



(1)指令功能 关于加速模式的编程有下列零件程序指令可供使用:
1)BRISK,BRISKA:单轴或轨迹轴以最大加速度运行,直至达到编程的进给速度(无急动限制的加速)。
2)SOFT,SOFTA:单轴或轨迹轴以稳定的加速度运行,直至达到编程的进给速度(有急动限制的加速),如图5-18所示。
3)DRIVE,DRIVEA:单轴或轨迹轴以最大加速度运行,直至达到所设置的速度极限(机床数据设置)。此后降低加速度(机床数据设置),直至达到编程的进给速度,如图5-19所示。
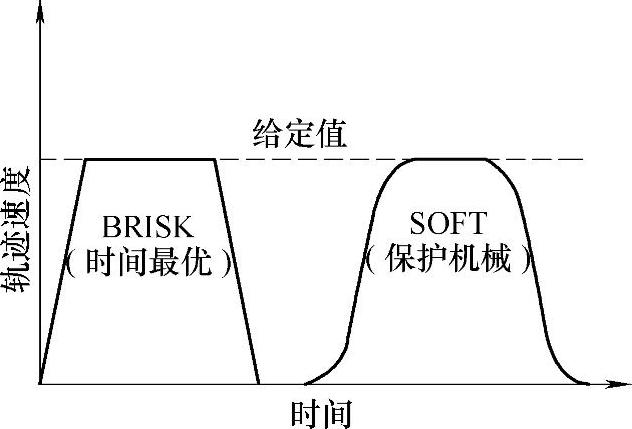
图5-18 在BRISK和SOFT时轨迹速度的走势

图5-19 在DRIVE时轨迹速度的走势
(2)编程格式
BRISK
BRISKA(<轴1>,<轴2>,…)
SOFT
SOFTA(<轴1>,<轴2>,…)
DRIVE
DRIVEA(<轴1>,<轴2>,…)
(3)指令参数说明
BRISK:用于激活轨迹轴“无急动限制的加速”的指令。
BRISKA:用于激活单轴运行(JOG,JOG/INC,定位轴,摆动轴等)“无急动限制的加速”的指令。
SOFT:用于激活轨迹轴“有急动限制的加速”的指令。(https://www.xing528.com)
SOFTA:用于激活单轴运行(JOG,JOG/INC,定位轴,摆动轴等)“有急动限制的加速”的指令。
DRIVE:超出速度上限(MD35220 $MA_ACCEL_REDUCTION_SPEED_POIN T)时,激活轨迹轴降低加速度指令。
DRIVEA:超出设置的速度上限(MD35220 $MA_ACCEL_REDUCTION_SPEED_POIN T)时,激活单轴运行(JOG,JOG/INC,定位轴,摆动轴等)降低加速度指令。
(<轴1>,<轴2>,…):调用的加速模式适用的单轴。
如果加工时在一个零件程序中变换加速模式(BRISK,SOFT),则在连续路径运行时也会在程序段结束的过渡处使用准停来更换程序段。
(4)编程示例
例1 SOFT和BRISKA。
程序代码
N10 G1 X...Y...F900 SOFT
N20 BRISKA(AX5,AX6)
…
例2 DRIVE和DRIVEA。
程序代码
N05 DRIVE
N10 G1 X...Y...F1000
N20 DRIVEA(AX4,AX6)
…
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。