



三相三线PWM整流器在dq同步旋转坐标系下的平均状态空间模型为
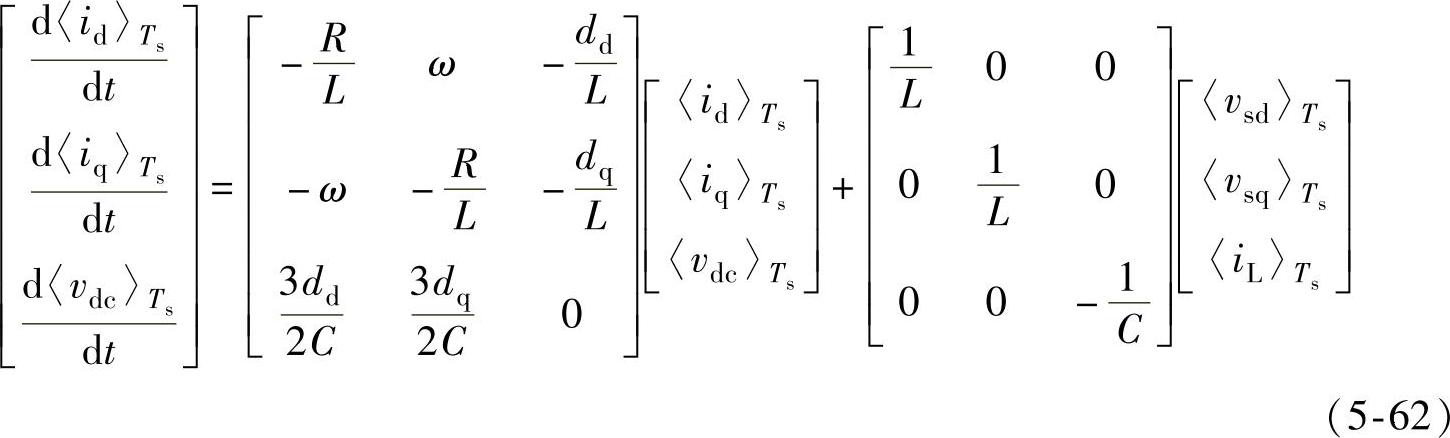
根据式(5-62),可以得到三相三线PWM整流器在同步旋转坐标系下开关周期平均模型等效电路,如图5-27所示。为了构建整流器控制环路,并合理设计整流器补偿网络,需要分析整流器动态小信号模型。推导小信号模型,首先要确定直流工作点。设定变换器在直流工作点的输入输出电压、电流和占空比分别为Vsd、Vsq、Id、Iq、Vdc、Dd、Dq,根据式(5-62)可以得到直流工作点模型如下式所示:
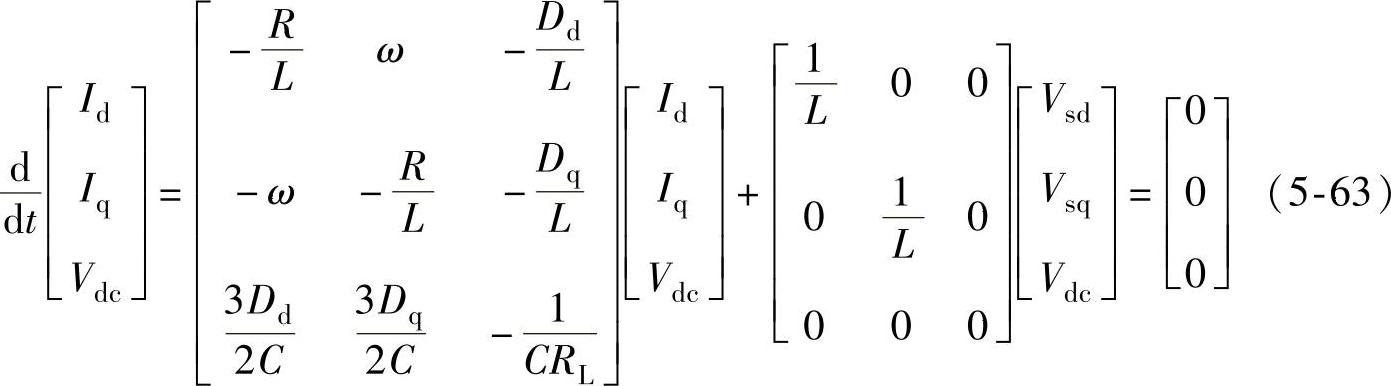

图5-27 三相三线PWM整流器在同步旋转坐标系下开关周期平均模型等效电路
化简式(5-63),得到
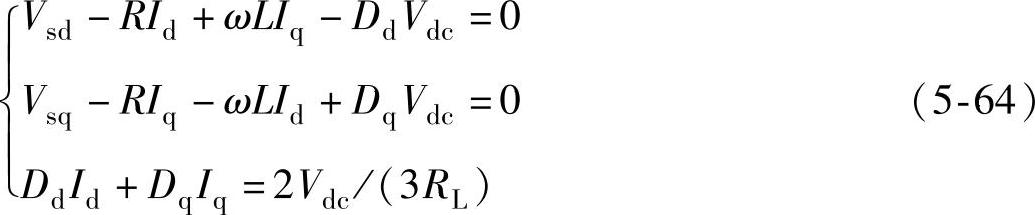
需要指出的是,式(5-64)的直流工作点方程仅在三相输入电网电压对称平衡的条件下成立,在电网电压不对称时,由于三相电压同时存在正序分量和负序分量,在按照正序确立的同步旋转坐标系下,其表现出来的直流工作点Vsd、Vsq、Id、Iq上存在低频波动,导数不等于零。按照小信号模型的定义,设非线性微分方程:dx/dt=f(x,u),设(x,u)在工作点(X,U)附近做小信号扰动( ,
, ),即
),即 ,
, ,得到
,得到

应用泰勒级数展开,并忽略二阶小项,得到

当三相输入电压对称平衡时,在直流工作点(X,U)存在方程f(X,U)=0,且dX/dt=0,于是小信号交流模型可以表示为

根据式(5-62)和式(5-67),可以得到三相三线整流器在DQ旋转坐标系下的小信号扰动模型,如下式所示:
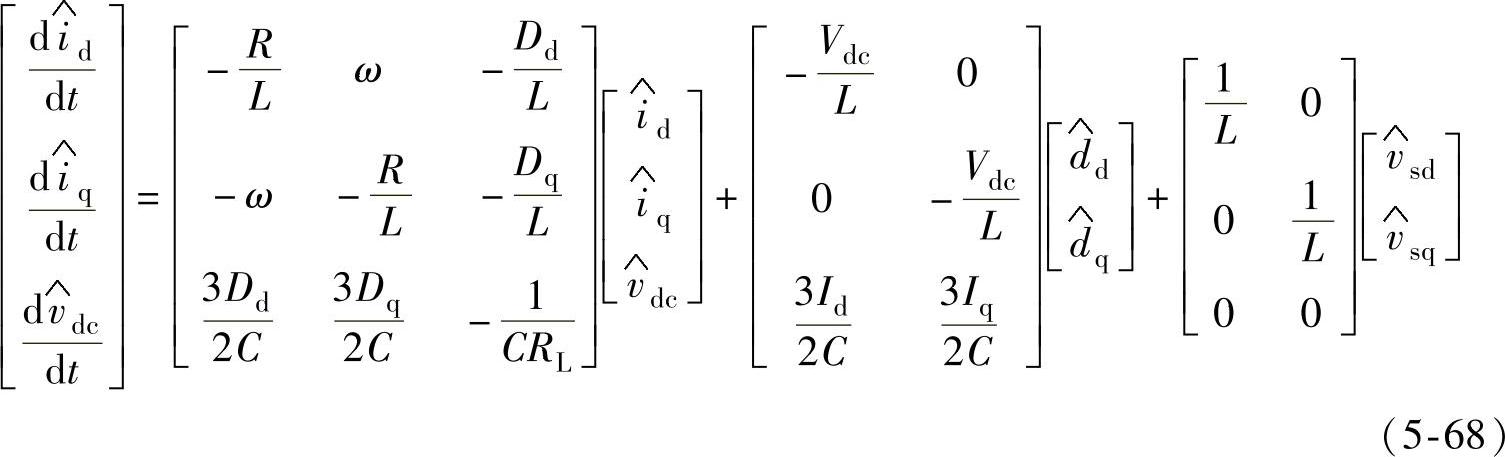
小信号模型等效电路如图5-28所示。
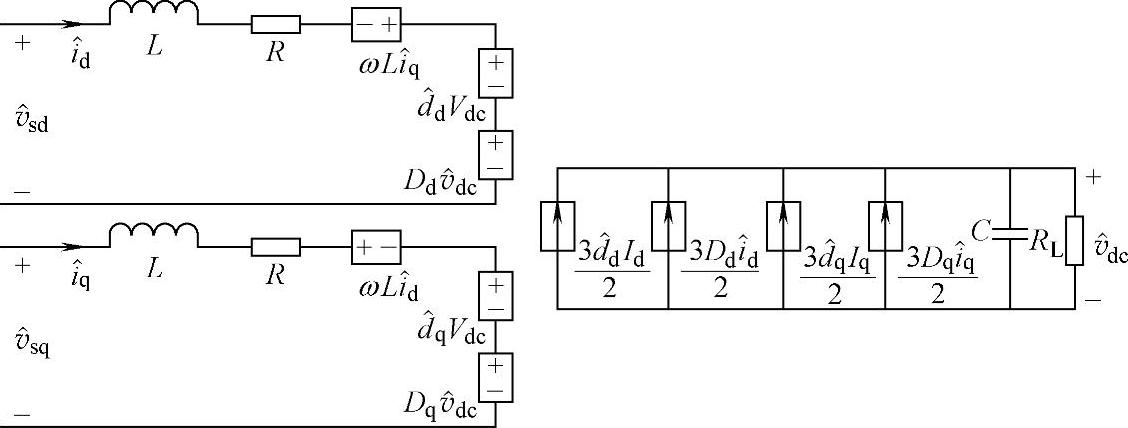
图5-28 三相三线PWM整流器在同步旋转坐标系下的小信号模型等效电路
基于前面的分析,在同步旋转坐标系下的整流器模型中,电流环存在耦合关系,因此在控制环路中有必要增加电流环解耦控制,同时为了提高整流器对于电网扰动的响应速度,引入电网电压前馈调节。三相三线PWM整流器在同步旋转坐标系下开关周期平均模型控制框图如图5-29所示,采用电压、电流双闭环控制。内环是电流环,采用PI调节器ACR,带宽较宽,目的是控制电流功率因数为1,如果整流器前端未接EMI滤波器,q轴电流基准为0;外环是电压环,采用PI调节器AVR,目的是调节直流母线电压。经过解耦之后,整流器的占空比为

 (https://www.xing528.com)
(https://www.xing528.com)

图5-29 三相三线PWM整流器在同步旋转坐标系下开关周期平均模型控制框图
根据式(5-69)和式(5-70),式(5-62)可以改写为
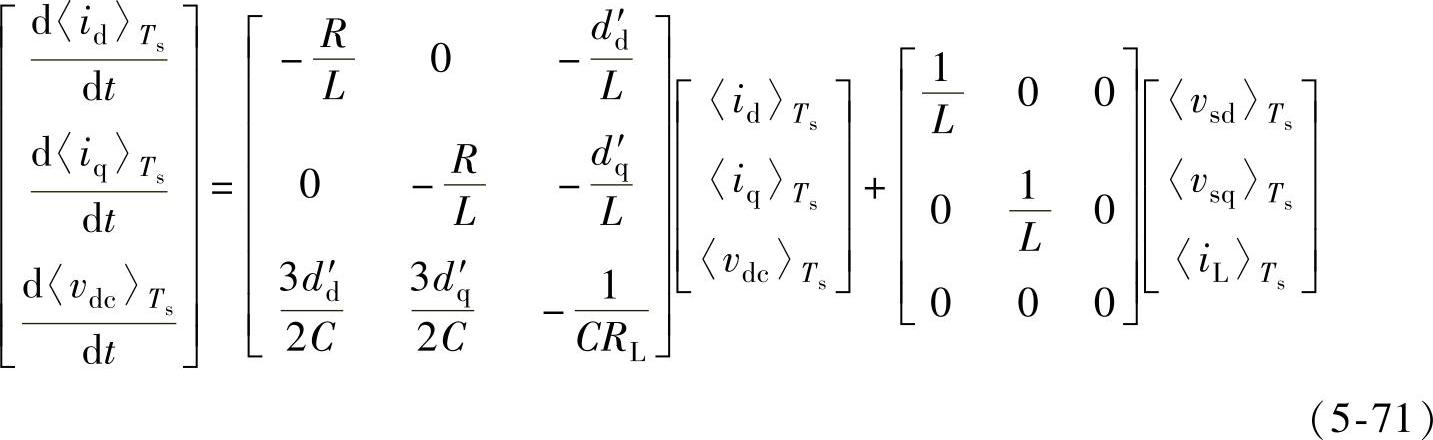
根据式(5-71),解耦之后的整流器模型如图5-30所示。
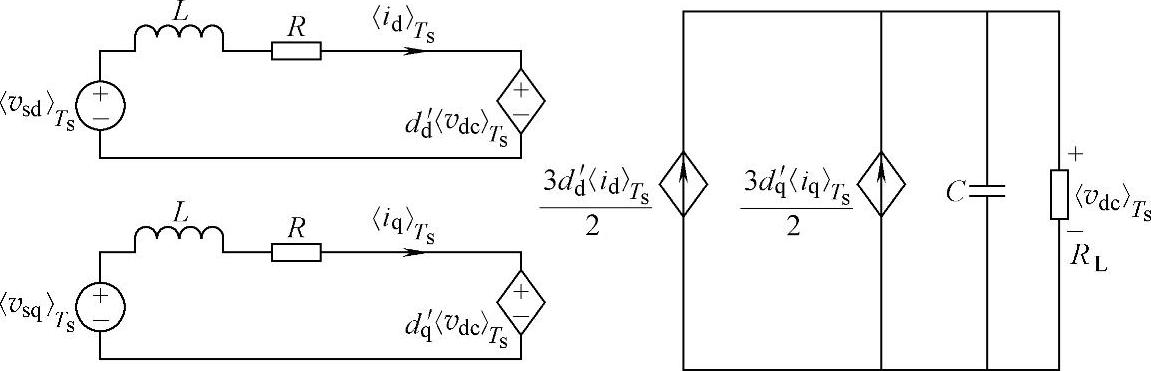
图5-30 三相三线PWM整流器解耦之后在同步旋转坐标系下开关周期平均模型等效电路
为了推导解耦之后的电路小信号模型,首先要确定直流工作点。忽略电感寄生电阻,设定解耦之后变换器在直流工作点的输入输出电压、电流和占空比分别为Vsd、Vsq、Id、Iq、Vdc、D′d、D′q,根据式(5-71)可以得到直流工作点模型如下式所示:
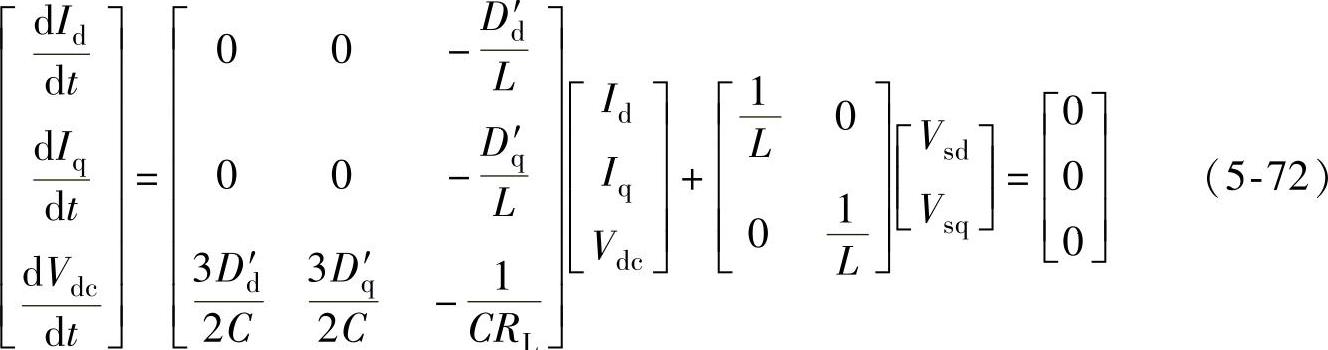
化简式(5-72),得到

需要指出的是,式(5-73)的直流工作点方程仅在三相输入电网电压对称平衡的条件下成立,在电网电压不对称时,由于三相电压同时存在正序分量和零序分量,在按照正序确立的同步旋转坐标系下,其表现出来的Vsd、Vsq、Id、Iq上存在低频波动,导数不等于零。按照小信号模型的定义,推导得到三相整流器解耦之后在dq旋转坐标系下的小信号扰动模型如下式(5-74)所示:
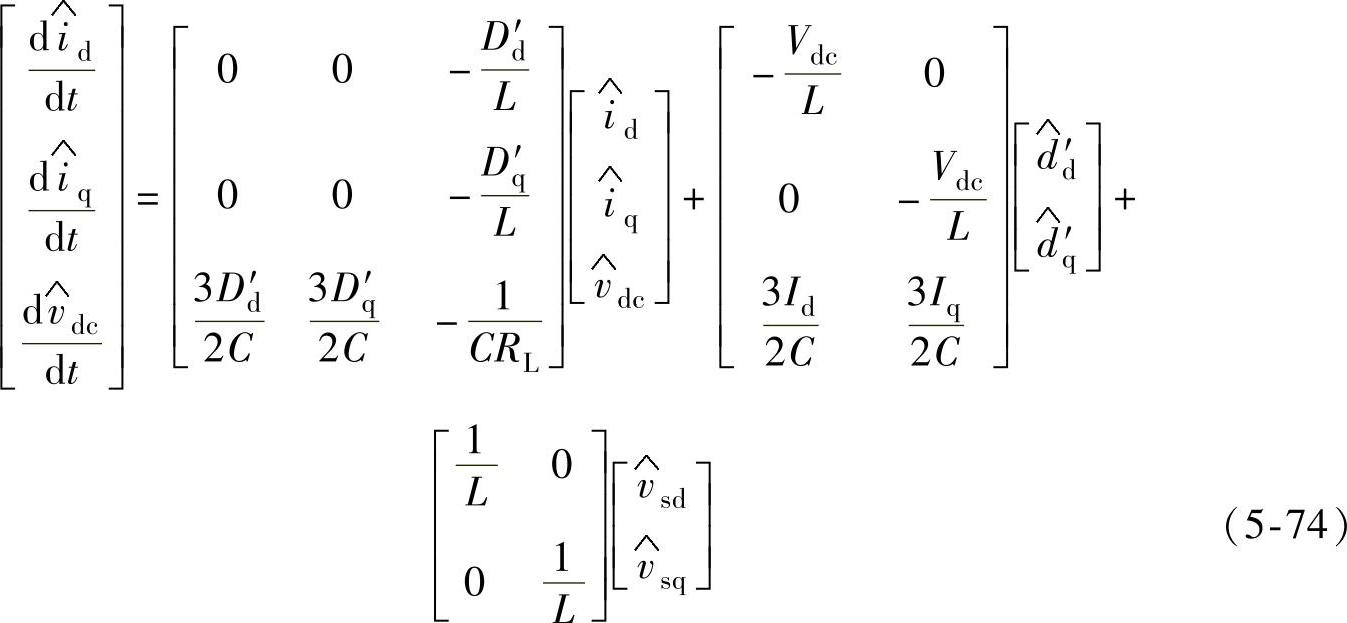
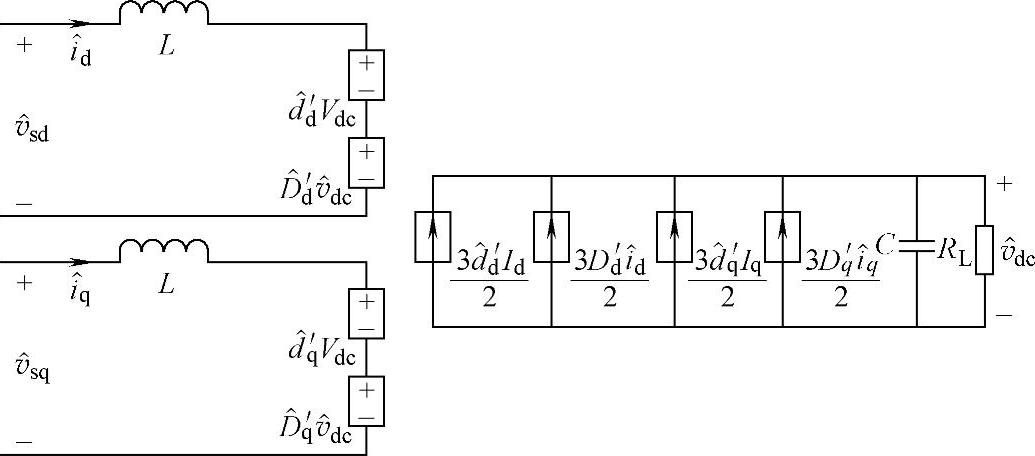
图5-31 三相三线PWM整流器解耦之后在同步旋转坐标系下的小信号模型等效电路
小信号模型等效电路如图5-32所示。根据图5-31,三相三线PWM整流器小信号模型等效为输出并联的Boost型直流变换器,设计电流环时,认为是两个互不影响的独立的电流环路,可以按照单输入单输出系统进行补偿器参数设计。
根据式(5-74),解耦之后整流器小信号模型的电压、电流环传递函数为
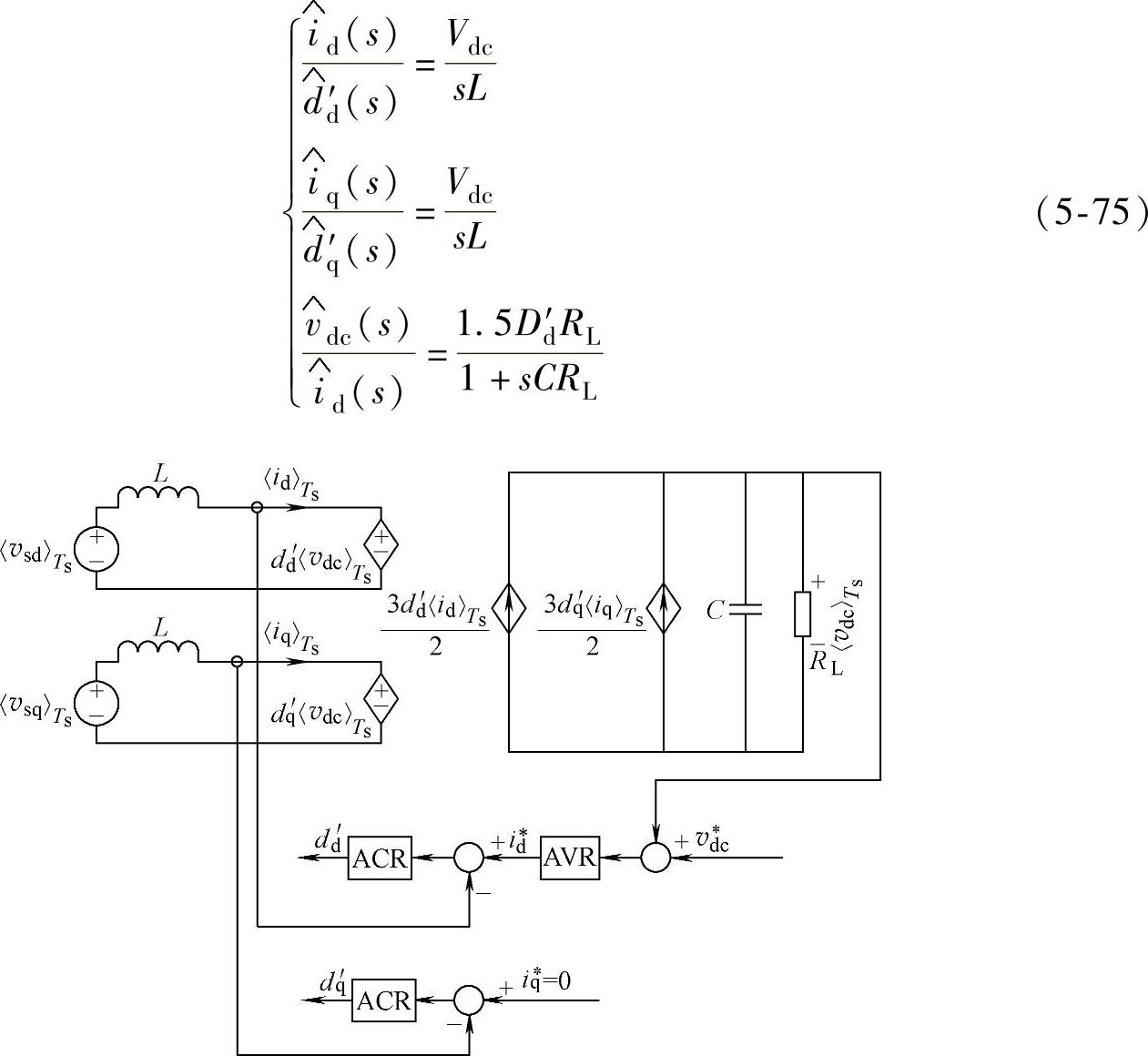
图5-32 解耦后三相三线PWM整流器等效控制框图
解耦后三相三线PWM整流器等效控制框图如图5-32所示。采用电压、电流双闭环控制,内环是电流环,采用PI调节器ACR,它的带宽较宽,目的是控制电流功率因数为1,如果整流器前端未接EMI滤波器,q轴电流基准为0;外环是电压环,采用PI调节器AVR,目的是调节直流母线电压。把电流环调节器输出的同步旋转坐标系的占空比转换为a、b、c轴上的占空比,就可以得到三相桥臂的占空比。三相三线PWM整流器整体控制框图如图5-33所示。在实际控制中,一般采用空间矢量调制,这时将电流环输出得到的占空比转换到αβ静止坐标系上的占空比即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。