



在诊断心血管狭窄时若采用人工或半人工来确定血管的内径及轮廓,不仅工作量大,耗时长,而且其结果的可重复性和精确性都较差,受人为因素影响较大。Detre[24]早在20世纪80年代中期就对肉眼识别造影图像中的心血管狭窄提出了质疑。CAG图像中有血管和背景两种成分,采用数字图像处理技术可将血管从背景中自动分割开来,提取出能够反映其空间拓扑结构的血管骨架(血管中心线、血管区域细化结果统称为骨架)。
物质对X射线的吸收满足朗伯定律公式如下。

式中,I为X射线的投射强度;I0为X射线源发出的射线强度;r为X射线通过的距离;μ为X射线的衰减系数。于是造影图像上点(u,v)的灰度值可以表示如下:

造影图像的灰度分布由三部分组成:软组织、胸骨和充满造影剂的血管,由下式表示:

式中,μt、μb和μv分别表示X射线对软组织、骨头和血管的衰减系数;lt、lb和lv分别表示对应的距离。式(2-17)可以简单地用前景和背景表示如下:
i(u,v)=b(u,v)+f(u,v)(2-18)式中,f(u,v)=μvlv(u,v)为前景;b(u,v)=μtlt(u,v)+μblb(u,v)为背景。血管提取的目的就是从f(u,v)中将i(u,v)分割出来。
早在20世纪80年代中期人们就开始了造影图像中血管提取的研究,但直到1990年以后才得到广泛关注。至今已经提出了许多方法,比较典型的有:采用模式识别法来判断血管狭窄[25];采用形态学法,利用八个分别代表不同方向血管区域的形态学算子进行血管分割[26];自适应跟踪算法[27,28];根据血管中心线垂线上的灰度呈高斯分布的特点,把中心线可以看做一个“灰度脊线”,采用八个分别代表不同方向的模板跟踪脊线[29];Snake模型方法[30-32]等。
现有的方法可以归纳成以下七类:
1)阈值运算法:主要包括固定阈值和选择性阈值(也称自动阈值),前者方法简单,但效果较差;后者略有改进,但容易引入伪边缘。
2)基于导数的方法:主要包括一阶导数法和二阶导数法,一般需要首先进行平滑处理。此类方法可以通过加权取平均值,得到较好的效果,但需要依靠一定的经验选择权值,而且提取的血管边缘往往不连续。
3)全自动提取方法:假设血管横截面为椭圆,截面灰度呈高斯分布,中心线可以看做脊线。对造影图像作傅里叶变换,计算“第一零交叉”。此类方法大都没有考虑背景模式,因此对结构噪声比较敏感。(https://www.xing528.com)
4)参数模型方法:考虑了背景结构和成像系统的影响,用多项式表示组织或胸骨的投影背景,所以比基于导数的提取方法有所改进。
5)形态学和动态规划:利用代表不同方向血管的形态学算子进行血管分割。该方法提取血管交叉点的效果不好,可提取的血管直径范围有限。
6)滤波器方法:主要包括自适应滤波器的跟踪算法和可变形模型法等。
7)基于表面的提取方法:利用由相邻的一维剖面数据计算得到的二维剖面提取血管边缘,弥补了传统方法数据点不足的缺点,可以从质量较差的造影图像中准确提取血管。
实际应用过程中,应根据造影图像中血管与背景的对比度、血管树的复杂程度以及噪声大小等选择合理的血管提取方法。对左冠和右冠造影图像的血管区域分割结果分别如图2-13~图2-16所示。
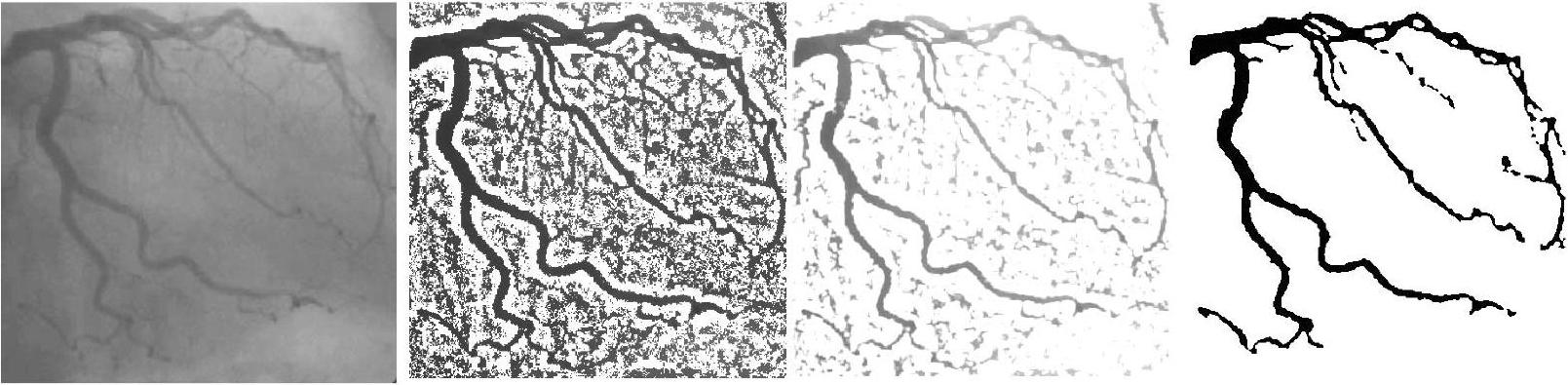
图2-13 一帧左冠CAG图像的血管区域提取结果

图2-14 两帧右冠CAG图像的血管区域提取结果
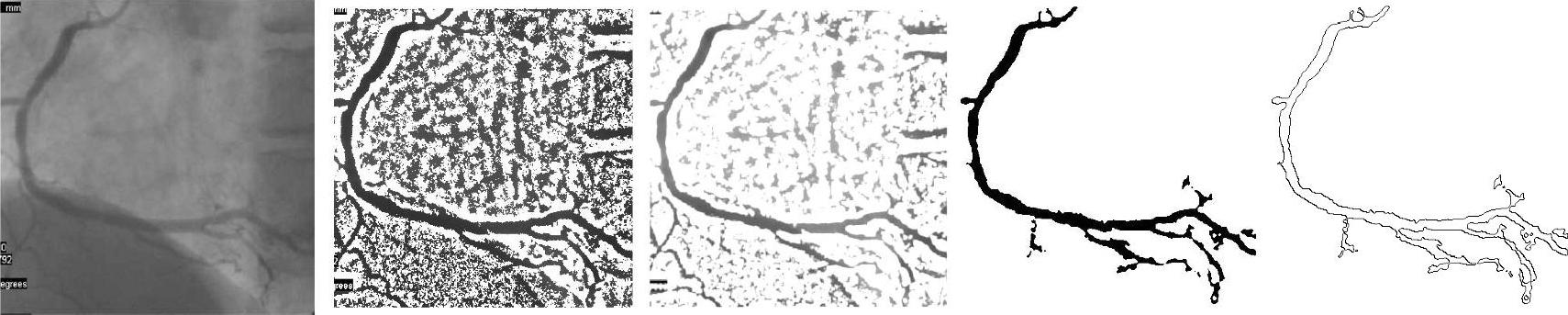
图2-15 一帧右冠CAG图像的血管区域分割和边缘提取结果

图2-16 一帧左冠CAG图像的血管区域分割和边缘提取结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。