



如5.5.2节所述,漫游成功的关键是找到一条合适的漫游路径,可采用血管腔轴线作为漫游路径。模拟支架植入模块主要包括支架漫游到血管内的病变位置、球囊撑开支架、球囊放气和球囊装置撤出血管四个部分。
(1)支架的漫游
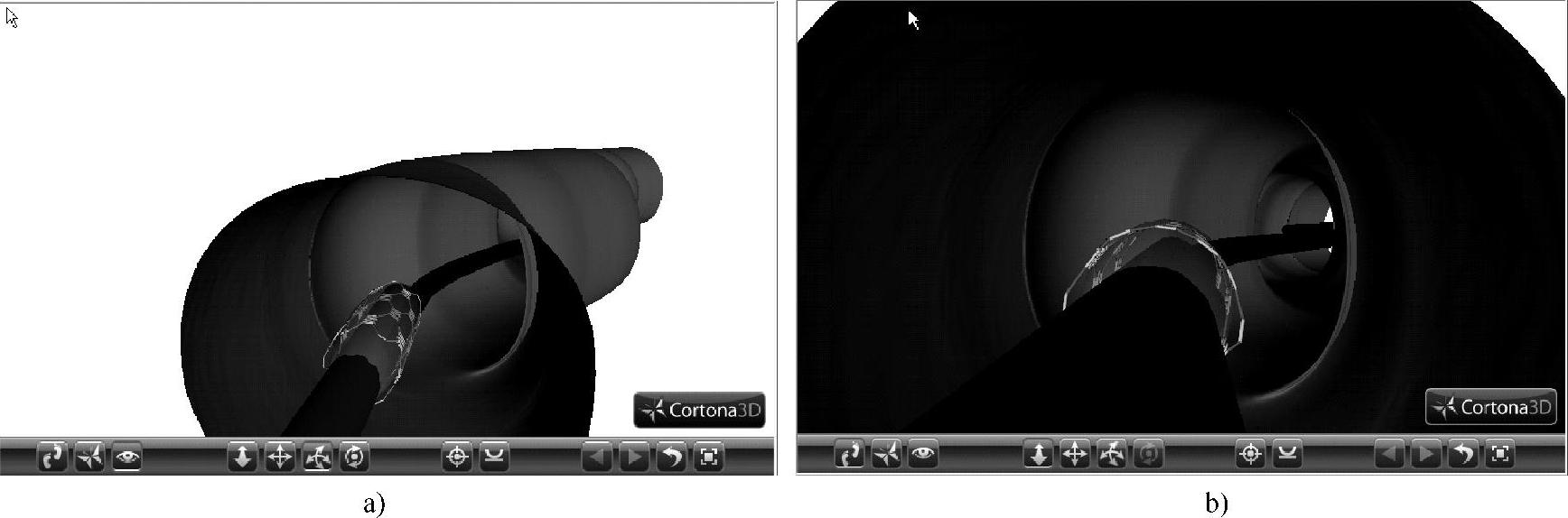
根据虚拟内窥镜漫游方式的不同,模拟支架植入系统分为自动漫游植入和手动漫游植入两种方式。自动漫游的实现思想是场景固定,通过改变替身视点的位置来实现所见场景内容的变化。相对而言,手动漫游的实现要比自动漫游简单,不需要时间感知器的控制,而是由操作者对视点直接进行控制。操作者每单击浏览器界面上向右箭头一次,观察视野就移动到漫游路径上的下一个视点处。如此操作者就可以自由地控制观察速度,还可以依次返回到已观察过的上一个视点处。图5-25为按照漫游视点序列的顺序,截取的血管内支架及其输送设备在血管腔内自动漫游过程中的几帧图像。漫游中可以进行漫游速度的设置,调整漫游画面显示的快慢。
(2)支架的后续处理
支架漫游到血管腔内合适的位置后,还需球囊撑开支架、球囊放气、撤出球囊和撤出导丝等步骤来最终完成支架植入手术的模拟。图5-26是支架漫游到血管内的目标位置后的截图画面,图中有四个按钮“expand”、“deflate”、“remo ball”和“remo wire”,分别代表球囊撑开支架、球囊放气、撤出球囊和撤出导丝。单击“expand”按钮,其对应的感知传感器打开继而触发时钟开始工作,通过路由语句使气囊压迫支架沿着位置插值器上的路径开始膨胀直到支架与血管壁接触;同理,单击“deflate”按钮,球囊开始放气,直到回到膨胀之前的状态;单击“remo ball”和“remo wire”按钮分别使球囊装置和导丝沿着漫游进来的路径撤出血管之外。图5-27分别是这几个状态的截图,最后支架被放置在血管内合适的位置。在支架上设置平面传感器(planeSensor)和球体传感器(sphereSensor),通过设置这两个传感器内的位置区间节点,还可以对支架的位置进行微调,直到状态最合适为止。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-25 虚拟支架植入过程观察结果
a)视角1 b)视角2
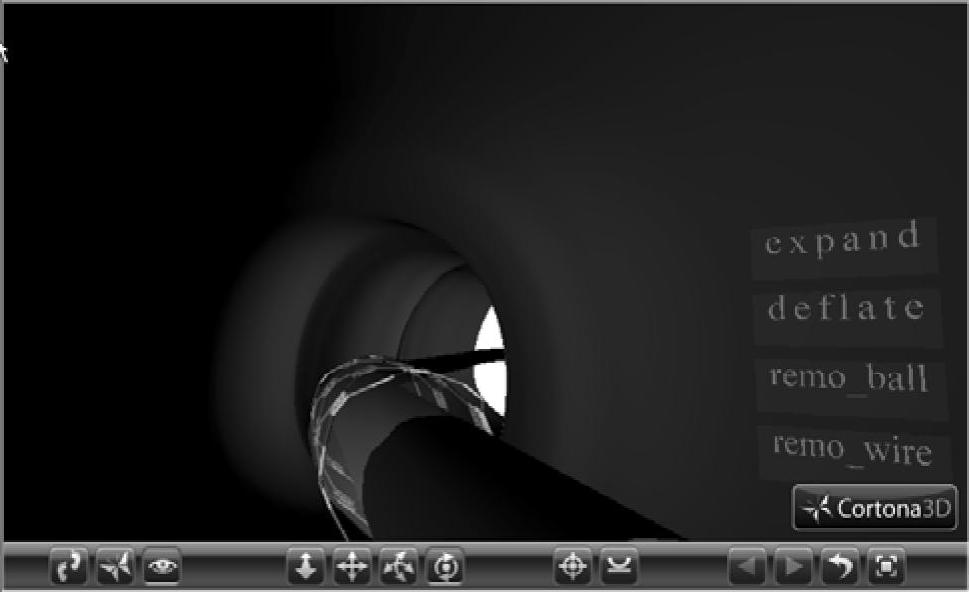
图5-26 支架在血管内的最终位置截图[51]
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。