



本节介绍一种基于snake模型的IVUS图像序列三维分割方法。在对原始图像进行滤波去噪和去除环晕伪像的预处理的前提下,首先获取IVUS序列的四个纵向视图,并从中提取出内腔和中-外膜边界;然后,将各纵向视图中的边界曲线映射到各IVUS帧中,得到各横向视图中的初始轮廓;将此初始轮廓作为snake模型的初始形状,通过使预先设定的能量函数最小,模型在内外力的共同作用下不断变形,最终得到各IVUS帧中的内腔边界和中-外膜边界,从而实现对各帧图像的并行分割。
基于snake模型的三维分割IVUS图像序列方法流程图如图3-23所示,该分割方法的步骤如下:
1)获取IVUS图像序列的四个纵向视图。
2)提取纵向视图中的内腔边界和中-外膜边界。
3)将步骤2中获得的边界曲线映射到各帧IVUS切片图像中,得到各IVUS帧的初始内腔边界和中-外膜边界。
4)在各IVUS帧中,初始轮廓演化变形,得到最终的内腔和中-外膜轮廓。
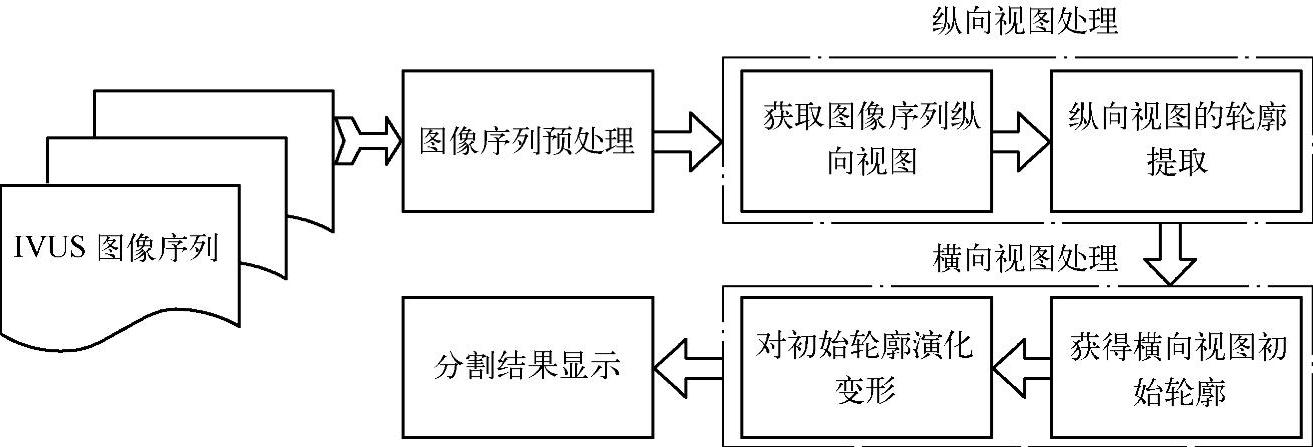
图3-23 基于snake模型的三维分割IVUS图像序列方法的流程图
(1)原始图像的预处理
首先,采用中值滤波和高斯平滑两种通用预处理方法,减少IVUS图像中的椒盐噪声和随机噪声。在IVUS成像过程中,超声导管在图像中心区域产生一个无回声暗区,围绕导管黑色影像的厚薄不一的白色环状影像称为环晕伪影(参见3.3.3节),即图3-24a中箭头所指部位。它与传感器声波振荡引起的高振幅信号有关,不是导管本身的影像,应该在预处理阶段加以去除,否则会影响图像分割的准确度。根据环晕伪影在IVUS极坐标视图中的分布特性,采用极坐标变换法对其加以去除。

图3-24 一帧IVUS图像的环晕伪影去除结果(ε=0.21)
a) 原始横向视图 b)极坐标视图 c)去除环晕伪影后的极坐标视图 d)去除环晕伪影后的横向视图
其次,对IVUS横向视图进行极坐标变换,得到其极坐标视图,如图3-24b所示。可见,环晕伪影位于极坐标视图的上部。采用阈值法,按照下式去除极坐标视图中的环晕伪影:

式中,I(r,θ)和I′(r,θ)分别为原极坐标视图和去除环晕伪影后的极坐标视图中像素点(r,θ)处的灰度值;Icatheter为原IVUS图像中导管区域的像素灰度值;r为像素点的极径;ε为权重参数,经实验确定其取值范围为[0.1,0.35];ImageHeight为以像素为单位的图像高度。
去除环晕伪影后的极坐标视图如图3-24c所示,在极坐标视图中消除环晕伪影后,再经过极坐标逆变换,即可得到直角坐标系下去除环晕伪影后的横向视图,如图3-24d所示。对4帧IVUS图像去除环晕伪影的结果如图3-25所示。
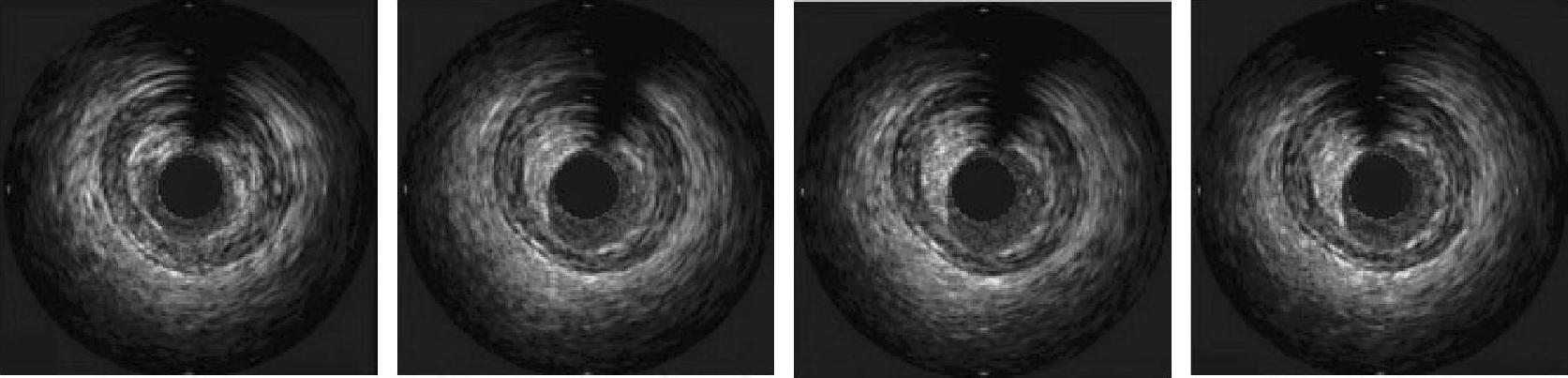
图3-25 去除环晕伪影的4帧IVUS图像
(2)获得IVUS图像序列的纵向视图
采集IVUS图像时,随着超声导管的缓慢回撤,获得的是一系列血管横截面切片图像。IVUS纵向视图是指IVUS图像序列沿平行于导管方向的纵向截面视图,如图3-26所示。沿血管长轴(纵向)方向取四个纵向视图,即垂直切面A、水平切面B、左对角线切面C和右对角线切面D。
(3)提取纵向视图中的血管壁边缘
IVUS纵向视图中的每一行像素即为一帧切片图像与该纵向视图的交线,其对应关系示意图如图3-27所示。根据纵向视图中的内腔边界和中-外膜边界的灰度同其周围像素灰度相差较大的特征,遍历纵向视图中的各像素,判断识别目标边界点。由于纵向视图中的目标边界分布于图像中部,所以从图像中轴线开始,分别向左和向右进行逐行遍历,如图3-28所示。对于当前像素(i,j),其灰度值为I(i,j),若I(i,j+1)-I(i,j)≥η,η为阈值,则为目标边界点,否则不是。将每行左右两部分的像素中,第一个符合上述条件的像素记为内腔边界点,第二个记为中-外膜边界点。经实验确定η的取值区间为[10,20]。图3-29是对图3-25所示图像序列的四个纵向视图的血管壁边缘提取结果。
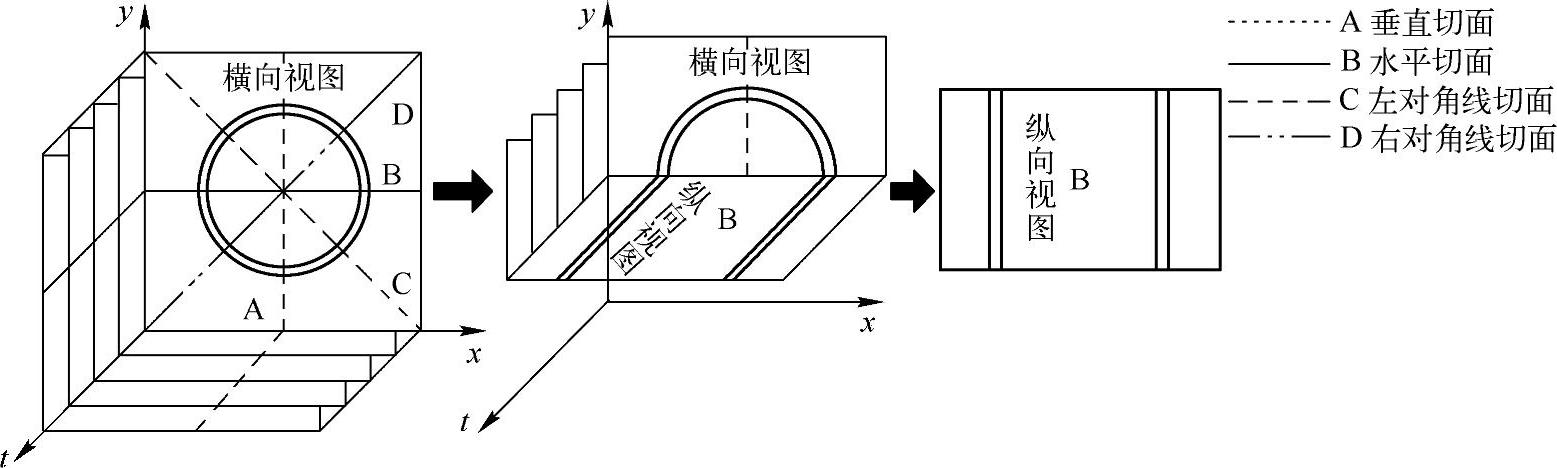
图3-26 获取IVUS纵向视图的示意图

图3-27 纵向与横向视图的对应关系示意图
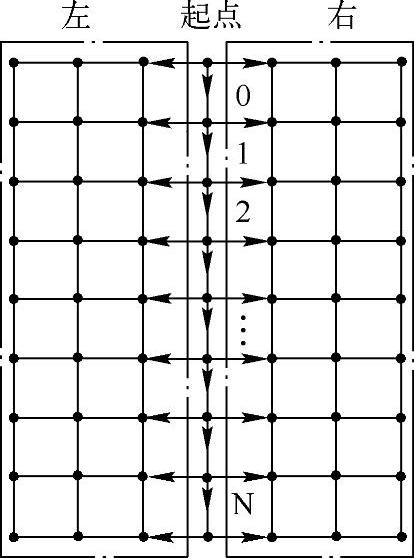
图3-28 逐行遍历纵向视图像素
 (https://www.xing528.com)
(https://www.xing528.com)
图3-29 完成管腔轮廓提取的四个纵向视图
a) 垂直切面图 b)水平切面图 c)左对角线切面图 d)右对角线切面图
(4)获取横向视图中的初始轮廓
纵向视图的轮廓线对应到横向视图中为轮廓点,四条纵向视图轮廓线映射到横向视图中为四个轮廓点,如图3-30所示。在得到各帧横向视图中的内腔和中-外膜初始边界点以后,依次连接各初始边界点,获取初始轮廓,如图3-31所示,同时获得各帧图像中的初始内腔边界和中-外膜边界。图3-32是对图3-25所示图像序列的横向视图中初始轮廓的提取结果。
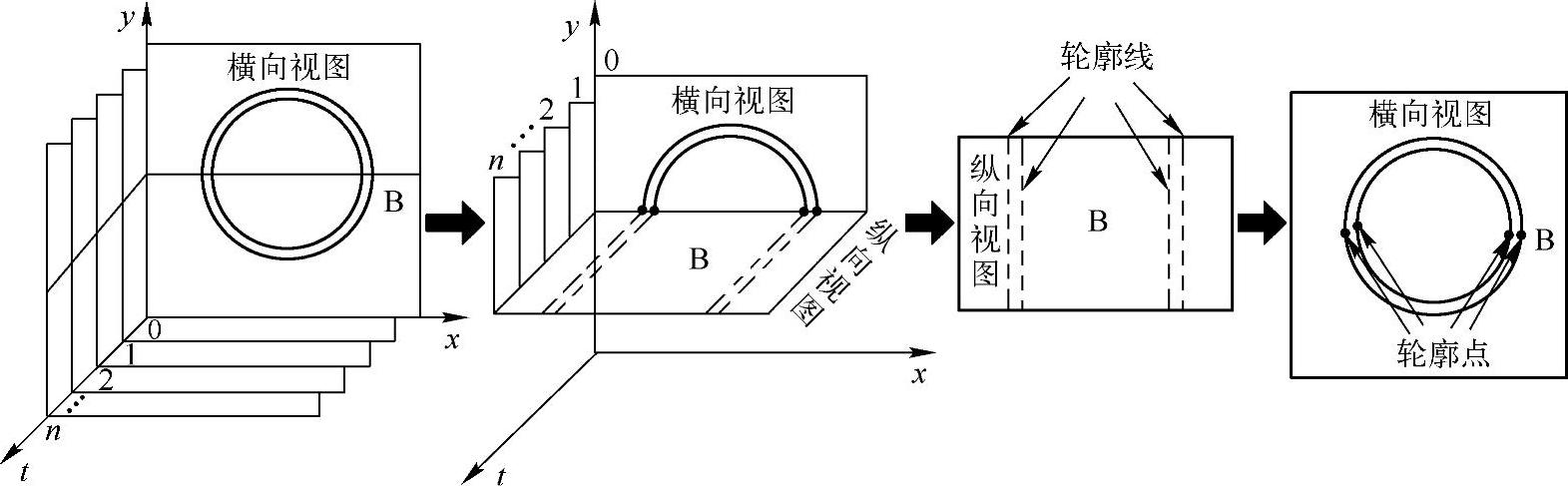
图3-30 纵向与横向视图轮廓对应关系示意图
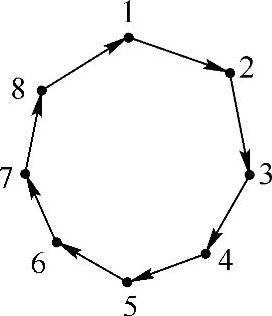
图3-31 由初始点获取初始轮廓
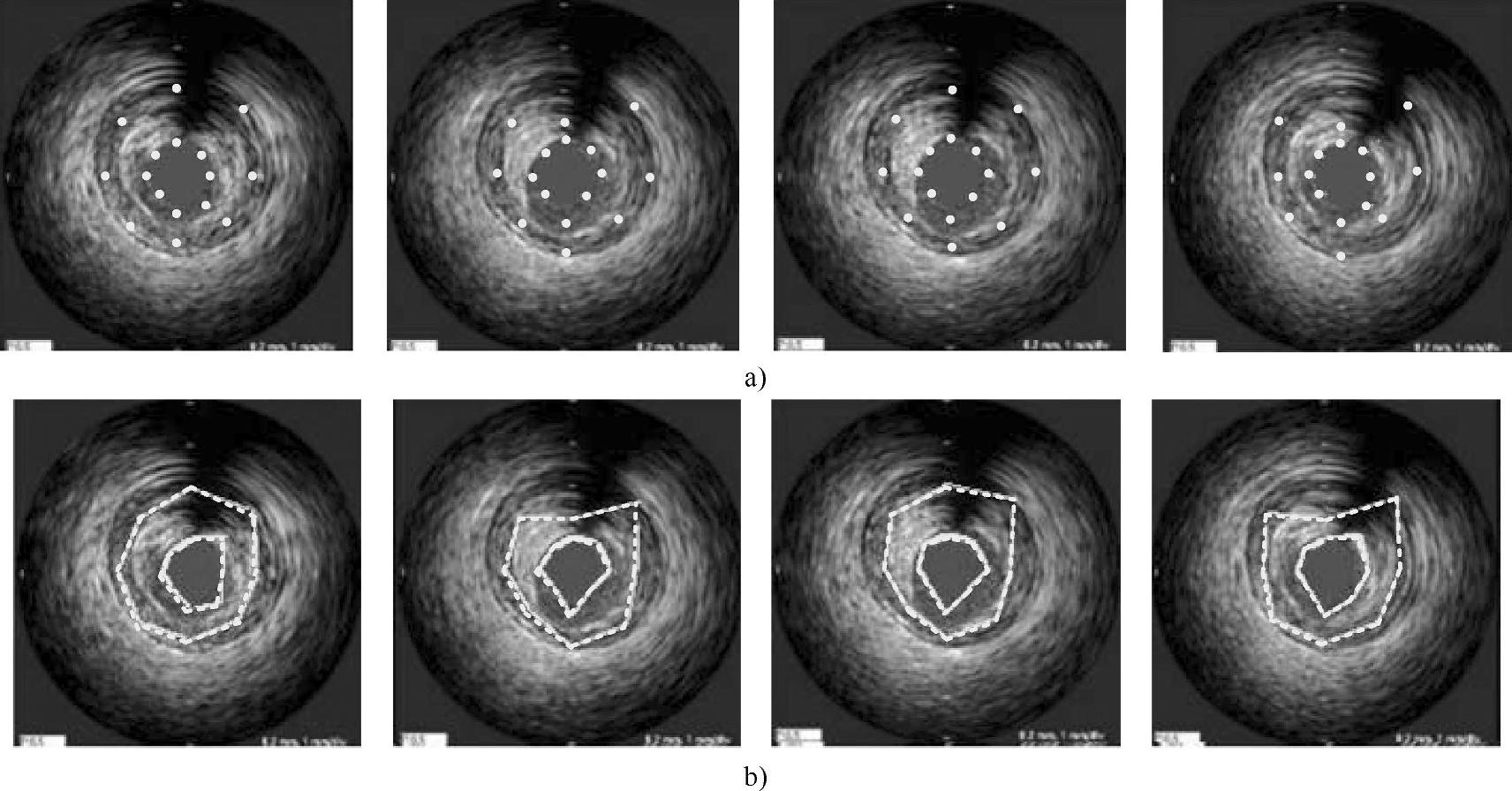
图3-32 IVUS横向视图中血管壁的初始轮廓
a) 初始轮廓点 b)初始轮廓
(5)基于snake的初始轮廓演化
将各帧IVUS图像中血管壁的初始轮廓作为snake模型的初始形状,通过使预先设定的能量函数最小,snake不断变形,当能量函数取得全局最小值时,snake模型即停留在目标轮廓处,从而完成对各帧图像中内腔和中-外膜边界的并行提取。
将初始轮廓离散成由N个点组成的有序点集,则snake能量函数的离散表达式为

式中,内部能量Eint使snake在变形过程中保持连续和平滑,其归一化表达式为

式中,ci(xi,yi)(i=1,2,…,N-2)是第i个snake点;d和maxd分别是相邻snake点之间的平均距离和最大距离,在每次迭代结束时,它们的值都被更新;α和β是权重参数。式(3-3)中的第一项保证变形过程中snake的连续性,使snake点均匀分布,不致产生收缩的现象;第二项是曲线二阶导数的离散形式,保证变形过程中snake的光滑性。由于进行了归一化,故式(3-7)中两项的取值范围都在[0,1]区间内,权重α和β的取值区间也是[0,1]。
外部能量Eext是保证snake收敛的外部力,它决定snake的移动方向,其定义为

式中,I(xi,yi)和I(xi,yi)分别是像素(xi,yi)的灰度和灰度梯度值。由于8位灰度图像的灰度和灰度梯度的取值范围分别为[0,255]和[0,2552],故对I(xi,yi)和I(xi,yi)分别进行归一化,使其取值范围为[0,1]。γ,λ∈[0,1]是权重参数。
通过使能量函数E最小,snake在内外力的共同作用下从初始形状开始不断变形,最终停留在能量函数取得全局最小值的最优位置,即为目标轮廓,如图3-33和图3-34所示,其中式(3-3)和式(3-4)中的权重参数设定为α=β=γ=λ=1,即各能量项的权重相等。
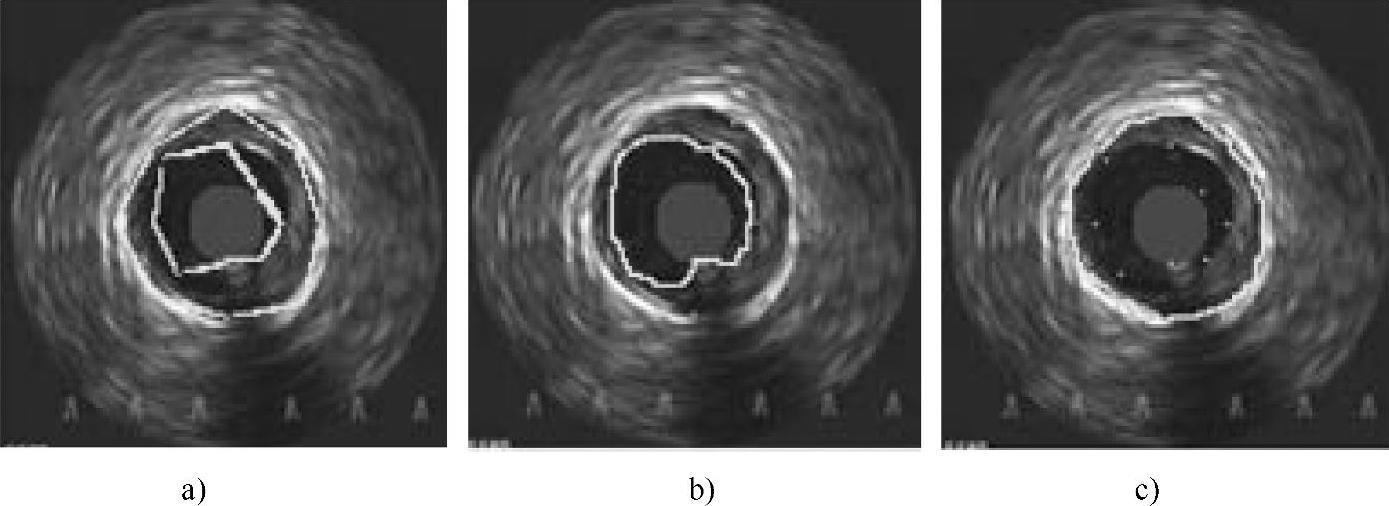
图3-33 轮廓演化结果1
a) 初始轮廓 b)内腔轮廓演化结果 c)中-外膜轮廓演化结果
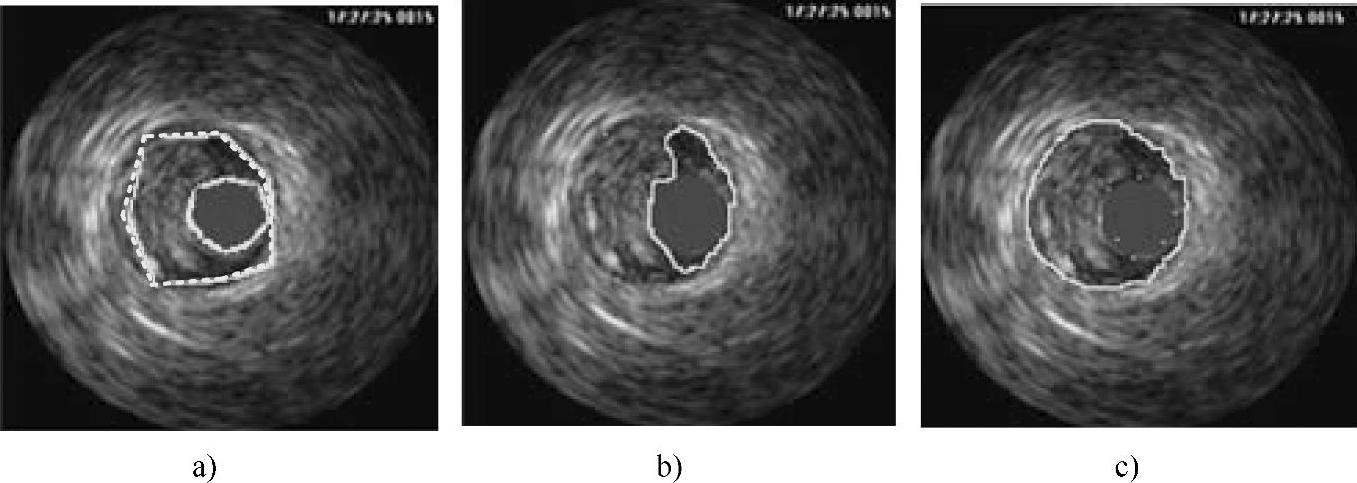
图3-34 轮廓演化结果2
a) 初始轮廓 b)内腔轮廓演化结果 c)中-外膜轮廓演化结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。