



从上节的分析可知,虽然abc静止坐标系下的各相电流控制互相独立,然而各相电流为交流量,采用常规的PI调节器时,将在相电流的幅值和相位上存在静差。为了消除控制静差,可将各个交流量经过同步旋转坐标变换转换成直流量,由于PI调节器对直流量的控制不存在静态误差,从而改善系统的控制效果。
三相电流型PWM整流器在dq旋转坐标系下的控制原理电路如图6-22所示。将各个交流量经过同步旋转坐标变换,转换成直流量,同步旋转的角度ωt由电源电压锁相得到。为实现直流电流的恒定控制,将直流电流环的输出作为d轴电流环路的给定;为实现单位功率因数,将q轴的指令电流 设置为0。电流控制器可以按照一定的控制策略进行设计,所得到的输出经过SVM控制后转换成整流器的开关信号。
设置为0。电流控制器可以按照一定的控制策略进行设计,所得到的输出经过SVM控制后转换成整流器的开关信号。

图6-22 dq旋转坐标系下的三相电流型PWM整流器的直接电流控制原理电路
由式(6-31),可写出整流器电源侧交流电流的拉普拉斯方程为

由式(6-32),可写出电容电压的拉普拉斯方程为

在忽略输入电阻和变流器损耗的情况下,由功率平衡可得

对上式做小信号扰动,得到从 到
到 的传递函数为
的传递函数为

由式(6-64)~式(6-67)和式(6-58),对应于图6-4,可得到dq坐标系下的从输入到输出的电路模型等效框图,如图6-23所示。
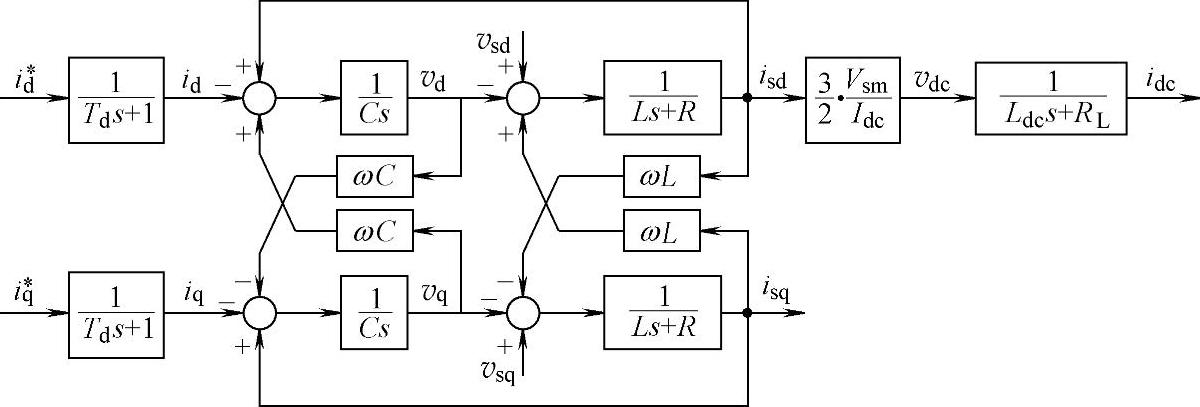
图6-23 dq坐标系下的电路模型等效框图
从图6-23的模型框图可知,这是一个多输入多输出系统。系统的交流电流、电压的d、q分量之间存在耦合,这种耦合会影响系统的动态性能,但是由于耦合系数是常量,可以通过合理的控制设计来抵消耦合量的影响。下面以d轴电容电压的控制为例来说明解耦控制的原理。
假定电容电压d轴控制环路的输出指令 为
为

式中,Gv(s)代表电容电压环路控制器。将式(6-68)代入式(6-65),在忽略控制延时的情况下,整理得到
 (https://www.xing528.com)
(https://www.xing528.com)
根据关系式(6-69),可得到电容电压d轴环路控制环路框图,如图6-24所示。
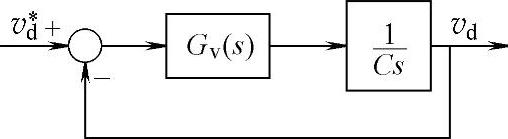
图6-24 电容电压d轴环路控制环路框图
可见,电容电压d轴控制环路在该输出指令的作用下,抵消了来自q轴分量的影响,同时也消除了电感电流d轴分量对它的影响。
类似地,设定电容电压q轴控制环路的输出指令 为
为

电容电压的q轴控制环路函数关系如下:

同样,整流器电源侧交流电流的d、q轴控制环路的输出指令 、
、 为
为

式中,Gi(s)代表交流滤波电感的电流环路控制器。在该指令控制作用下,可得到简化后的电源侧交流电流的d、q轴控制环路函数关系为

式中,Gcv(s)为电容电压环路的闭环传递函数。根据关系式(6-73),可画出电源侧交流电流d轴环路控制框图,如图6-25所示。

图6-25 电源侧交流电流的d轴环路控制框图
d轴和q轴控制指令经过上述设计后,实现了d轴和q轴环路之间的解耦控制,完整的d、q解耦控制系统如图6-26所示。
图6-26中,Gdc(s)代表直流电流环路控制器。基于上述设计,可画出直流电流环路的控制框图如图6-27所示。
图6-27中,Gci(s)为电源侧交流电流环路的闭环传递函数。
从图6-24、图6-25和图6-27可以看出,经过解耦后的控制环路可以按单输入、单输出系统进行设计,各个控制器的设计更加方便。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。