



系统变量可以分为几个部分(以三轴立式铣床为例说明):
1)读取加工平面参数数据——选择G17、G18、G19。
$P_GG[6]=1(当前所选平面为G17)。
$P_GG[6]=2(当前所选平面为G18)。
$P_GG[6]=3(当前所选平面为G19)。
SINUMERIK数控系统强调加工平面的概念,不仅是指出当前加工的平面位置,也包括了数控系统对坐标系其他概念的描述。例如,G17平面指XY平面,半径长度在XY平面中,同时也指明刀具轴是Z轴,包括指明刀具长度1指的是在Z轴方向的长度。同理,G18平面指ZX平面,半径长度在ZX平面中,(三轴立式铣床中)刀具轴仍是Z轴,但G18平面中的长度1指的是在Y轴方向的长度。
2)读取在机床坐标系(MCS)中的(轴)位置数据指令。
机床坐标系中X轴的当前坐标值:$AA_IM[X]。
机床坐标系中Y轴的当前坐标值:$AA_IM[Y]。
机床坐标系中Z轴的当前坐标值:$AA_IM[Z]。
机床坐标系中A轴的当前坐标值:$AA_IM[A]。
例1
R1=$AA_IM[X]
R2=$AA_IM[Y]
R3=$AA_IM[Z]
R4=$AA_IM[A]
运行上述指令后,可在系统“OFFSET”功能区的“R参数”界面中看到机床各个坐标轴的当前位置数据。
3)读取在工件坐标系(WCS)位置的数据值指令。
工件坐标系中X轴的当前坐标值:$AA_IW[X]。
工件坐标系中Y轴的当前坐标值:$AA_IW[Y]。
工件坐标系中Z轴的当前坐标值:$AA_IW[Z]。
工件坐标系中A轴的当前坐标值:$AA_IW[A]。
4)读取在基准坐标系(BCS)位置的数据值指令。
工件坐标系中X轴的基本坐标值:$AA_IB[X]。
工件坐标系中Y轴的基本坐标值:$AA_IB[Y]。(https://www.xing528.com)
工件坐标系中Z轴的基本坐标值:$AA_IB[Z]。
工件坐标系中A轴的基本坐标值:$AA_IB[A]。
5)读写可设定的零点偏移指令。
读取或写入可设定的零点偏移(工件坐标系原点)的数据值指令(不含扩展零点偏移地址)见表6-3。
表6-3 读取或写入可设定的零点偏移的数据值指令
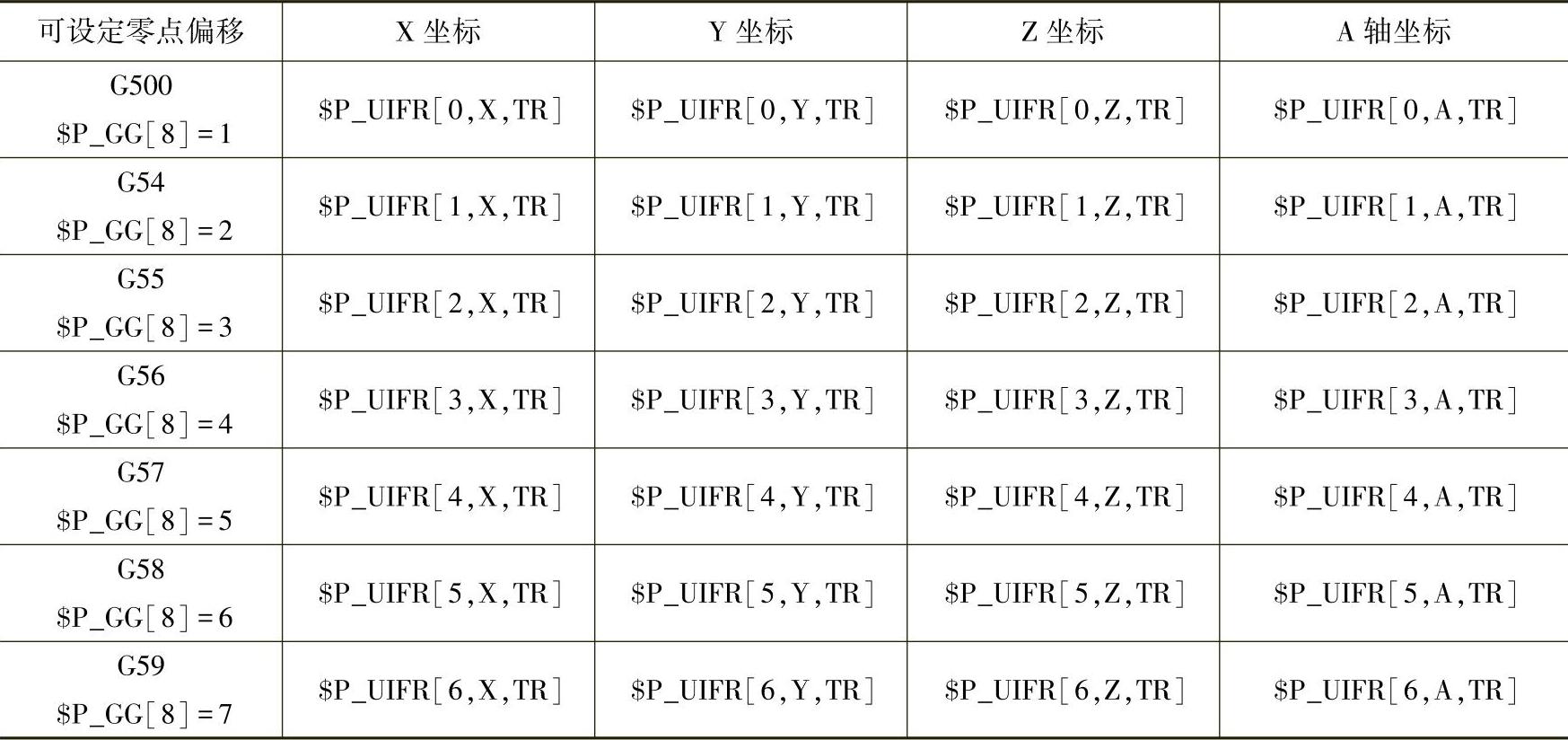
注:$P_UIFR[0,,TR]变量在程序运行中是生效的,但是程序结束或复位之后就被清除了。
例2 读取G55中Y偏移值到计算参数R8中。
R8=$P_UIFR[2,Y,TR]
例3 要设定(写入)G54中的X偏移值R1=-70、Y轴的偏移值R2=-50、Z轴的偏移值R3=-30、A轴的偏移值R4=120°,具体编程指令如下:
$P_UIFR[1,X,TR]=-70
$P_UIFR[1,Y,TR]=-50
$P_UIFR[1,Z,TR]=-30
$P_UIFR[1,A,TR]=120
或者用下面的指令写入:
$P_UIFR[1]=CTRANS(X,R1,Y,R2,Z,R3,A,R4)
运行上述指令后,可在系统“OFFSET”功能区的“零点偏移”界面中的G54一栏中看到以上数据。
6)读取程序运行后的设定点编程值指令。
工件坐标系中X轴的基本坐标值:$P_EP[X]。
工件坐标系中Y轴的基本坐标值:$P_EP[Y]。
工件坐标系中Z轴的基本坐标值:$P_EP[Z]。
工件坐标系中A轴的基本坐标值:$P_EP[A]。
例4 R4=$P_EP[X]。
运行上述指令后,可在系统“OFFSET”功能区的“R参数”界面中看到程序上一次运行后的最后一个X轴编程值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。