



根据两幅冠脉造影图像三维重建血管所需的参数包括:X射线源到图像平面的距离,即D1和D2,如图2-27所示,单位为mm;图像A和B的造影角度,分别表示为(α1,β1)和(α2,β2),单位为度;X射线源和系统中心之间的距离,即式(2-16)中的L1和式(2-17)中的L2,单位为mm;造影图像的像素间距q,即相邻像素的间隔距离,单位是mm。上述参数均可以在造影的过程中由成像系统记录获得。根据前三组参数可以由式(2-22)、(2-23)、(2-24)计算几何变换矩阵;根据像素间距可以将图像平面坐标系的坐标转换到投影面坐标系,参见式(2-14)。这些参数的准确程度直接影响血管三维重建的精度。
空间点三维坐标的误差如图2-54所示,由图像A的点p1和图像B的对应点p2重建得到三维点P,L1是由X射线源S1和点p1确定的投影直线,L2是由X射线源S2和点p2确定的投影直线,  垂直L1于点G,
垂直L1于点G,  垂直L2于点H,将点P分别投影到图像A和B得到新的投影点p′1和p′2。点P的三维重建误差可以通过以下两种方式进行评价:
垂直L2于点H,将点P分别投影到图像A和B得到新的投影点p′1和p′2。点P的三维重建误差可以通过以下两种方式进行评价:
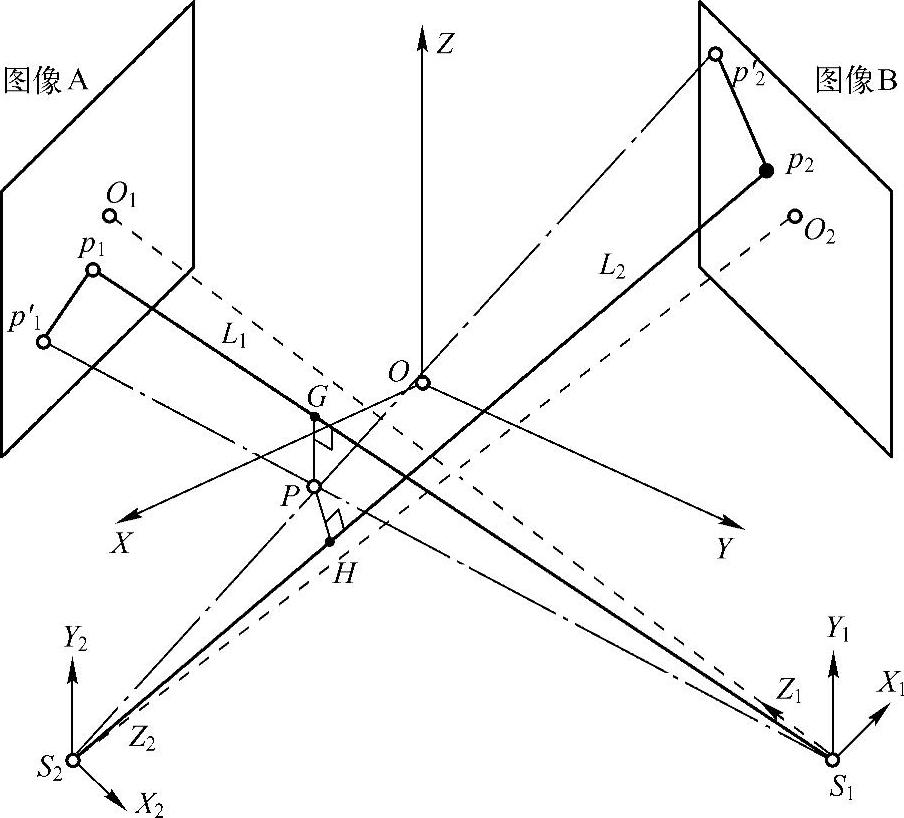
图2-54 空间点三维坐标的误差
1)三维空间重建误差。由共轭点对p1和p2重建点P的三维坐标,也就是根据两条投影直线L1和L2计算空间点P的位置,于是可以根据点P到两条投影直线的距离评价三维重建的误差,记为ε1。如图2-54所示,设点P到直线L1和L2的距离(即线段  和
和  的长度)分别为d1和d2,则ε1可以表示为 (https://www.xing528.com)
的长度)分别为d1和d2,则ε1可以表示为 (https://www.xing528.com)
ε1(p1,p2)=d1+d2 (2-52)
2)二维空间重建误差。如图2-54所示,由二维图像平面的共轭点p1和p2计算点P的三维坐标,然后将点P分别投影到图像A和B上得到投影点p′1和p′2。如果重建的精度较高,则图像A中的点p1和p′1应该比较接近,图像B中的点p2和p′2也应该比较接近。于是可以用二维图像平面上线段  和
和  的长度评价三维重建的误差,记为ε2,表示为
的长度评价三维重建的误差,记为ε2,表示为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。