



从 坐标系逆向变回到x坐标系,所进行的变换为
坐标系逆向变回到x坐标系,所进行的变换为 ,即由(A、B、C)求(A、B、C)。根据自动控制原理,两坐标系相应矩阵之间有以下关系
,即由(A、B、C)求(A、B、C)。根据自动控制原理,两坐标系相应矩阵之间有以下关系
存在,此则称为对系统进行P-1变换。已经说明过,同一系统特征值不变。为方便计算,作者编制了对系统进行P-1变换即从 坐标系逆向变回到x坐标系的函数lintra02.m。
坐标系逆向变回到x坐标系的函数lintra02.m。
【例14-11】 对【例14-10】 坐标系里的系统进行坐标反变换(从
坐标系里的系统进行坐标反变换(从 坐标系逆向变换到x坐标系)。
坐标系逆向变换到x坐标系)。
解:给出调用自编函数lintra02.m的程序求解。
clear;A1=[-20;3-1];B1=[1.5;-0.5];C1=[33];
P1=[0.50.5;0.5-0.5];[A,B,C]=lintra02(A1,B1,C1,P1);
程序运行后得到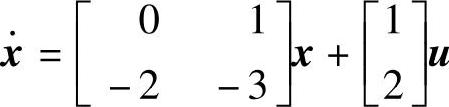 、y=[30]x,即为x坐标系里的动态方程。
、y=[30]x,即为x坐标系里的动态方程。
【例14-12】 已知控制系统 ,1)欲对系统进行坐标变换,其变换关系为
,1)欲对系统进行坐标变换,其变换关系为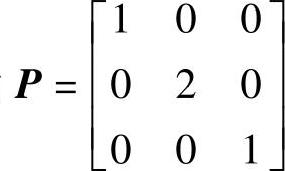 ,试求系统线性变换后的系统动态方程,并验证系统状态矩阵特征值的不变性;2)对
,试求系统线性变换后的系统动态方程,并验证系统状态矩阵特征值的不变性;2)对 坐标系里的系统进行坐标反变换。
坐标系里的系统进行坐标反变换。
解:1)给出调用自编函数lintra01.m的程序求解。(https://www.xing528.com)
clear;syms s t;A=[-210;0-30;01-4];B=[-1-1;14;2-3];
C=[000];P=[100;020;001];[A1,B1,C1]=lintra01(A,B,C,P);
程序运行后得 坐标系的系统动态方程
坐标系的系统动态方程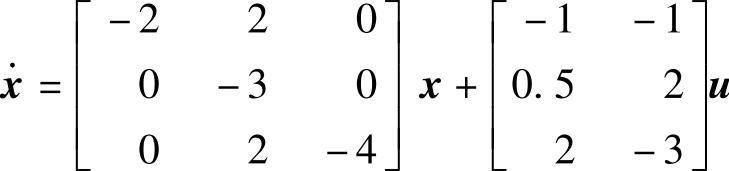 ,还有变换关系式
,还有变换关系式 。
。
2)给出调用自编函数lintra02.m的程序对x坐标系里的系统进行坐标反变换
clear;A1=[-220;0-30;02-4];B1=[-1-1;0.52;2-3];C1=[000];
P1=[100;00.50;001];
[A,B,C]=lintra02(A1,B1,C1,P1);
程序运行后得到x坐标系里的动态方程,还有变换关系式P。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。