跟踪指令值,输出负载所需的有功和无功功率。
在图2-21c和图2-21e中,若三角形高频载波vc幅值为Vcm、频率为fc。令三相调制波的频率ωr=2πfr=ω=2πfs,ω、fs为逆变器输出电压指令频率,三相调制参考信号正弦电压为
var(t)=Vrmsin(ωrt+δ)=Vimsin(ωt+δ)
vbr(t)=Vrmsin(ωrt+δ-120°)=Vimsin(ωt+δ-120°) (2-95)
vcr(t)=Vrmsin(ωrt+δ-240°)=Vimsin(ωt+δ-240°)式中,δ为参考电压var的相角(见图2-21e);Vrm为调制参考波电压幅值,取Vrm为指令电压 的幅值Vim。
的幅值Vim。
在图2-21c中,三相逆变器输出的逆变电压指令值 是幅值为Vim、相位角为δ,δ是
是幅值为Vim、相位角为δ,δ是 超前负载端电压
超前负载端电压 的相位角。
的相位角。 的d轴分量Vid=Vim cosδ,q轴分量Viq=Vim sinδ,δ=arctan(Viq/Vid),参考波电压角频率为ωr=2πfr,ωr取为逆变器输出电压
的d轴分量Vid=Vim cosδ,q轴分量Viq=Vim sinδ,δ=arctan(Viq/Vid),参考波电压角频率为ωr=2πfr,ωr取为逆变器输出电压 的角频率ω,ω=2πfS,因此,ωr=ω,fr=fS。将
的角频率ω,ω=2πfS,因此,ωr=ω,fr=fS。将 (Vim,δ)和ωr输入参考波形成电路,由Vim、δ和ωrt(ωt)共同产生三相调制参考波正弦电压var(t)、vbr(t)、vcr(t)。var(t)、vbr(t)、vcr(t)再与频率fc和幅值Vcm都固定的双极性三角载波电压vc(t)相比较产生驱动信号VG1、VG4、VG3、VG6、VG5、VG2,控制VT1、VT4、VT3、VT6、VT5、VT26个全控型开关器件的通、断状态,从而控制逆变器输出的三相交流相电压(各相输出端对电源中点O的电压)vAO(t)、vBO(t)、vCO(t)的瞬时值。图2-21c中,var(t)与载波电压vc(t)相比较:当var>vc时,VG1为正值,VT1导通,在图2-21a中,vAO=+VD/2为正脉波电压;当var<vc时,VG1为负值,VT1截止,VT4导通,vAO=-VD/2为负脉波电压。因此逆变电路输出的相电压vAO与驱动信号VG1波形相同,如图2-21e所示,与图2-17d的单极性脉波电压不同,图2-21e中在参考波电压var(vr)的正半波(负半波)期间,输出电压vAO既有正极性电压VD/2,也有负极性电压-VD/2,这时,输出相电压vAO是一个与驱动信号VG1波形相同的双极性脉波电压。vAO的波形由var的幅值和相位角δ∗决定。
(Vim,δ)和ωr输入参考波形成电路,由Vim、δ和ωrt(ωt)共同产生三相调制参考波正弦电压var(t)、vbr(t)、vcr(t)。var(t)、vbr(t)、vcr(t)再与频率fc和幅值Vcm都固定的双极性三角载波电压vc(t)相比较产生驱动信号VG1、VG4、VG3、VG6、VG5、VG2,控制VT1、VT4、VT3、VT6、VT5、VT26个全控型开关器件的通、断状态,从而控制逆变器输出的三相交流相电压(各相输出端对电源中点O的电压)vAO(t)、vBO(t)、vCO(t)的瞬时值。图2-21c中,var(t)与载波电压vc(t)相比较:当var>vc时,VG1为正值,VT1导通,在图2-21a中,vAO=+VD/2为正脉波电压;当var<vc时,VG1为负值,VT1截止,VT4导通,vAO=-VD/2为负脉波电压。因此逆变电路输出的相电压vAO与驱动信号VG1波形相同,如图2-21e所示,与图2-17d的单极性脉波电压不同,图2-21e中在参考波电压var(vr)的正半波(负半波)期间,输出电压vAO既有正极性电压VD/2,也有负极性电压-VD/2,这时,输出相电压vAO是一个与驱动信号VG1波形相同的双极性脉波电压。vAO的波形由var的幅值和相位角δ∗决定。
同理当vbr>vc时,VG3为正值,VT3导通,vBO为正脉波电压,vBO=+VD/2;当vbr<vc时,VG3为负值,VT3截止,VT6导通,vBO为负脉波电压,vBO=-VD/2。vBO也是一个与驱动信号VG3波形相同的双极性电压,vBO比vAO滞后120°。
同理vCO也是一个与驱动信号VG5波形相同的双极性电压,vCO比vAO滞后240°。vAO、vBO、vCO的波形都由Vi∗m和相位指令δ∗决定。
三相电压型逆变电路任何时刻一个桥臂只有一个开关管(例如A桥臂的VT1或VT4)被驱动导通,上、下开关管驱动信号互补。因此三相桥电压型逆变器任何时刻都有3个开关管同时被驱动导通,根据图2-21e 6个驱动信号的波形可以列出三相逆变电路这6个开关管中处于同时导通状态的3个开关管的名称。由此可画出线电压vAB及负载星形联结时负载相电压vs等的波形,例如在VT4、VT5、VT6三管导通期间,图2-21a中vAB=vAO-vBO=0。在VT1、VT5、VT6导通期间, ,类似地分析可画出图2-21e中线电压vAB的波形——单极性PWM脉波。同样的分析可知线电压vBC、vCA与vAB一样也都是单极性脉波电压,且互差120°,vBC、vCA、vAB的波形也都由指令幅值Vi∗m和相位δ∗决定。
,类似地分析可画出图2-21e中线电压vAB的波形——单极性PWM脉波。同样的分析可知线电压vBC、vCA与vAB一样也都是单极性脉波电压,且互差120°,vBC、vCA、vAB的波形也都由指令幅值Vi∗m和相位δ∗决定。
负载为星形联结时,负载中性点为N,当VT1、VT5、VT6同时导通时,A、C两点接电源正端,B点接电源负端,若负载各相阻抗相等,负载阻抗与输出电抗(ωL)等效阻抗为Z,则A点逆变电压 。当VT1、VT2、VT6同时导通时,viA=vAN
。当VT1、VT2、VT6同时导通时,viA=vAN 。当VT1、VT5、VT3同时导通时,A、B、C三点都连在一起,故viA=0,类似地分析可以画出图2-21e所示的负载星形联结时负载相电压viA的波形。类似地分析得知viB、viC与viA一样都是单极性脉波电压而且互差120°。图2-21d表明:viA、viB、viC的相位与三相调制参考电压vra、vrb、vrc同相,因此改变图2-21c中参考电压的相位指令δ∗即可改变
。当VT1、VT5、VT3同时导通时,A、B、C三点都连在一起,故viA=0,类似地分析可以画出图2-21e所示的负载星形联结时负载相电压viA的波形。类似地分析得知viB、viC与viA一样都是单极性脉波电压而且互差120°。图2-21d表明:viA、viB、viC的相位与三相调制参考电压vra、vrb、vrc同相,因此改变图2-21c中参考电压的相位指令δ∗即可改变 的相位。
的相位。
图2-21e中调制比M=Vrm/Vcm≤1、载波比N=fc/fr=3、输出线电压vAB是半周中有p=3个单极性脉波的SPWM脉波电压,除基波外其幅值较大阶次又较低的谐波频率为2p-1=5次谐波,输出相电压vAO是p=3的双极性SPWM波,幅值为VD/2。若调制比M=Vrm/Vcm,则输出相电压vAO的基波幅值为

输出线电压vAB的基波幅值为

输出线电压vAB的基波有效值为(https://www.xing528.com)

所以三相SPWM逆变电路直流电压利用率VAB1/VD=0.612M。如果三相逆变电路开关管180°导电、线电压vAB为120°脉宽、线电压基波有效值VAB1为6VD/π=0.78VD,这时直流电压最高的利用率为VAB1/VD=0.78>0.612M,因此三相SPWM逆变器在改善输出电压波形的同时其直流电压利用率仅为120°方波逆变器的78.5%(0.612/0.78≈0.785),120°方波逆变器能获得的交流基波电压比SPWM逆变器至少要大27%(0.78/0.612≈1.27)。三相逆变器实际应用中常取载波比N=6K-3,式中K为正奇数,N为正奇数。例如当fr=50Hz时,若取三角波频率fc=2.55kHz,这时N=fc/fr=51=2550/50,K=9。逆变电路输出的相电压vAO、vBO、vCO为双极性脉波电压。由深入的数学分析得知,双极性脉波相电压中电压谐波聚集在以N及其整数倍次谐波为中心的频带上,相电压中一些较低次的谐波电压是N±2、2N±1等非3的倍数的谐波。如果选择N为3的倍数,在fr=50Hz时,若fc=2.55kHz,N=51是3的倍数,则由于A、B、C三相基波相差120°,即A、B、C三相的N次谐波相位将相差3×N×120°=360°N,A、B、C三相的N次谐波大小相等、相位相同,因此线电压中不再含N次谐波,线电压中仅含N±2=49或53,2N±1=101或103等次谐波,最低次谐波频率也要比基波高近N倍,这时仅用较小的LC滤波就能使逆变电路输出电压波形近似正弦波。
2.三相桥逆变电路SPWM控制系统
图2-22d给出了d、q坐标系中三相逆变电路SPWM控制系统框图。其控制基本原理基于式(2-92)、式(2-93)。图2-22c为任意工况(稳态或暂态,三相负载平衡或不平衡)时的通用空间电压矢量图。图2-22c中取d轴在电压 方向上,因此输出负载端电压指令值的d轴分量Vs∗d=Vs∗,q轴分量Vs∗q=0;id为有功电流,iq为无功电流。图2-22b中检测交流输出A相电压vsA(vsA=Vsmsinωt),经锁相环(PLL)得到相位角ωt。检测三相电压vsA、vsB、vsC及电流iA、iB、iC瞬时值,由三相静止→两相旋转变换得到d、q轴电压、电流vsd、vsq,isd、isq。图2-22d中,vs∗d、vs∗q为输出到负载端的电压指令,将电压差值Δvd(vs∗d-vsd)、Δvq(vs∗q-vsq)送入电压调节器VdR、VqR得到d、q轴补偿控制电压vcd、vcq,逆变电路交流侧电压
方向上,因此输出负载端电压指令值的d轴分量Vs∗d=Vs∗,q轴分量Vs∗q=0;id为有功电流,iq为无功电流。图2-22b中检测交流输出A相电压vsA(vsA=Vsmsinωt),经锁相环(PLL)得到相位角ωt。检测三相电压vsA、vsB、vsC及电流iA、iB、iC瞬时值,由三相静止→两相旋转变换得到d、q轴电压、电流vsd、vsq,isd、isq。图2-22d中,vs∗d、vs∗q为输出到负载端的电压指令,将电压差值Δvd(vs∗d-vsd)、Δvq(vs∗q-vsq)送入电压调节器VdR、VqR得到d、q轴补偿控制电压vcd、vcq,逆变电路交流侧电压 的d、q分量vi∗d=vcd-ωLiq+vsd,vi∗q=vcq+ωLid+vsq,对照式(2-92)、式(2-93)可知,vcd相当于Ldid/dt,vcq相当于Ldiq/dt。因此,这种闭环控制系统结构中的vcd、vcq仅用于补偿暂态di/dt,稳态时did/dt=0,diq/dt=0,vcd=vcq=0,故稳态时,vid=vsd-ωLiq=vs-Xiq=vs+XIq(图2-21c中iq为负值,即iq为感性无功电流Iq),viq=vsq+ωLid=XId,与稳态时矢量图2-21c一致。而在暂态工况期间,有功电流id的变化引起d轴多了一个电压降Ldid/dt,无功电流iq的变化引起q轴多了一个压降Ldiq/dt,这时就靠补偿电压vcd(Ldid/dt)、vcq(Ldiq/dt)调控v1∗d、v1∗q,使实际v1d、v1q跟踪v1∗d、v1∗q,从而使输出至负载的实际电压vsd、vsq跟踪指令值vs∗d、vs∗q。如果图2-22d中不引入交叉反馈Xid、Xiq,则控制系统中就不必检测实时id、iq,控制系统结构会简化些,这时两个电压调节器(VdR、VqR)的输出vcd应对应-Ldid/dt-Xiq,vcq应对应-Ldiq/dt,vcd、vcq既反应暂态电流变化要求,又反应正交电抗电压降要求(Xiq引起d轴电压降,Xid引起q轴电压降)。而稳态时vcd=-Xiq,vcq=Xid,vcd、vcq仅补偿正交电压降,以使实际
的d、q分量vi∗d=vcd-ωLiq+vsd,vi∗q=vcq+ωLid+vsq,对照式(2-92)、式(2-93)可知,vcd相当于Ldid/dt,vcq相当于Ldiq/dt。因此,这种闭环控制系统结构中的vcd、vcq仅用于补偿暂态di/dt,稳态时did/dt=0,diq/dt=0,vcd=vcq=0,故稳态时,vid=vsd-ωLiq=vs-Xiq=vs+XIq(图2-21c中iq为负值,即iq为感性无功电流Iq),viq=vsq+ωLid=XId,与稳态时矢量图2-21c一致。而在暂态工况期间,有功电流id的变化引起d轴多了一个电压降Ldid/dt,无功电流iq的变化引起q轴多了一个压降Ldiq/dt,这时就靠补偿电压vcd(Ldid/dt)、vcq(Ldiq/dt)调控v1∗d、v1∗q,使实际v1d、v1q跟踪v1∗d、v1∗q,从而使输出至负载的实际电压vsd、vsq跟踪指令值vs∗d、vs∗q。如果图2-22d中不引入交叉反馈Xid、Xiq,则控制系统中就不必检测实时id、iq,控制系统结构会简化些,这时两个电压调节器(VdR、VqR)的输出vcd应对应-Ldid/dt-Xiq,vcq应对应-Ldiq/dt,vcd、vcq既反应暂态电流变化要求,又反应正交电抗电压降要求(Xiq引起d轴电压降,Xid引起q轴电压降)。而稳态时vcd=-Xiq,vcq=Xid,vcd、vcq仅补偿正交电压降,以使实际 跟踪指令值
跟踪指令值 。
。
在图2-22d中,控制系统得到指令值v1∗d、v1∗q以后,由直角坐标-极坐标变换关系得到指令电压 的幅值
的幅值 和相角δ=arctan(Viq/Vid),然后再由图2-21c所示参考电压形成电路,由θi=ωt+δ形成vAr(t)、vBr(t)、vCr(t),再经驱动信号形成电路产生三相桥6个开关管的驱动信号VG1、VG4、VG3、VG6、VG2和VG5,使
和相角δ=arctan(Viq/Vid),然后再由图2-21c所示参考电压形成电路,由θi=ωt+δ形成vAr(t)、vBr(t)、vCr(t),再经驱动信号形成电路产生三相桥6个开关管的驱动信号VG1、VG4、VG3、VG6、VG2和VG5,使 跟踪
跟踪 ,输出至负载的电压
,输出至负载的电压 跟踪其指令值
跟踪其指令值 。
。
3.三相桥整流电路SPWM工作原理
全控型开关管DC⇌AC变流电路既可实现PWM逆变,又可实现高频PWM整流,同一个变流电路可实现交流-直流双向PWM变换。
在图2-23a所示三相桥式交流-直流PWM整流器电路中,交流电源的三相电压vsa(t)、vsb(t)、vsc(t)经电感L接到三相全控桥式整流器。S1~S6为6个有反并联二极管的自关断器件。输出端接大电容C及直流负载(或直流电源),直流侧电压为平稳的直流VD,三相桥式整流器交流输入端交流相电压为vra(t)、vrb(t)、vrc(t),电流为ia、ib、ic,如果交流电源相电压有效值为Vs,则瞬时值为


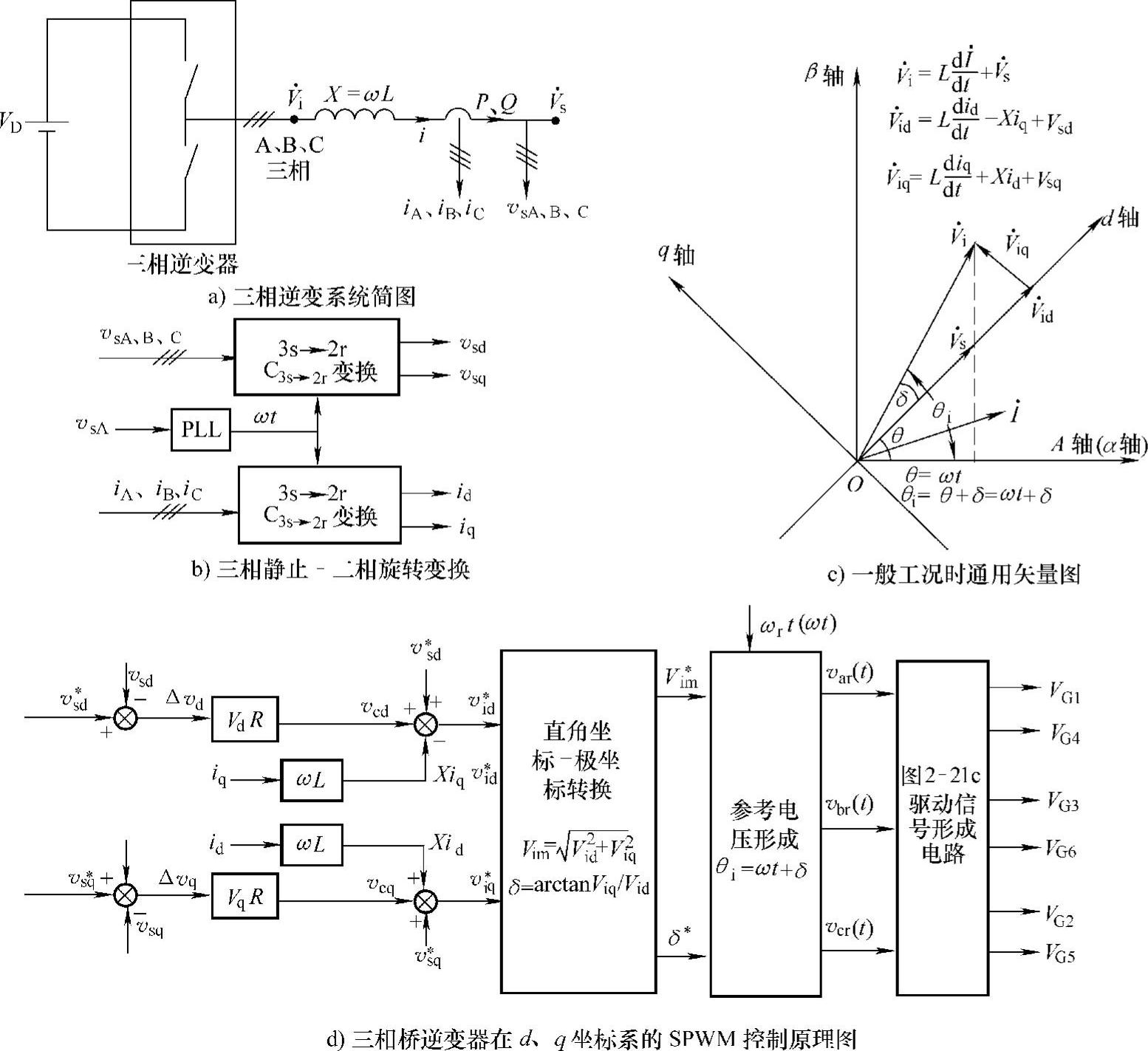
图2-22 三相桥逆变电路SPWM控制系统
如果交流电源流入整流器的电流有效值为I,I·滞后 的功率因数角为φ,则理想的整流器交流电源电流应该是
的功率因数角为φ,则理想的整流器交流电源电流应该是

理想的三相桥整流器交流侧相电压基波应是

式中,Vr为三相桥交流输入端相电压有效值;δ为 落后于
落后于 的相位角,如图2-23b所示。
的相位角,如图2-23b所示。
由式(2-63)、式(2-64)可以得到图2-23a所示三相整流电路在d、q两相坐标系中的电压平衡方程
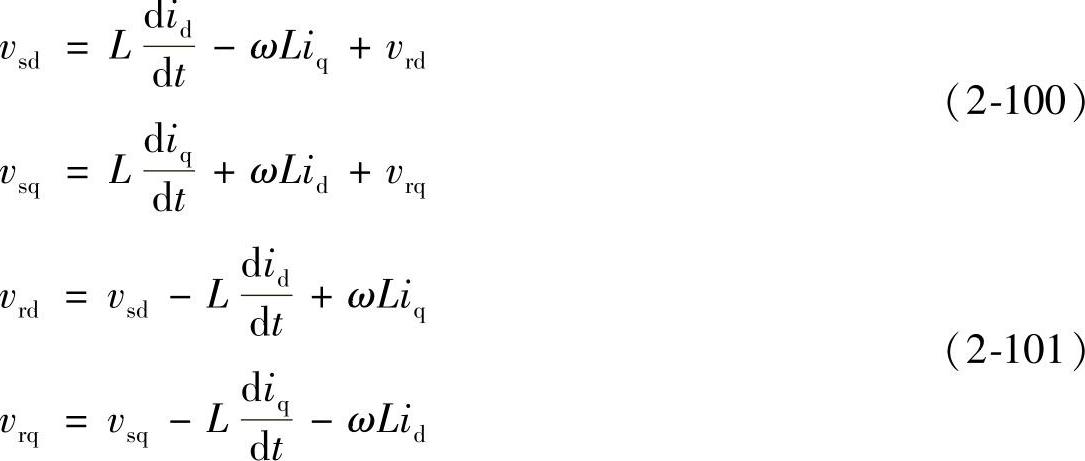
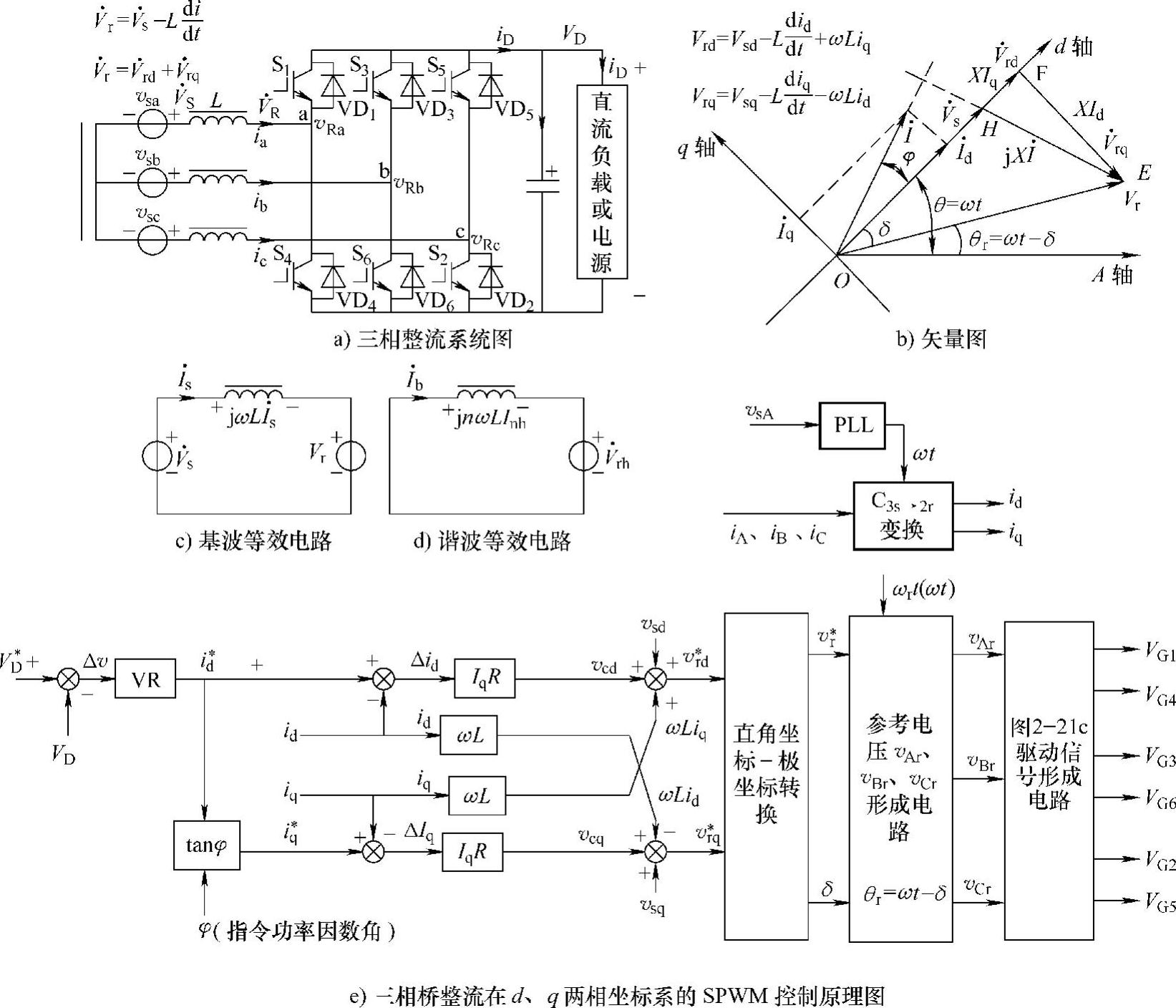
图2-23 三相桥SPWM整流系统
稳态时,did/dt=0,diq/dt=0,电压、电流矢量关系为

图2-23b中取 方向为d轴(或有功p轴)方向,则超前
方向为d轴(或有功p轴)方向,则超前 的纵轴q轴为无功功率Q轴。稳态时,整流器交流输入端电压矢量
的纵轴q轴为无功功率Q轴。稳态时,整流器交流输入端电压矢量 的d轴分量为Vrd、q轴分量为Vrq。图2-23b中,
的d轴分量为Vrd、q轴分量为Vrq。图2-23b中, 在d轴方向,Vsd=Vs,Vsq=0,又iq为正值,表明I·超前
在d轴方向,Vsd=Vs,Vsq=0,又iq为正值,表明I·超前 ,交流电网流入整流电路的电流iq为超前容性电流,或三相桥整流器流入电网的无功电流-iq为感性,即整流器向交流电网输出感性无功功率,起到补偿交流电网感性无功功率的作用。同时id为正值,即交流电网向整流器输入有功功率,变为直流功率后向直流负载提供直流功率。由式(2-100)、式(2-102)或由图2-23b可知:
,交流电网流入整流电路的电流iq为超前容性电流,或三相桥整流器流入电网的无功电流-iq为感性,即整流器向交流电网输出感性无功功率,起到补偿交流电网感性无功功率的作用。同时id为正值,即交流电网向整流器输入有功功率,变为直流功率后向直流负载提供直流功率。由式(2-100)、式(2-102)或由图2-23b可知:
无功电流:Iq=(Vrd-Vs)/X=(Vr cosδ-Vs)/X=Isinφ (2-103)
有功电流: (2-104)
(2-104)
交流电网输入到整流器的有功功率P和整流器向交流电网输出的感性无功功率Q为

整流器运行时,最基本的控制要求是在指令所要求的直流负载整流电压VD一定的情况下,可以独立地调控交流电压 输入到整流器的有功和无功功率P、Q,在交流电压
输入到整流器的有功和无功功率P、Q,在交流电压 的幅值和相位一定时,只要调控变流器交流侧电压
的幅值和相位一定时,只要调控变流器交流侧电压 的大小和相位(
的大小和相位( 滞后
滞后 的相位角δ),就可调控P、Q值。图2-23a中,对6个开关器件进行类似于三相逆变器那样的高频SPWM控制,可以调控三相桥交流侧的电压Vr的大小和相位δ,从而对交流电源
的相位角δ),就可调控P、Q值。图2-23a中,对6个开关器件进行类似于三相逆变器那样的高频SPWM控制,可以调控三相桥交流侧的电压Vr的大小和相位δ,从而对交流电源 输入到整流器的有功、无功功率和电流的大小和方向进行控制,实现高频PWM整流。这时,当整流器交流端电压Vr数值较大,以致Vr cosδ>Vs时,交流电源
输入到整流器的有功、无功功率和电流的大小和方向进行控制,实现高频PWM整流。这时,当整流器交流端电压Vr数值较大,以致Vr cosδ>Vs时,交流电源 向整流器
向整流器 输出正值容性电流Iq或整流器
输出正值容性电流Iq或整流器 向交流电源
向交流电源 输出感性电流Iq和感性无功功率Q。当电压Vr较小,Vr cosδ<Vs时,Iq为负值,Q为负,交流电源向变换器输出感性(滞后)无功电流、无功功率。
输出感性电流Iq和感性无功功率Q。当电压Vr较小,Vr cosδ<Vs时,Iq为负值,Q为负,交流电源向变换器输出感性(滞后)无功电流、无功功率。
当变换器交流输入端电压 滞后于
滞后于 时,即滞后角δ为正值时,式(2-104)、式(2-105)的有功电流Id为正值,P为正,表示交流电源向变换器输出有功功率,经AC-DC变换器输出直流电能给直流负载,变换器工作于整流状态;反之当变换器交流输入端电压
时,即滞后角δ为正值时,式(2-104)、式(2-105)的有功电流Id为正值,P为正,表示交流电源向变换器输出有功功率,经AC-DC变换器输出直流电能给直流负载,变换器工作于整流状态;反之当变换器交流输入端电压 r的相位超前
r的相位超前 时,则滞后角δ为负值,Id为负值,P为负,表示交流电源从变换器输入有功功率,这时变换器实现DC-AC变换,将直流电源电能变为交流电能反送给交流电源(或交流负载),变换器工作于逆变状态。因此,两个交流电源(见图2-23a)
时,则滞后角δ为负值,Id为负值,P为负,表示交流电源从变换器输入有功功率,这时变换器实现DC-AC变换,将直流电源电能变为交流电能反送给交流电源(或交流负载),变换器工作于逆变状态。因此,两个交流电源(见图2-23a) 和
和 ,它们之间的有功电流Id、有功功率P总是从相位超前的电源流向相位滞后的电源;而电压数值高的电源才有可能向电压低的电源输出滞后的感性无功电流Iq和感性无功功率Q。
,它们之间的有功电流Id、有功功率P总是从相位超前的电源流向相位滞后的电源;而电压数值高的电源才有可能向电压低的电源输出滞后的感性无功电流Iq和感性无功功率Q。
图2-23a中,在一定的负载阻抗情况下,输出直流电压VD的大小取决于交流电源输入的有功功率P与负载消耗的功率PO之间的平衡关系,增大P,VD升高,反之,VD降低。在一定的负载稳定工作情况下,保持P恒定,VD随之恒定不变,调节P即可调节、控制整流器输出的直流电压VD。
4.三相桥整流电路SPWM控制系统
对图2-23a中6个开关器件S1~S6进行类似于三相SPWM逆变器的通、断控制,可以在三相桥变换器的交流侧a、b、c三点产生三相对称的交流相电压vra、vrb、vrc。vra、vrb、vrc中除基波交流分量 外,还含高次谐波
外,还含高次谐波 。令S1~S6 SPWM控制的调制参考波频率fr等于交流电源vsa、vsb、vsc的频率fS,则vra、vrb、vrc中的基波频率f1就是交流电源频率fS,而vra、vrb、vrc中的谐波频率则由S1~S6 SPWM控制的高频载波频率fc决定。由于通常SPWM控制的载波比fc/fr>>1,因此vra、vrb、vrc中的高次谐波频率很高。根据叠加原理,图2-23a所示电路可以用图2-23c和图2-23d等效。图2-23c为基波等效电路,其中
。令S1~S6 SPWM控制的调制参考波频率fr等于交流电源vsa、vsb、vsc的频率fS,则vra、vrb、vrc中的基波频率f1就是交流电源频率fS,而vra、vrb、vrc中的谐波频率则由S1~S6 SPWM控制的高频载波频率fc决定。由于通常SPWM控制的载波比fc/fr>>1,因此vra、vrb、vrc中的高次谐波频率很高。根据叠加原理,图2-23a所示电路可以用图2-23c和图2-23d等效。图2-23c为基波等效电路,其中 为交流电源电压矢量,
为交流电源电压矢量, 为变换器所产生的交流侧的基波电压;图2-23d为谐波等效电路,其中交流电源无谐波电压,
为变换器所产生的交流侧的基波电压;图2-23d为谐波等效电路,其中交流电源无谐波电压, 为变换器交流侧电压中的谐波电压。显而易见,只要对S1~S6进行SPWM控制,控制三相变换器交流侧各相SPWM脉波电压vra、vrb、vrc,即可控制图2-23c中的矢量
为变换器交流侧电压中的谐波电压。显而易见,只要对S1~S6进行SPWM控制,控制三相变换器交流侧各相SPWM脉波电压vra、vrb、vrc,即可控制图2-23c中的矢量 的大小及
的大小及 相对于交流电源电压矢量
相对于交流电源电压矢量 的矢量)的相角差δ,就能控制基波电流I·S的大小和相位,实现有功功率和无功功率在交流电源和直流侧电压VD之间的双向流动。此外由于谐波电压频率很高,图2-23d中由SPWM控制所产生的谐波电压vrh频率较高,幅值不大,因而所产生的谐波电流ih可以被控制得很小,可以忽略不计。因此图2-23a所以电路可以实现较理想的高频PWM整流变换。
的矢量)的相角差δ,就能控制基波电流I·S的大小和相位,实现有功功率和无功功率在交流电源和直流侧电压VD之间的双向流动。此外由于谐波电压频率很高,图2-23d中由SPWM控制所产生的谐波电压vrh频率较高,幅值不大,因而所产生的谐波电流ih可以被控制得很小,可以忽略不计。因此图2-23a所以电路可以实现较理想的高频PWM整流变换。
图2-23e给出了三相SPWM整流控制系统基本原理框图。在图2-23a中为了稳定变流器的运行,电容器C上的直流电压VD通常被控为恒定不变,为此应对VD采用电压反馈闭环控制。控制系统检测实际的VD并与指令值VD∗相比较,将电压误差ΔV(=VD∗-VD)送入PI型电压误差调节器VR,PI型调节器VR的输出作为有功电流指令值id∗,再根据所要求的三相整流时的指令功率因数角φ,得到无功电流指令值iq∗(iq∗=id∗ tanφ)。检测交流电源vsA(vsA ,由锁相环(PLL)得到相位角ωt。检测三相交流电源电流iA、iB、iC,经三相静止-两相旋转变换后得到id、iq,将id、iq分别与指令值id∗、iq∗比较,其差值Δid、Δiq送入PI型电流调节器(Id R、Iq R),其输出取为d、q轴补偿控制电压vcd、vcq。vcd、vcq分别对应式(2-100)、式(2-101)中的-Ldid/dt、-Ldiq/dt,再按式(2-100)、式(2-101)得到整流器交流侧基波电压指令值Vrd、Vrq,再由直角坐标-极坐标变换(参见矢量图2-23b)得到Vr=
,由锁相环(PLL)得到相位角ωt。检测三相交流电源电流iA、iB、iC,经三相静止-两相旋转变换后得到id、iq,将id、iq分别与指令值id∗、iq∗比较,其差值Δid、Δiq送入PI型电流调节器(Id R、Iq R),其输出取为d、q轴补偿控制电压vcd、vcq。vcd、vcq分别对应式(2-100)、式(2-101)中的-Ldid/dt、-Ldiq/dt,再按式(2-100)、式(2-101)得到整流器交流侧基波电压指令值Vrd、Vrq,再由直角坐标-极坐标变换(参见矢量图2-23b)得到Vr= 、δ=arctan(Vrq/Vrd)以及Vr∗相对于A相电压的相位角θr=ωt-δ,最后再按图2-21c和图2-21e三相SPWM逆变波形控制原理,由相位角为θr=ωt-δ、幅值与Vr成正比的三相正弦参考电压var、vbr、vcr与高频三角波vc相比较形成6个开关器件的通、断信号,使图2-23a中a、b、c三点输出所需的交流电压为
、δ=arctan(Vrq/Vrd)以及Vr∗相对于A相电压的相位角θr=ωt-δ,最后再按图2-21c和图2-21e三相SPWM逆变波形控制原理,由相位角为θr=ωt-δ、幅值与Vr成正比的三相正弦参考电压var、vbr、vcr与高频三角波vc相比较形成6个开关器件的通、断信号,使图2-23a中a、b、c三点输出所需的交流电压为 ,三相电压如式(2-99)所示。在图2-23e中,当整流负载ID改变、VD改变时,或直流电压指令值VD∗改变使电压误差ΔVD=VD∗-VD≠0时,将使有功电流指令值id∗改变,
,三相电压如式(2-99)所示。在图2-23e中,当整流负载ID改变、VD改变时,或直流电压指令值VD∗改变使电压误差ΔVD=VD∗-VD≠0时,将使有功电流指令值id∗改变, 随之改变,从而改变交流电源送入变换器的有功电流、有功功率。一旦实际电压VD偏低,ΔV>0,id∗增大,则增大交流电源输入的有功功率,使图2-23a中的直流电流iD增大为正,使C充电,提高VD;反之当实际电压VD偏高,ΔV<0,id∗减小,则减小交流电源送入变换器的有功功率,使iD减小,iC反向为负值,电容C参与对直流负载供电,使VD减小。在交流电源电压
随之改变,从而改变交流电源送入变换器的有功电流、有功功率。一旦实际电压VD偏低,ΔV>0,id∗增大,则增大交流电源输入的有功功率,使图2-23a中的直流电流iD增大为正,使C充电,提高VD;反之当实际电压VD偏高,ΔV<0,id∗减小,则减小交流电源送入变换器的有功功率,使iD减小,iC反向为负值,电容C参与对直流负载供电,使VD减小。在交流电源电压 和直流负载任意变化时,这种输出直流电压VD的闭环控制可以使直流输出电压VD维持为指令值恒定不变,同时
和直流负载任意变化时,这种输出直流电压VD的闭环控制可以使直流输出电压VD维持为指令值恒定不变,同时 和电流I·的相位角φ也保持为指令值φ∗,整流器从交流电网(
和电流I·的相位角φ也保持为指令值φ∗,整流器从交流电网( )输入指令所要求的有功和无功功率。
)输入指令所要求的有功和无功功率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。