



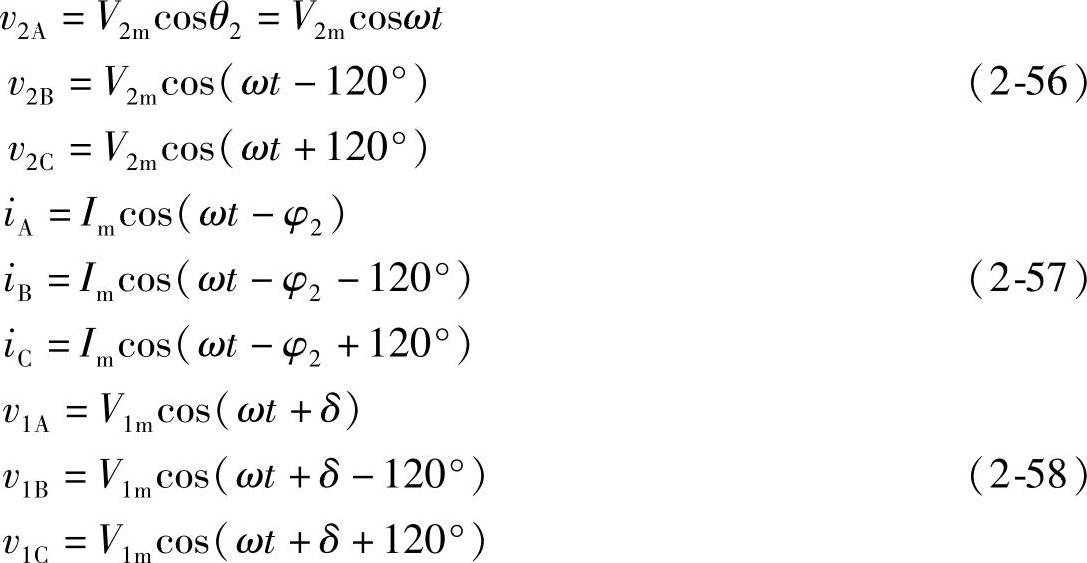
图2-20d中示出了三相静止A、B、C坐标系,两相旋转d、q正交坐标系和两相静止α、β正交坐标系的坐标轴。图中取A相轴线固定在水平方向上,三相静止坐标A、B、C轴线相差120°,取两相静止正交的坐标轴的α轴固定在静止的A轴方向上,β轴超前A轴(α轴)90°;取以速度ω旋转的d、q正交坐标轴的q轴超前d轴90°,d轴超前静止的A轴的相位角θ2=ωt,即d、q轴相对于A、B、C轴以dθ2/dt=ω的速度旋转。在三相交流系统中,幅值为Im(Vm)的三相电流(电压)瞬时值iA、iB、iC(vA、vB、vC)可用一个在空间以角频率ω=2πf旋转的幅值为Im(Vm)的电流(电压)空间矢量 在A、B、C绕组轴线上的投影表示,如图2-20d所示。图中将d轴取在
在A、B、C绕组轴线上的投影表示,如图2-20d所示。图中将d轴取在 方向上。若首端电压的空间矢量
方向上。若首端电压的空间矢量 超前电流空间矢量I·m的相位角为φ1,末端电压的空间矢量
超前电流空间矢量I·m的相位角为φ1,末端电压的空间矢量 超前I·m相位角为φ2,
超前I·m相位角为φ2, 超前
超前 的功角为δ,则电压空间矢量
的功角为δ,则电压空间矢量 、
、 以及电流空间矢量
以及电流空间矢量 都随d、q轴以角速度ω=2πf同步旋转。A、B、C三相电压、电流瞬时值v2A、v2B、v2C、iA、iB、iC、v1A、v1B、v1C可用以速度ω旋转的电压、电流空间矢量
都随d、q轴以角速度ω=2πf同步旋转。A、B、C三相电压、电流瞬时值v2A、v2B、v2C、iA、iB、iC、v1A、v1B、v1C可用以速度ω旋转的电压、电流空间矢量 、
、 、
、 在A、B、C轴上的投影表示。
在A、B、C轴上的投影表示。
引入两相d,q旋转坐标系,用d、q坐标系中新的电流id、iq及i0代替三相静止坐标系中的iA、iB、iC,并定义id、iq、i0与三相静止坐标系中A、B、C三相电流iA、iB、iC有以下以Park命名的经典Park变换关系:

式中,ωt=θ2,θ2是以ω旋转的d轴超前静止的A轴的相位角。三相静止A、B、C坐标系中的电流iA、iB、iC,变换到两相旋转d、q坐标中的id、iq、i0的变换阵C3s→2r为

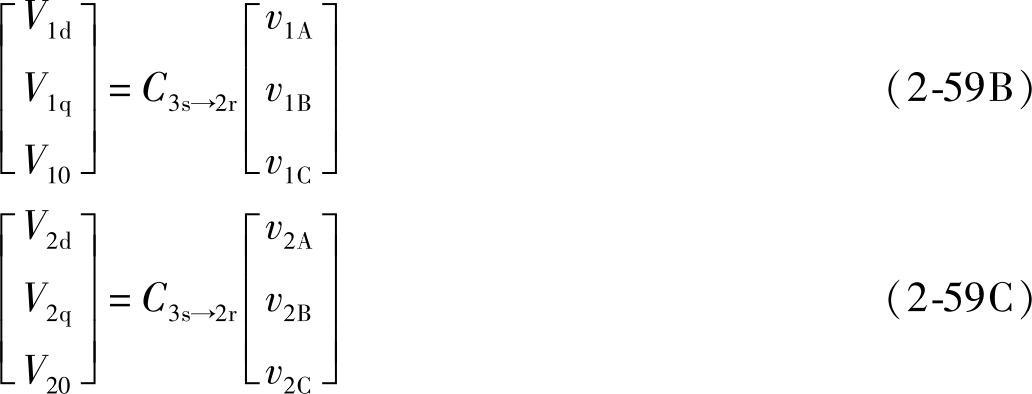
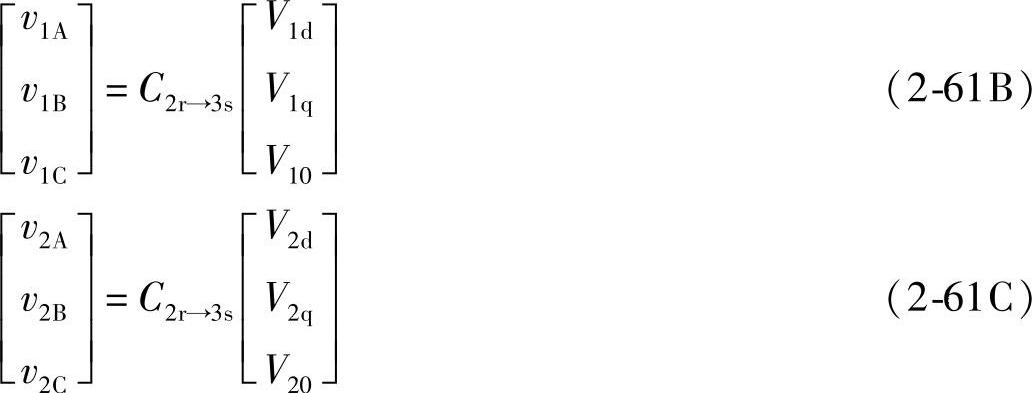
采用同一变换式可将三相电压v1A、v1B、v1C、v2A、v2B、v2C变为V1d、V1q、V10、V2d、V2q、V20:
由式(2-59)可求得经典Park变换的反变换式为

式中,将两相旋转d、q变量变为三相静止A、B、C变量的反变换阵:

采用同一反变换式C2r→3s可将V1d、V1q、V10变为v1A、v1B、v1C;将V2d、V2q、V20变为v2A、v2B、v2C:
将式(2-61A)、式(2-61B)、式(2-61C)中的iA、iB、iC代入式(2-54),可得到d、q两相旋转坐标系中的电压平衡方程,即
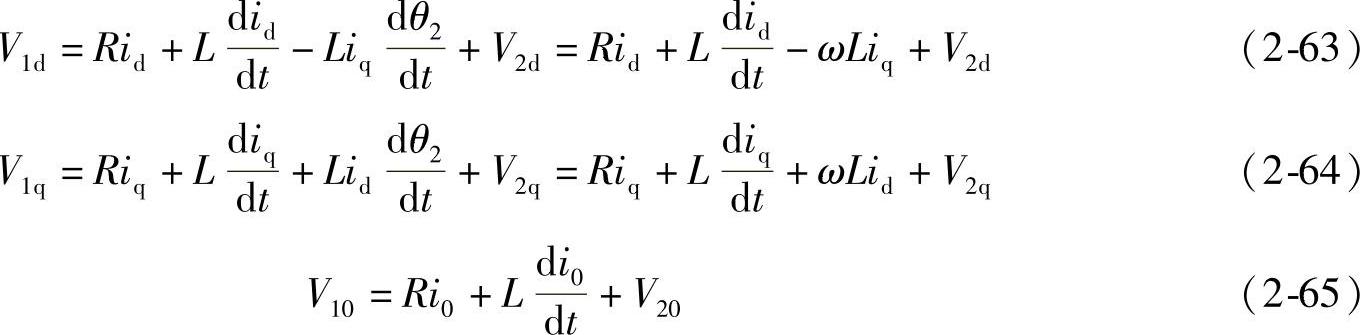
式中,θ2=ωt,dθ2/dt=ω。
式(2-65)独立于式(2-63)和式(2-64),可单独求解。因此在d、q坐标系中,只有两个相关的电压方程和两组正交的d、q电压、电流变量。如果像图2-20d中所示取d轴在某一电压空间矢量方向上,如 取在d轴上,则
取在d轴上,则 ,V2q=0。这时系统特性的分析研究、计算与采用A、B、C三个电压平衡方程相比较要简便得多,同时在两相旋转坐标系中设计控制系统,实现许多控制策略还能获得优良的静、动态特性。
,V2q=0。这时系统特性的分析研究、计算与采用A、B、C三个电压平衡方程相比较要简便得多,同时在两相旋转坐标系中设计控制系统,实现许多控制策略还能获得优良的静、动态特性。
如果引入两相静止坐标系(α,β),取α轴与A相轴线重合,β轴超前A轴(α轴)90°,定义
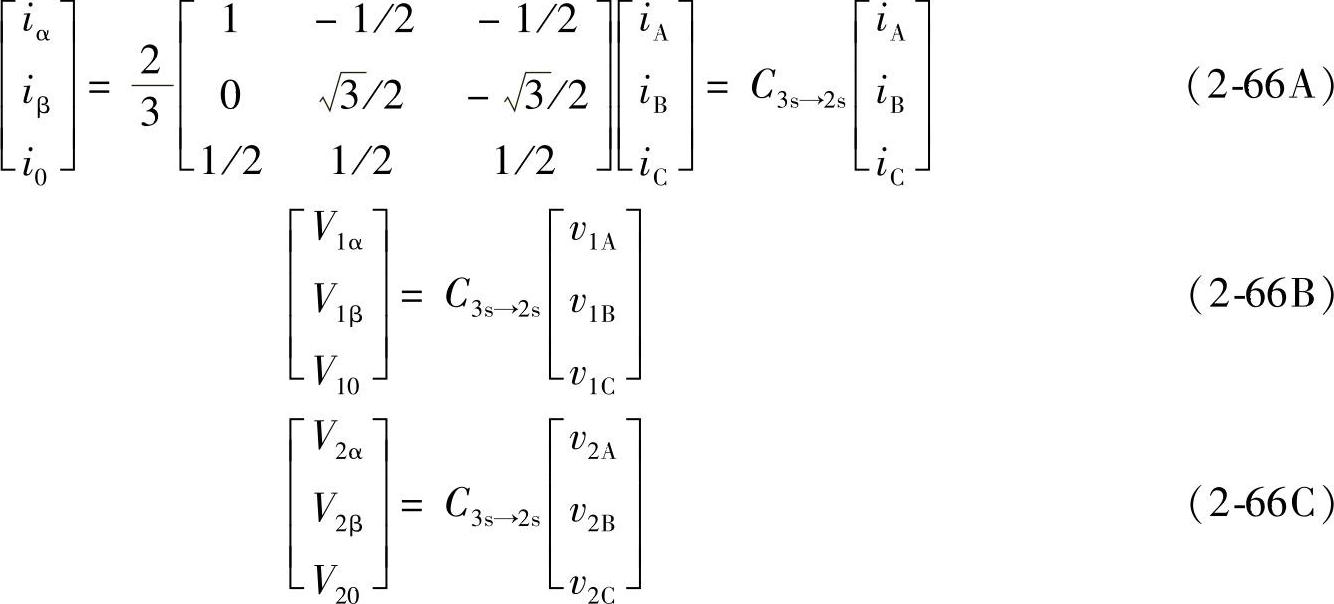
由式(2-66)可求得反变换式为
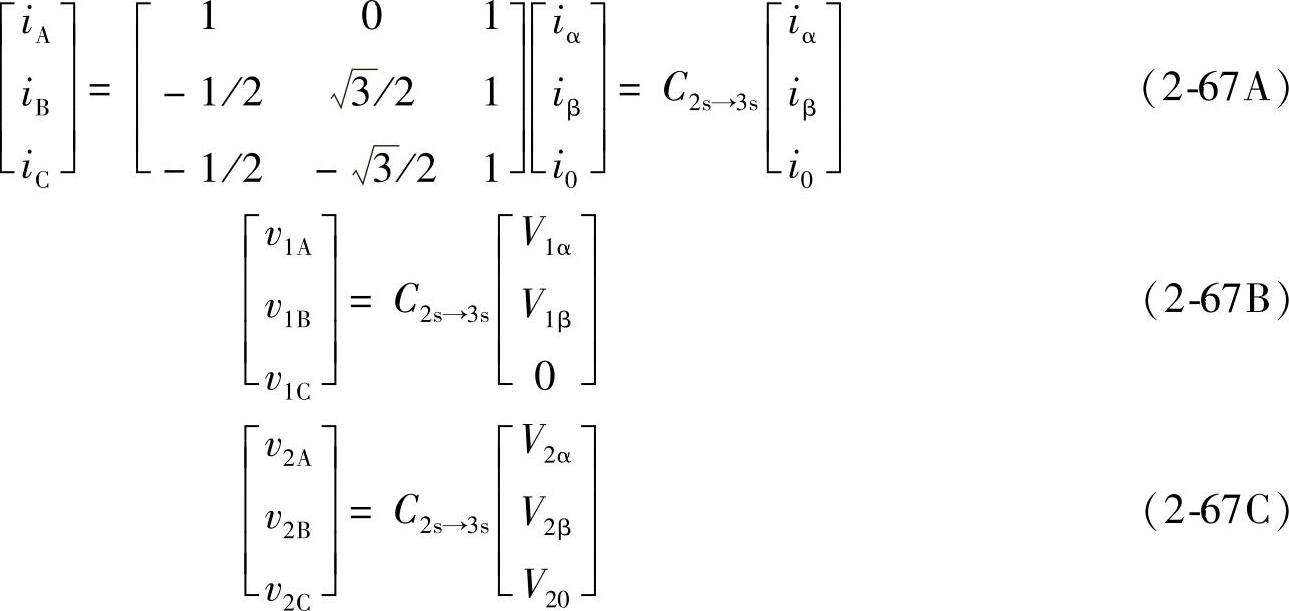
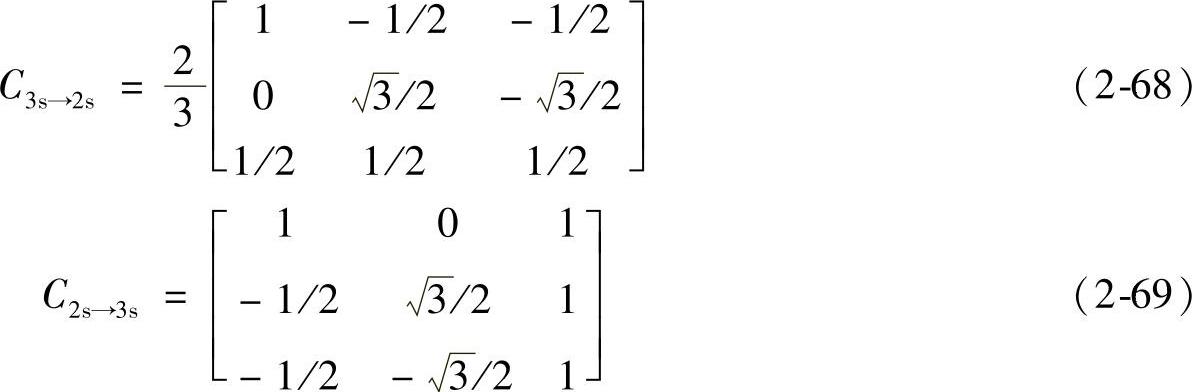
以上三相静止坐标系电压、电流变到两相静止坐标系的电压、电流变换阵C3s→2s及反变换阵C2s→3s为
在式(2-59A)中令ωt=θ2=0,即d轴固定在A轴上,则原两相旋转d、q轴即成为两相静止α、β轴,这时式(2-59A)中的id成为iα,iq成为iβ,变换阵C3s→2r成为C3s→2s,变换阵C2r→3s成为C2s→3s两相旋标d、q正交坐标系电压平衡方程变为两相静止α、β正交电压平衡方程。
把A、B、C三相静止坐标中的电压平衡方程式(2-54)中的变量iA、v1A、v2A用式(2-67A)、式(2-67B)、式(2-67C)中的第一式的iA、v1A、v2A代换,即可得到α、β两相静止坐标系中的电压方程为

将式(2-67A)的iA、iB、iC代入式(2-59A)的id、iq得到

两相静止αβ-两相旋转dq变换阵C2s→2r为

同理


由式(2-72)可求得反变换式为(https://www.xing528.com)

两相旋转dq-两相静止αβ变换阵C2r→2s为

同理

如果三相系统无中线或三相电流平衡(即iA+iB+iC=0),则式(2-59A)中i0=0。如果三相系统三相电压平衡(即vA+vB+vC=0),则式(2-59B)、式(2-59C)中V10=0,V20=0。这时式(2-59)、式(2-60)、式(2-61)、式(2-62)、式(2-66)、式(2-67)、式(2-68)、式(2-69)可简化为

变换阵
反变换阵为

三相静止-三相静止变换阵为

反变换阵为

由式(2-63)、式(2-64)的d、q变量瞬时值电压平衡方程,可求得空间矢量电压平衡方程。
在图2-20d中,d轴超前A轴相位角θ2=ωt,则空间电压矢量为

空间电流矢量为

则有

由式(2-63)、式(2-64)可得到空间矢量 、
、 为
为
因此,空间矢量电压平衡方程为

在稳态运行时, 是幅值Im不变的旋转矢量,此时有
是幅值Im不变的旋转矢量,此时有

因此稳态时式(2-83A)的电压平衡方程简化为

空间矢量方程式(2-83A)在稳态时简化为式(2-83B),图2-20d变为图2-20e。
式(2-83B)与三相电压、电流对称且处于稳态时的电压时间相量方程类似,但以往相量方程中的电压、电流相量为正弦波有效值,而式(2-83B)中的三相电压、电流是在空间以速度ω随同d、q轴旋转的空间矢量,其幅值为 ,
, (I、V为相有效值)。因此,采用式(2-59A)经典Park变换(变换阵有2/3因子,稳态时空间矢量大小为正弦波相电压(电流)的幅值
(I、V为相有效值)。因此,采用式(2-59A)经典Park变换(变换阵有2/3因子,稳态时空间矢量大小为正弦波相电压(电流)的幅值 ,它在A、B、C轴上的投影(分量)当然就是各相电压(电流)瞬时值。
,它在A、B、C轴上的投影(分量)当然就是各相电压(电流)瞬时值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。