



在当前加工平面G17、G18或G19平面执行坐标系旋转(ROT/AROT),值为RPL=…,单位为(°);也可以使工件坐标系绕着指定的几何轴X、Y或Z作空间旋转。使用坐标系旋转功能之后,会根据旋转角度建立一个当前坐标系,新输入的尺寸均为此坐标系中的尺寸。这样可以使得倾斜的表面或工件的轮廓在一次设置中被加工出来。
(1)平面坐标系旋转
1)编程指令格式
ROTRPL=… ;绝对旋转指令,在独立的程序段内编程
AROTRPL=… ;增量旋转指令(附加的坐标系旋转指令),在独立的程序段内编程
ROT ;取消编程旋转功能,删除以前所有激活的FNAME指令
2)指令参数说明。ROT为绝对可编程零位旋转,参照G54~G59设定当前有效坐标系的原点。
AROT为附加可编程零位旋转,即在当前有效的可设置或可编程的零点的相对旋转,也就是在原有坐标系的基础上进行叠加。
RPL为旋转角度,单位为(°)。旋转方向:沿着坐标轴的正方向看过去,沿逆时针旋转为正方向,顺时针旋转为负方向,如图3-44所示。
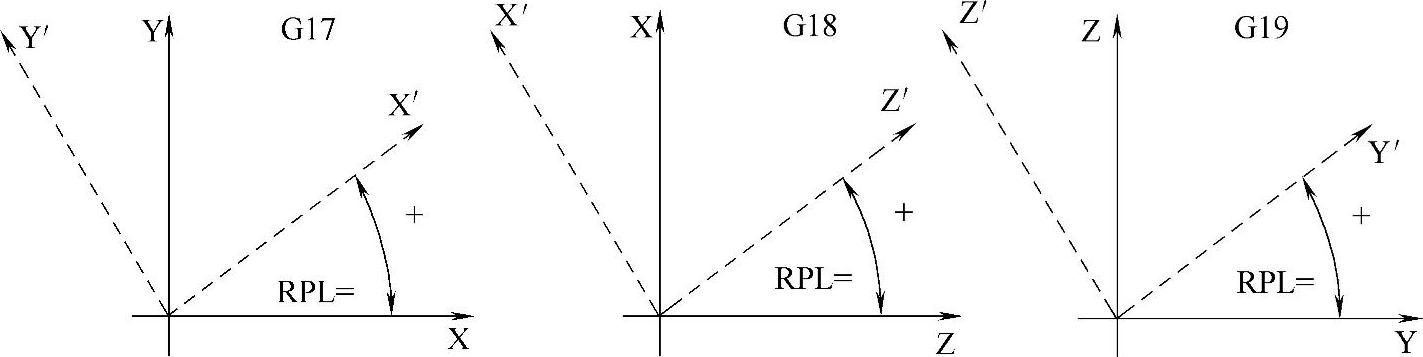
图3-44 平面坐标系旋转
(2)绕垂直轴在平面内旋转
1)编程指令格式
ROT X、Y、Z ;沿指定轴旋转指令
AROT X、Y、Z ;沿指定轴附加旋转指令(https://www.xing528.com)
ROT ;取消旋转功能,删除以前所有激活的FNAME指令
2)指令参数说明。X、Y、Z旋转角度时,参照的坐标轴正号表示逆时针旋转。
旋转次序:可以在一个程序段中同时旋转三根坐标轴。旋转次序为围绕第三几何轴Z旋转;围绕第二几何轴Y旋转;围绕第一几何轴X旋转。如果只需要旋转两根轴,第三轴的参数(值为零)可以省略。如果想自己分别定义旋转次序,可以用AROT指令为每一个轴进行编程。
取值范围:围绕第一几何轴旋转:-180°~+180°;
围绕第二几何轴旋转:-89.999°~+90°;
围绕第三几何轴旋转:-180°~+180°。
如果取值范围超过以上范围将由数控系统自动规范在以上范围内。
平面的改变如果在旋转坐标系后想改变平面,一般是要在改变平面前先取消旋转。
(3)编程示例 编程示例如图3-45所示。图中显示以Y轴为旋转轴,Z、X平面绕Y轴旋转30°。
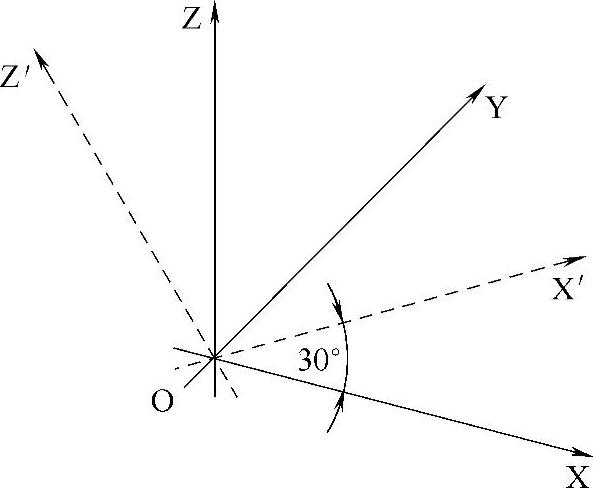
图3-45 坐标轴旋转示例
应用程序如下:
ROT Y30 ;加工坐标系以Y轴为基准旋转30°
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。