



【摘要】:工业机器人由三部分组成,即机械部分、控制部分、驱动部分。控制系统的任务是按作业要求支配机器人工作。目前工业机器人常有4个到6个运动自由度。图7-42 双臂机械手a)斜置式机械手 b)回转式机械手1、2—机械手 3、4—转臂图7-43 工业机器人的组成1—机身 2—控制系统 3—驱动系统 4—上臂 5—腰部 6—前臂 7—腕图7-44 机器人的分类及示例a)机器人的分类 b)示例1—手指 2—腕 3—手臂 4—柱 5—基座
工业机器人由三部分组成,即机械部分、控制部分、驱动部分(图7-43)。机械部分由机身、腰部、手臂、腕部和手组成。机器人用手指抓握工件。机器人一般将手臂的动作简化为连杆、关节运动。驱动部分由液压传动、气压传动并通过同步带、链条等机构驱动。控制系统的任务是按作业要求支配机器人工作。常采用微机控制的机器人。机器人也常用示教再现控制。即是把规定的动作先教给机器人,然后机器人按程序工作。计算机则采用特定的语言所编制的示教程序。
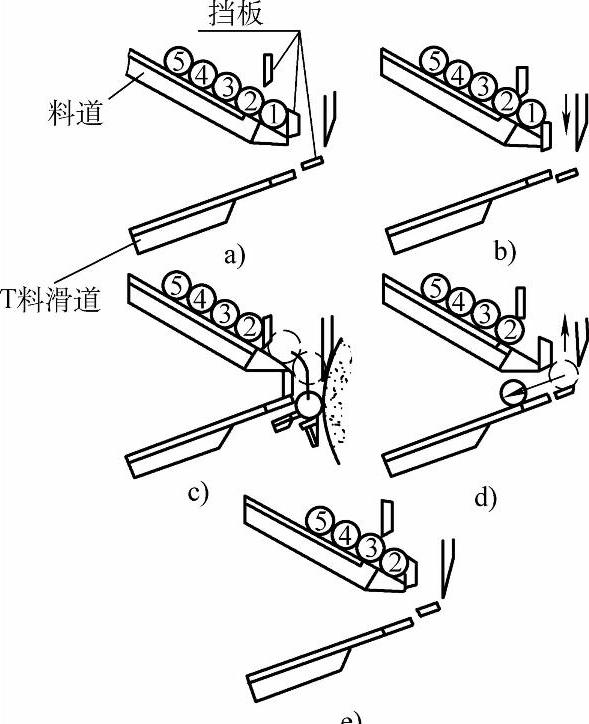
图7-40 下落式自动装料器动作顺序
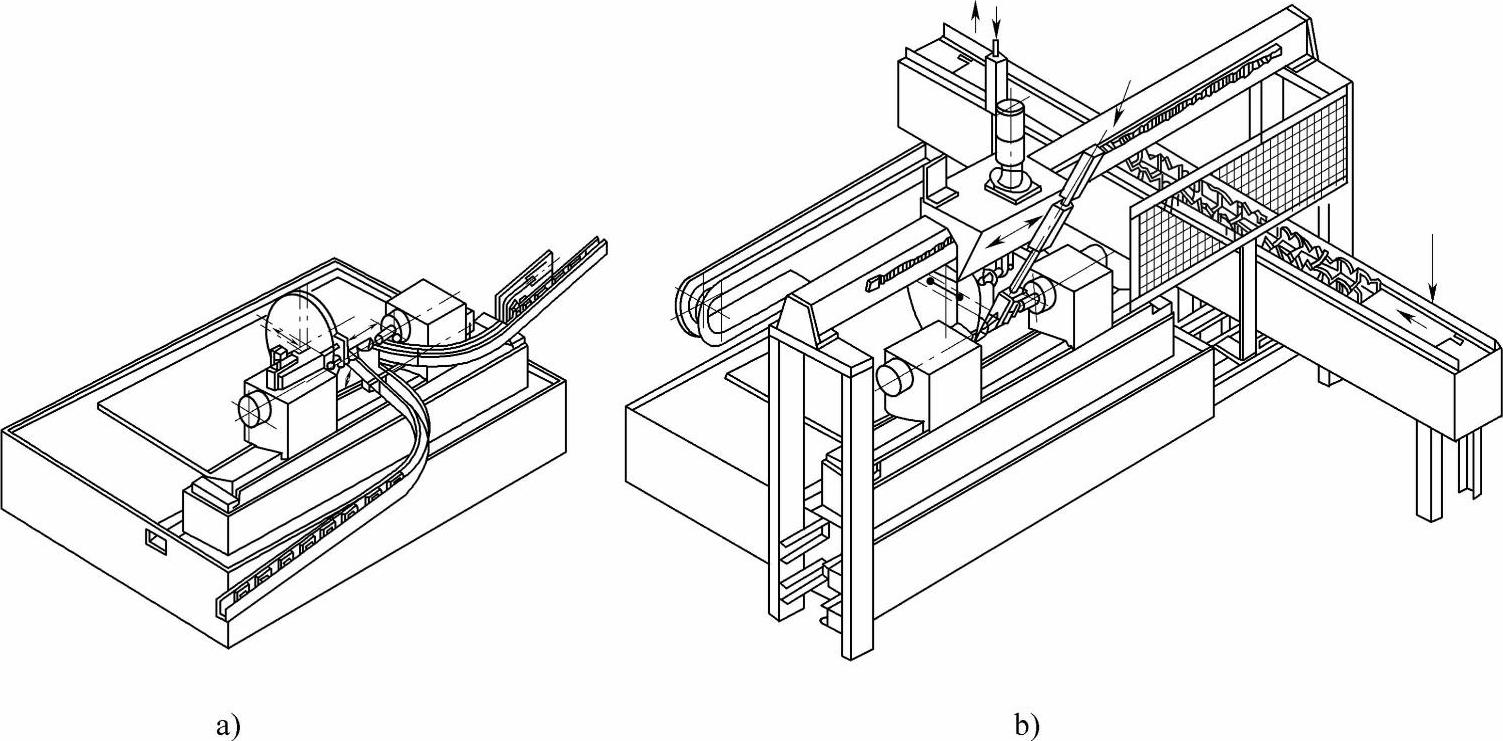
图7-41 上下料机构
a)带滑道的上料机构 b)带横梁、移动架的下料机构
机器人的基本特性参数是工作空间、运动自由度、有效负载、运动精度、运动特性等。目前工业机器人常有4个到6个运动自由度。按机器人主连杆的运动特点,分为直角坐标型、圆柱坐标型、球坐标型和关节型四大类(图7-44)。机器人的运动方式分为直线运动(代号P)和旋转运动(代号R)。比如RPRR型表示了从基身开始到臂端,关节的运动为旋转、直线、旋转、旋转。直角坐标型由三个直线运动组成,结构简单。圆柱坐标型则由于基身的转动,故它的工作空间较大。球型由两个转动坐标和一个直线坐标组成,工作空间更大。关节型机器人的结构最接近人的手臂,工作灵活。
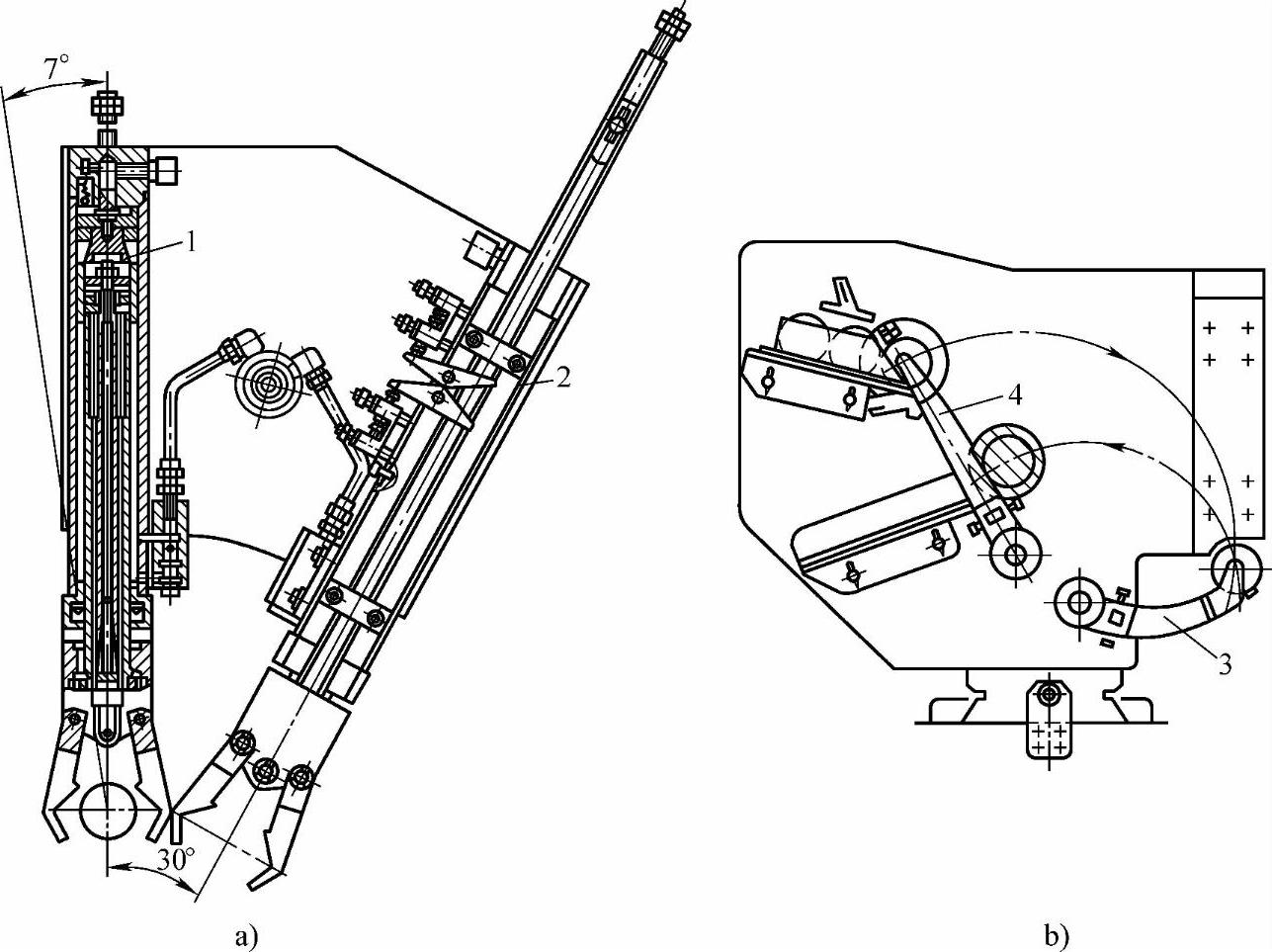
图7-42 双臂机械手
a)斜置式机械手 b)回转式机械手(https://www.xing528.com)
1、2—机械手 3、4—转臂
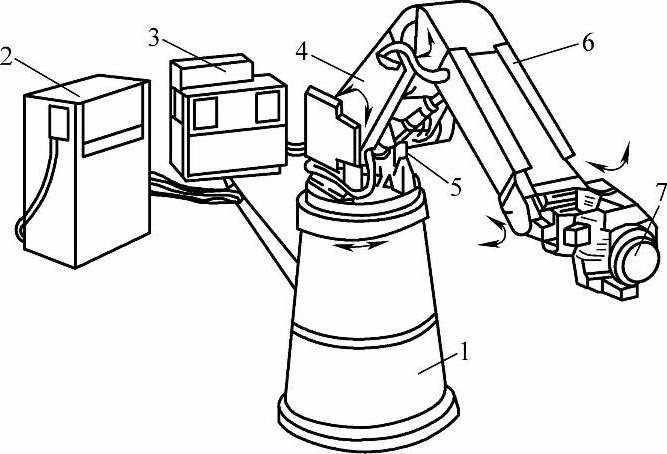
图7-43 工业机器人的组成
1—机身 2—控制系统 3—驱动系统 4—上臂 5—腰部 6—前臂 7—腕
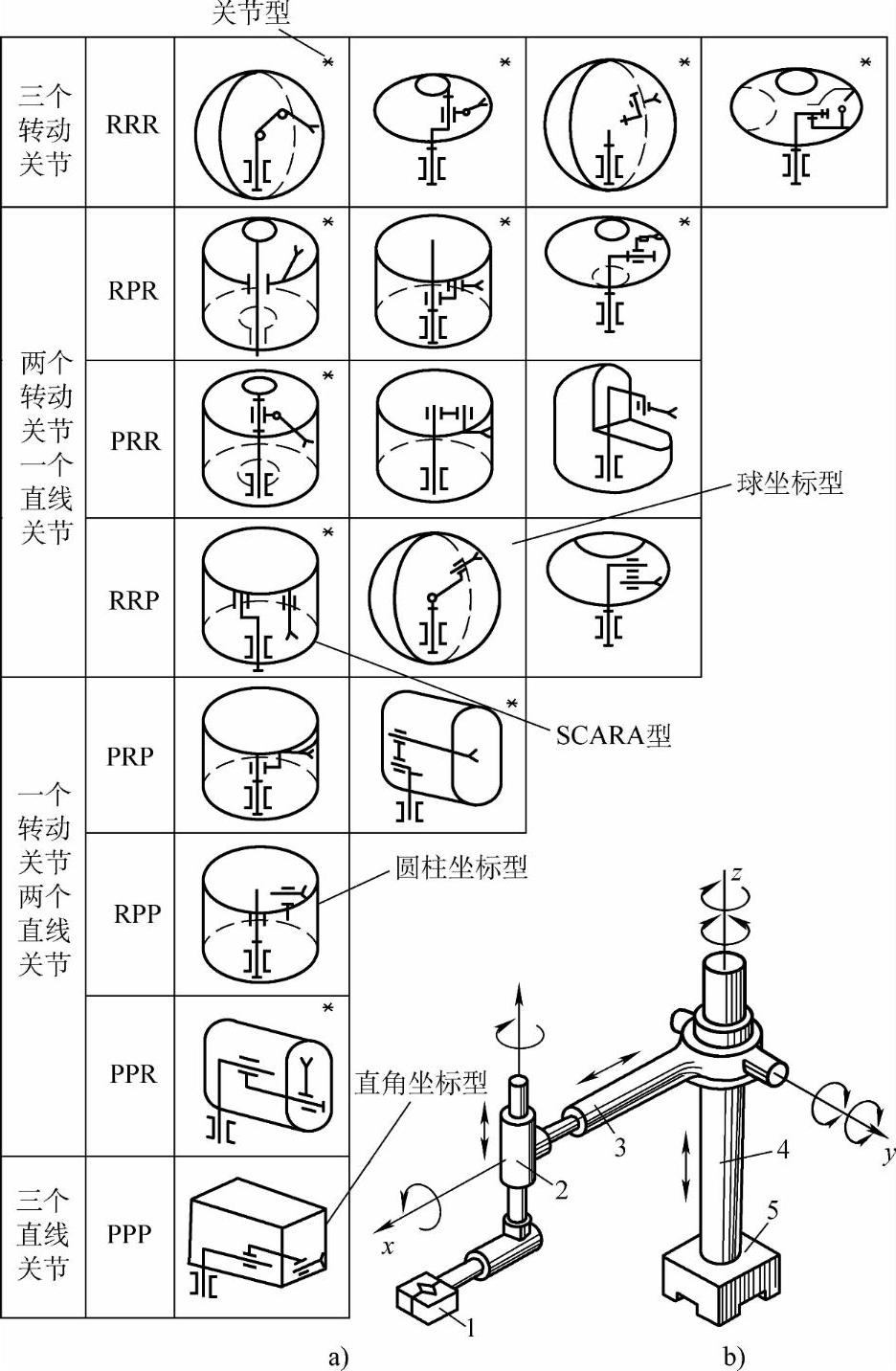
图7-44 机器人的分类及示例
a)机器人的分类 b)示例
1—手指 2—腕 3—手臂 4—柱 5—基座
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。