



如果矩阵An×n有相重的特征值,并且按λi所解得的独立特征向量的数目小于n,则矩阵A不能化为对角阵。但仍存在一个线性变换矩阵P,使A变换成
J=P-1AP
J叫做约当(Jordan)标准型矩阵,简称约当标准型。
在MATLAB中用函数命令jordan()求矩阵的约当标准型。函数的调用格式为
[V,J]=jordan(A)
这种格式函数的输入参数A是对象矩阵,输出参数J是矩阵A的Jordan标准型矩阵,输出参数V即是那个使约当标准型满足J=V\A·V=V-1·A·V的非奇异矩阵。
为方便计算,作者编制了利用MATLAB系统函数命令jordan.m计算约当标准型的函数jorsta.m。请看示例。
【例14-16】 已知系统状态空间表达式1) 、y=[100]x;2)
、y=[100]x;2) 、y=[110]x;3)
、y=[110]x;3)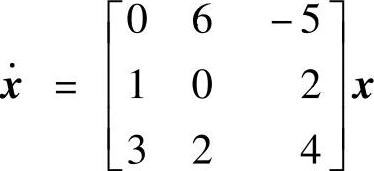 ;4)
;4) =
= ,试将动态方程式化为约当标准型。
,试将动态方程式化为约当标准型。
解:1)给出调用自编函数jorsta.m的程序求解。
clear;A=[010;001;230];B=[0;0;1];C=[100];
[V,J,A1,B1,C1]=jorsta(A,B,C);
程序运行后得到矩阵A的约当标准型 ,系统线性变换后的方程
,系统线性变换后的方程 、
、 ,并验证了系统状态矩阵特征值的不变性。
,并验证了系统状态矩阵特征值的不变性。
2)同样给出调用自编函数jorsta.m的程序求解。(https://www.xing528.com)
clear;A=[010;001;-1-3-3];B=[0;0;1];C=[110];
[V,J,A1,B1,C1]=jorsta(A,B,C);
程序运行后得到矩阵A的约当标准型 ,系统线性变换后的方程
,系统线性变换后的方程 、
、 ,并验证了系统状态矩阵特征值的不变性。
,并验证了系统状态矩阵特征值的不变性。
3)也给出调用自编函数jorsta.m的程序求解。
clear;A=[06-5;102;324];B=[0;0;0];C=[000];
[V,J,A1,B1,C1]=jorsta(A,B,C);
程序运行后得到矩阵A的约当标准型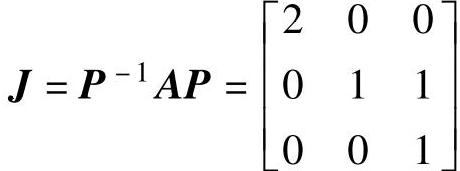 ,系统线性变换后的方程
,系统线性变换后的方程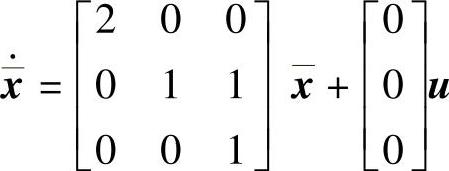 、
、 ,并验证了系统状态矩阵特征值的不变性。
,并验证了系统状态矩阵特征值的不变性。
4)还给出调用自编函数jorsta.m的程序求解。
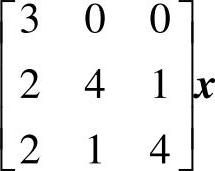
clear;A=[300;241;214];B=[0;0;0];C=[000];
[V,J,A1,B1,C1]=jorsta(A,B,C);
程序运行后得到矩阵A的约当标准型 ,系统线性变换后的方程
,系统线性变换后的方程 、
、 ,并验证了系统状态矩阵特征值的不变性。
,并验证了系统状态矩阵特征值的不变性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。