



确定各帧IVUS图像的轴向位置后,需解决两个问题:一是确定相邻帧IVUS图像之间的相对方向;二是确定各帧IVUS图像的绝对方向。
确定相邻帧IVUS图像之间的相对方向,也就是考虑导管在回撤过程中的扭转问题[90]。当导管的3-D回撤路径不是平面曲线时,例如,图3-87所示为沿着一个立方体边沿的回撤轨迹,A和B点分别表示回撤路径的起点和终点,路径上的箭头表示在该点采集到的超声图像的方向,也即导管在该点所在平面的法线方向。显然当导管从一个平面进入另一个平面时,超声图像的方向就会发生变化。而且,当导管分别沿实线和虚线表示的两条路径回撤时,尽管起点和终点相同,但所采集的超声图像的方向是不同的。对于实线轨迹,在A和B处的方向正好相差180°;而虚线轨迹的起点和终点处的方向是相同的。如果在重建过程中没有考虑此问题,则可能造成实际的斑块在血管弯曲处的外侧,而重建出的斑块位于弯曲处内侧的现象,这两种情况下的血液动力学特性是完全不同的。
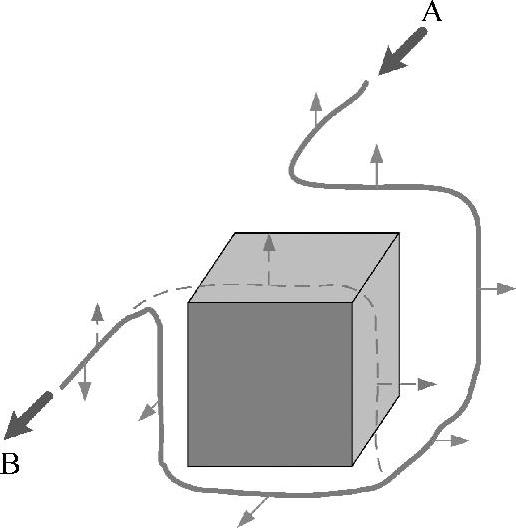
图3-87 沿着一个立方体边沿回撤轨迹
计算导管路径上各帧IVUS图像采集点处的切矢、主法矢和副法矢,建立该点处的局部坐标系。设曲线R(s)(0≤s≤1)是用三次B样条曲线表示的三维导管路径,由曲线方程可求出曲线上任意一点R(si)处的单位切矢t、单位主法矢n和单位副法矢b,三个矢量构成该点处的Frenet-Serret标架,即局部坐标系,如图3-88所示。沿三维导管路径,在各帧IVUS图像采集点处均建立局部坐标系,即可确定各帧IVUS图像的初始方位。
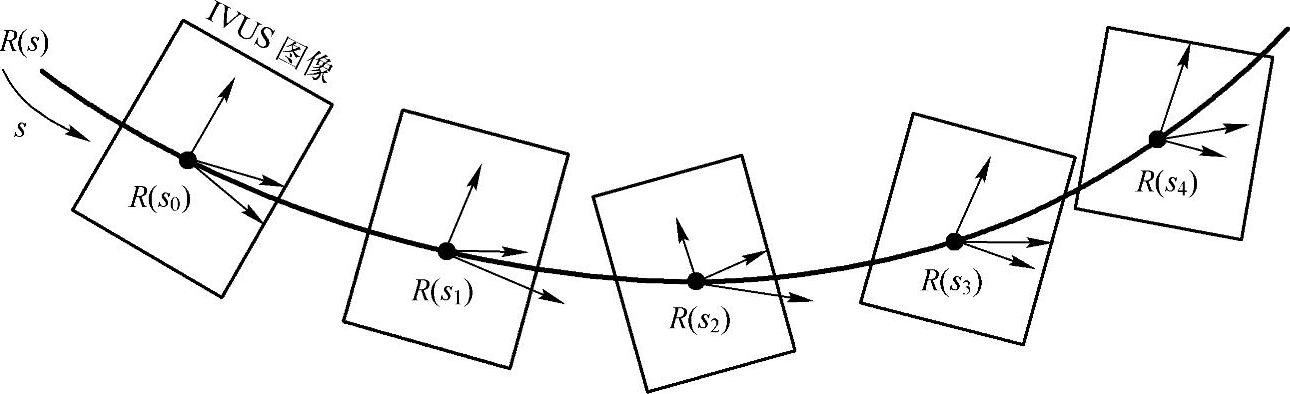
图3-88 三维导管路径上各帧IVUS图像采集点处的局部坐标系
图3-89a所示为屏幕坐标系,它以左上角为坐标原点,X′轴正向向右,Y′轴正向向下;图3-89b所示的投影平面坐标系以图像中心为坐标原点,X轴正向向右,Y轴正向向上。设图像的大小为W×H(单位:像素),则图像平面坐标系中任一点的坐标值(x′i,y′i)转换到投影平面坐标系中为(xi,yi),其公式如下:

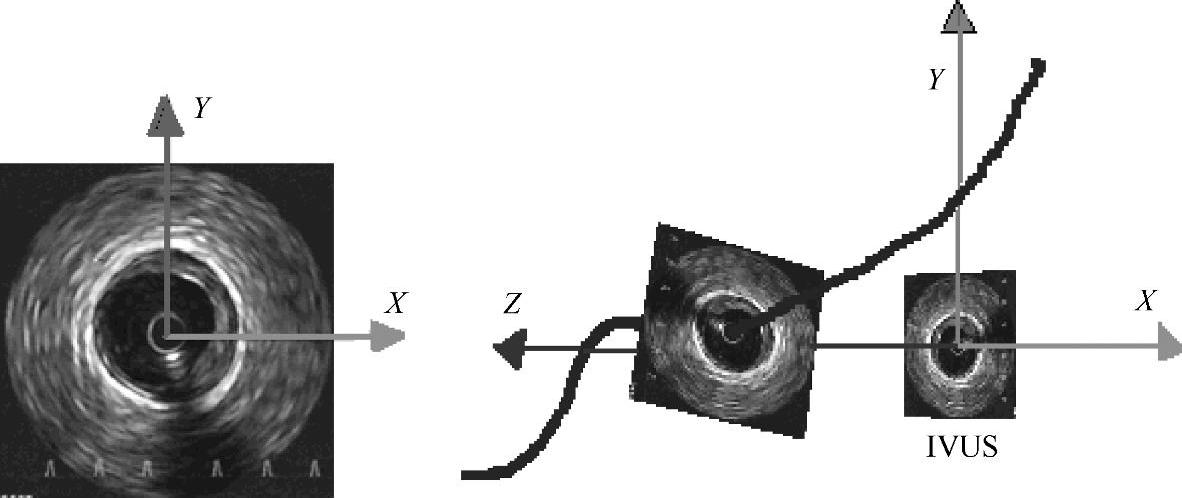
临床采集的IVUS图像是按照图像平面坐标系存储的,各帧超声图像均以导管为中心,且垂直于导管路径在该帧图像采集点处的切矢量,因此对于各帧超声图像,需先由式(3-79)的坐标转换关系,将图像中像素点的坐标转换到投影平面坐标系中,然后再映射到在导管路径相应位置处建立的局部坐标系,即Frenet-Serret标架中,如图3-90所示。由于各帧IVUS图像均垂直于导管路径,即垂直于导管路径在该帧图像采集点处的切矢量,因此应将IVUS切片映射到导管路径在该点处的法平面(即由单位主法矢和单位副法矢构成的平面)上。基于此原因,对于在导管路径上各帧图像采集点处建立的Frenet-Serret标架(局部坐标系),以单位主法矢为X轴,单位副法矢为Y轴,单位切矢为Z轴,然后根据坐标变换原理,将各帧超声图像中像素点的坐标(基于投影平面坐标系)变换到相应的局部坐标系中。
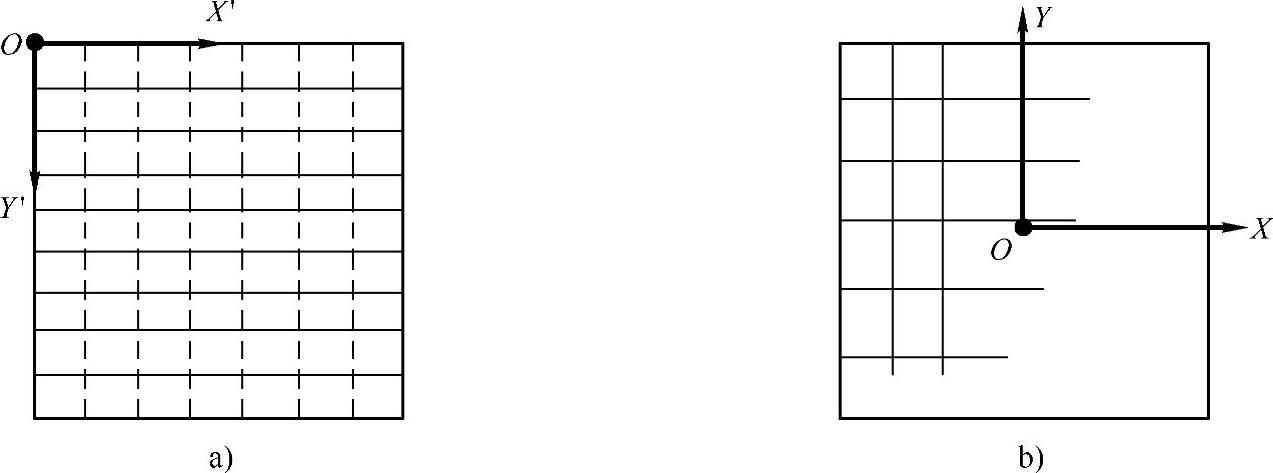
图3-89 图像平面和投影平面坐标系示意图
a)图像平面坐标系 b)投影平面坐标系
 (https://www.xing528.com)
(https://www.xing528.com)
图3-90 IVUS图像的坐标变换
对于确定各帧IVUS图像的绝对方向,在研究早期,文献[80]提出采用解剖学标志(如血管分叉点)确定各帧图像旋转角的方法,显然有时很难在造影中清晰地识别出此类标志点。在IVUS图像中,导管位于图像的中心,并且一般不与管腔轮廓的重心重合,二者之间存在一定的偏移量[91],如图3-91所示。导管路径、血管中心线和超声图像轴向位置示意图如图3-92所示,从造影图像中三维重建出的血管腔轴线与IVUS图像平面的交点也不与IVUS图像中的管腔轮廓重心重合。各帧超声图像在垂直于导管的平面内可自由旋转。文献[81,88]利用上述两种偏心信息,以IVUS图像中心作为参考点,分别计算图像中的管腔轮廓重心和从造影中重建出的管腔椭圆轮廓中心与参考点之间的偏心向量,以及两个偏心向量之间的夹角,即偏心角,如图3-93所示;然后,通过对全部ICUS图像的偏心角加权和进行优化,计算出一个校正偏心角,并将其应用于各帧IVUS图像,得到沿超声导管路径准确排列的各帧IVUS图像,如图3-94所示。
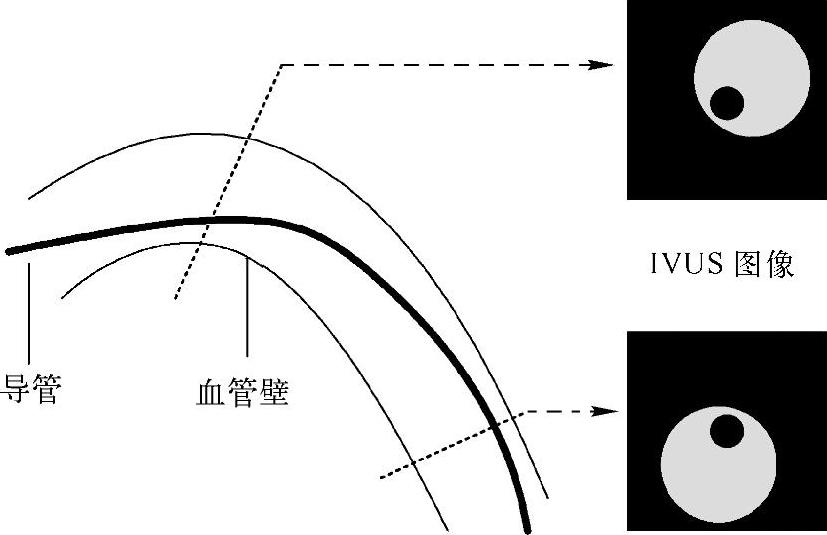
图3-91 导管的偏心示意图[91]
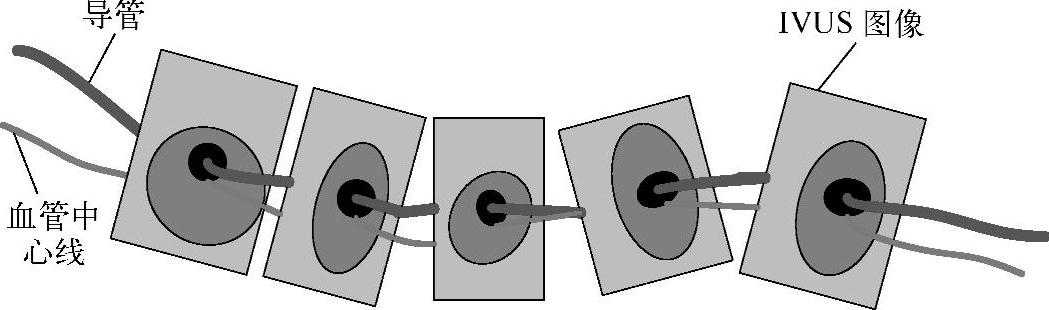
图3-92 导管路径、血管中心线和超声图像轴向位置示意图
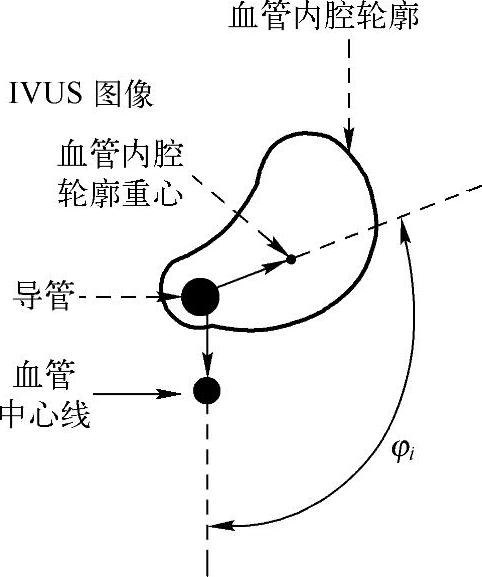
图3-93 IVUS图像平面内的偏心向量与偏心夹角[88]
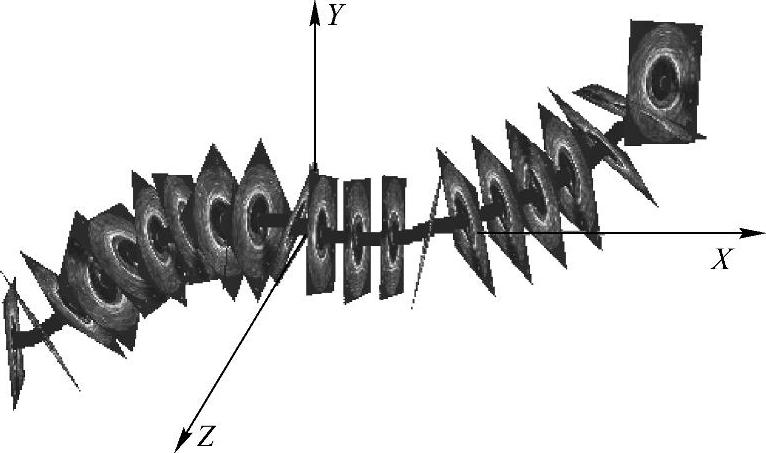
图3-94 沿三维导管路径准确排列的各帧IVUS图像
文献[82]采用投影法确定IVUS图像的绝对方向,即计算重建出的内腔表面的投影轮廓,与造影图像进行定量比较,在不同初始角度时测量投影轮廓采样点处导管与管腔边界之间的距离,并分别与从造影中测得的距离进行对比,利用线性回归分析法得到最大正相关的最优旋转角。文献[92]将三维管腔投影到二维造影图像上,并与造影中的管腔投影进行对比。每旋转一度,对投影边界点与对应造影边界点之间的距离求和,距离和最小时的角度即为各帧超声图像的最佳旋转角。文献[93]将采用三维弹性配准法,即将完成血管壁轮廓提取的ICUS切片垂直置于一个直导管路径上;然后采用三次B样条曲面对管腔轮廓点进行拟合,得到一个管状模型;最后将管状模型向左右造影平面反投影,将投影轮廓与造影中的管腔轮廓进行配准,通过对控制曲线的反复迭代得到全局最优解。
上述方法的主要不足在于确定各帧IVUS图像的空间方向时,以从造影图像中重建出的三维血管腔模型或造影中的管腔轮廓或轴线作为基准,采用优化的方法求得各帧IVUS图像的最优空间方向。而基于造影图像的三维重建本身就存在误差(例如,重建时一般假设管腔横截面为椭圆,而事实上当发生狭窄时管腔的形状通常复杂多样),且在反投影的过程中,可能再次引入成像系统参数的误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。