



基于图像的回顾性脱机门控方法虽然可以避免ECG门控方法的缺点,但是在获得的门控序列中,各帧可能在R-R间期的任意位置获取,同时当病人的心率发生变化时,也可能得到错误的结果。同时由于每个心动周期只选择一帧,需要抛弃大量帧,因而可能会丢失很多有诊断价值的信息。
目前,对非门控IVUS图像序列直接进行运动估计的方法包括光流法(Optical Flow,OF)和块匹配法(Block Matching,BM)。此类方法既不需要门控图像采集装置,无需记录ECG信号,也不需要抛弃有用帧,可保证图像数据集合的完整性。但是光流法的估计结果极易受到血流随机运动的干扰,且对噪声十分敏感;块匹配法需要明显的标志物(例如钙化,血管分叉等),而此类标志并非在每帧中都存在。
在综合分析ICUS图像序列中由周期性心脏运动所致运动伪影的产生机制和表现形式的基础上,可对覆盖多个心动周期的非门控IVUS图像序列直接进行运动伪影的定量估计和补偿,改善ICUS纵向视图的视觉效果,提高对ICUS图像的定量分析和三维重建等的精度。该技术无需利用ECG信号,也不需要抛弃任何一帧图像,在抑制运动伪影的同时可保证图像数据集合的完整性。下面介绍方法的主要步骤。
首先,提取各帧图像中的血管壁内膜轮廓,并定量估计相邻帧间的血管横断面刚性运动参数,如图3-79所示。相邻帧血管横截面之间的平移和旋转可分别用管腔边界曲线重心的位移和边界曲线之间的旋转角来表示。在图3-79中,假设相邻两帧中的管腔边界曲线分别为γ1和γ2,其重心分别为C1(xc1,yc1)和C2(xc2,yc2),γ1和γ2之间的位移为(Δx,Δy)=(xc2-xc1,yc2-yc1),γ1和γ2之间的旋转角为Δα,旋转中心为导管(x0,y0),即:

其中
Δα=arctanyc2/xc2()-arctanyc1/xc1 (3-72)
ICUS断层图像序列中相邻切片之间管腔横截面重心的位移和空间方向的改变主要由运动和几何两方面的因素造成:运动因素即外部因素,指由周期性心脏运动和搏动的血流造成的超声导管相对于管腔的运动和血管形态的变化;几何因素即内部因素,指血管腔本身不规则的几何形状。因此,管腔边界曲线重心的位移(Δx,Δy)和边界曲线之间的旋转角Δα分别由如下两部分组成:

其中,脚标d和g分别表示运动分量和几何分量。
对于图像序列中的各相邻帧,例如第k-1和k帧(k=2,3,…,M,M是图像序列的总帧数),计算血管内腔边界曲线的几何中心作为对其重心的近似,并计算出重心之间的刚性运动参数{Δxkk=2,3,...,M}、{Δykk=2,3,...,M}和{Δαkk=2,3,...,M}。由于由血管本身的不规则几何形状所引起的相邻帧之间管腔横截面空间方向和重心位置的变化速度,远小于由周期性心脏运动所致的变化速度,因此在刚性运动参数的高频分量对应于运动分量(Δxk,d,Δyk,d,Δαk,d),且其变化频率应等于心率,而低频分量对应于几何分量(Δxk,g,Δyk,g,Δαk,g)。分别对{Δxkk=2,3,...,M}、{Δykk=2,3,...,M}和{Δαk k=2,3,...,M}进行高通滤波,则滤波器的输出即是运动分量(Δxk,d,Δyk,d,Δαk,d)的估计值。高通滤波器的通带截止频率设定为病人的心率值。
最后,对于第k帧图像Ik(x,y)(k=2,3,…,M),将其血管区域(血管壁中-外膜轮廓和管腔轮廓之间的区域)内各像素的坐标(基于以导管中心为坐标原点的坐标系)先平移
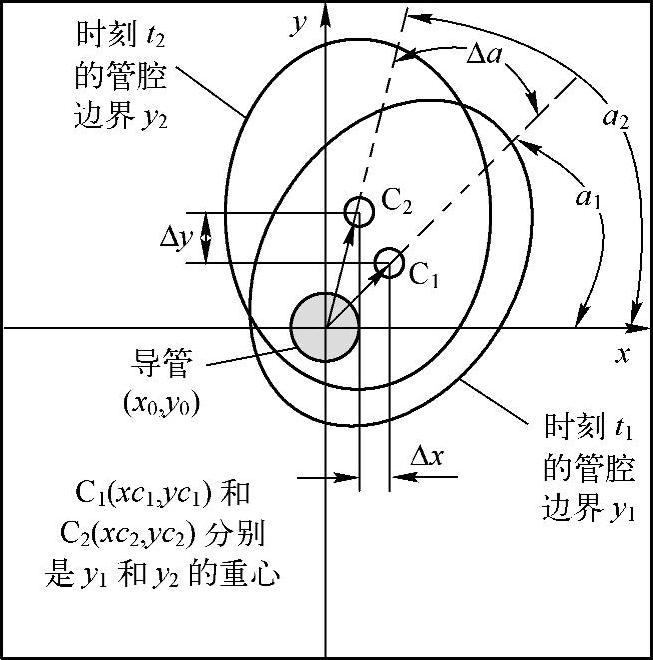
图3-79 相邻帧血管内超声图像的血管壁刚性运动参数示意图(https://www.xing528.com)
,再旋转

,即得到消除刚性运动伪影后的图像I′k(x′,y′):

图3-80和图3-81分别是对62帧和80帧临床图像序列补偿运动伪影前后的横向视图(血管腔边界曲线)及纵向视图。可以看出,完成抑制运动伪影后的横截面视图中相邻帧管腔轮廓之间的扭动大大减小,在纵向视图中体现为外膜轮廓的锯齿形边缘变的相对平滑。
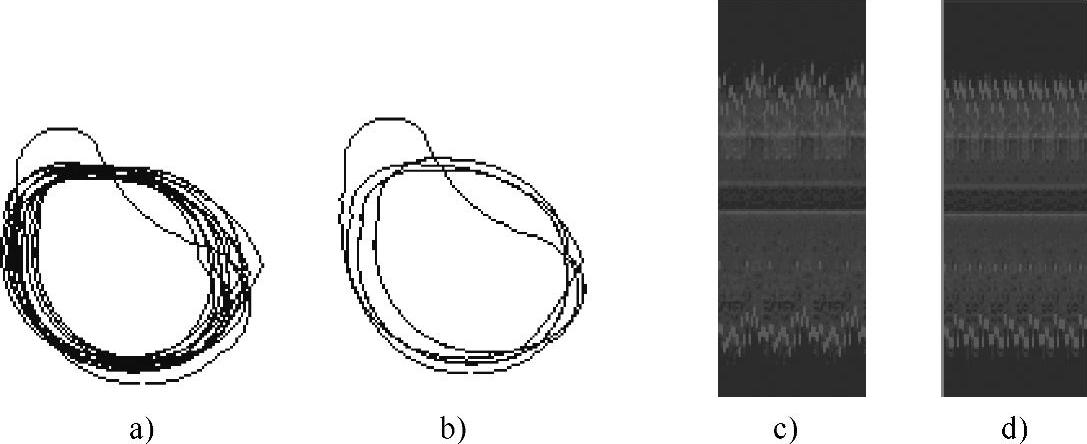
图3-80 62帧临床图像实验结果
a)补偿前横向视图中的管腔边界 b)补偿后横向视图中的管腔边界 c)补偿前的纵向视图 d)补偿后的纵向视图
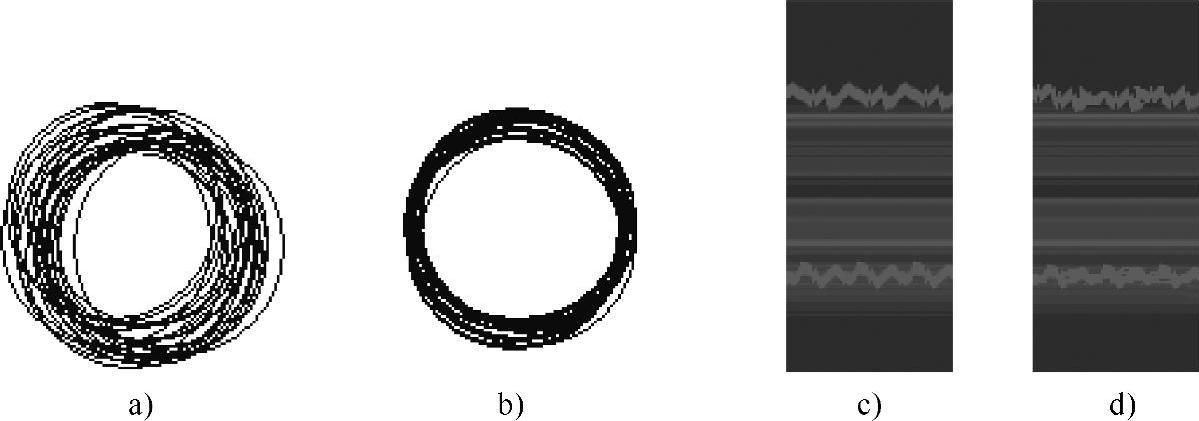
图3-81 80帧临床图像实验结果
a)补偿前横向视图中的管腔边界 b)补偿后横向视图中的管腔边界 c)补偿前的纵向视图 d)补偿后的纵向视图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。