



所谓系统的极点配置问题,就是给定了闭环系统的极点位置后,如何通过某种方法来达到给定的极点配置。
对一个可控系统,通过状态反馈的方法,使闭环系统的极点位于预先规定的位置上。由自动控制原理,实现闭环极点任意配置必要且充分条件是系统完全可控。
在MATLAB系统中提供的place()函数,由指定的闭环系统极点计算状态反馈增益矩阵K。函数的调用格式为
K=place(A,B,p)
其中,输入参数A为系统的状态矩阵,B为系统的输入矩阵,p为指定的闭环系统极点。返回参数K为反馈增益矩阵,即状态反馈矩阵。
函数命令place()也可计算估计系统状态的装置即观测器的增益矩阵K,使采用全反馈u=-Kx的多输入系统具有指定的闭环极点p。其调用格式为
K=place(A ,C
,C ,p)
,p)
其中,输入参数A为系统状态矩阵,A′是A的转置矩阵;C为系统观测矩阵,C′是C的转置矩阵;p为指定的闭环系统极点。返回参数K为估计系统状态观测器的增益矩阵。
为方便计算,作者编制了判别系统的可控性并设计状态反馈控制器增益矩阵K的函数stabak.m。
【例14-26】 试判别以下系统的可控性并设计状态反馈控制器。已知系统的动态方程为1)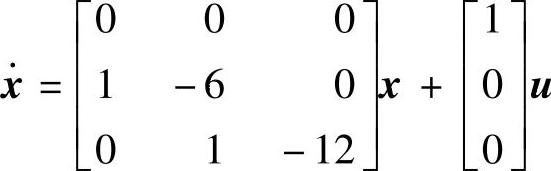 ,要求系统闭环极点为λ1=-2、λ2.3=-1±j;2)x·=
,要求系统闭环极点为λ1=-2、λ2.3=-1±j;2)x·=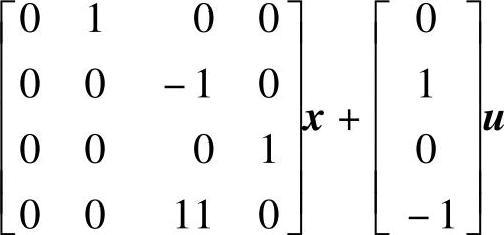 、y=[1000]x,要求闭环极点为λ1=-1、λ2=-2、λ3.4
、y=[1000]x,要求闭环极点为λ1=-1、λ2=-2、λ3.4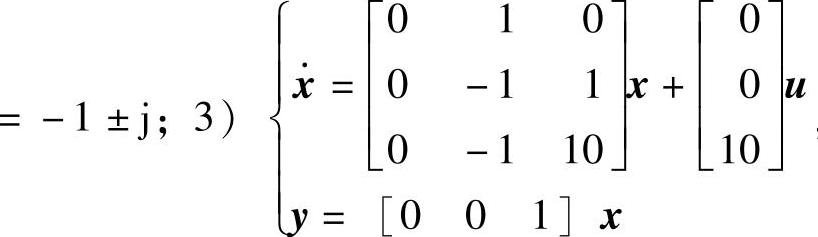 ,闭环极点为λ1=-10、λ2.3=-1±j
,闭环极点为λ1=-10、λ2.3=-1±j 。
。
解:1)给出调用自编函数stabak.m的程序求解。
clear;A=[000;1-60;01-12];B=[1;0;0];C=0;D=0;
P=[-2-1+1i-1-1i];
key=1;[K]=stabak(key,A,B,C,D,P);(https://www.xing528.com)
程序运行后表明,系统是可控的,系统可实现按题意要求的闭环极点配置;计算得的估计系统状态观测器的增益矩阵为K=[-14186-1220]。
2)也给出调用自编函数stabak.m的程序求解。
clear;A=[0100;00-10;0001;00110];
B=[0;1;0;-1];C=[1000];D=0;
p=[-1-2-1+1i-1-1i];key=1;
[K]=stabak(key,A,B,C,D,p);
程序运行后表明,系统是可控的,系统可实现按题意要求的闭环极点配置;计算得的估计系统状态观测器的增益矩阵为K=[-0.4-1-21.4-6]。
3)再给出调用自编函数stabak.m的程序求解。
clear;A=[010;0-11;0-110];
B=[0;0;10];C=[001];D=0;
P=[-10-1+sqrt(3)∗j-1-sqrt(3)∗j];
key=1;[K]=stabak(key,A,B,C,D,P);
程序运行后表明,系统是可控的,系统可实现按题意要求的闭环极点配置;计算得的估计系统状态观测器的增益矩阵为K=[41.22.1]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。