



控制系统Bode图滞后校正也是校正设计最基本的设计方法,作者也为此开发了自编函数lagc.m,请看示例。
【例12-4】 已知单位负反馈系统的开环传递函数为 ,式中K0=2rad/s。系统额定转速为35r/min,输出角度误差ess(∞)=3°。1)试用Bode图设计方法对系统进行串联滞后校正设计,使之满足校正后的相角裕度γ≥45°;2)对校正补偿器进行有源网络实现的参数计算。
,式中K0=2rad/s。系统额定转速为35r/min,输出角度误差ess(∞)=3°。1)试用Bode图设计方法对系统进行串联滞后校正设计,使之满足校正后的相角裕度γ≥45°;2)对校正补偿器进行有源网络实现的参数计算。
解:1)系统稳态性能指标计算。
本题给定系统为Ⅰ型,系统在匀速信号作用下稳态误差为常值,那么,满足系统稳态性能指标要求的系统开环放大系数为

根据自动控制理论与题意,则校正环节要求的放大系数为 ,则满足稳态性能指标要求的系统开环传递函数为
,则满足稳态性能指标要求的系统开环传递函数为 。
。
2)作原系统的Bode图与阶跃响应曲线,检查是否满足要求。
clear;K=70;n1=1;d1=conv(conv([10],[0.51]),[0.1661]);
s1=tf(K∗n1,d1);s2=[];key=1;chec(key,s1,s2);
程序运行后得到未校正系统Bode图如图12-5所示,还有如图12-6所示的未校正系统阶跃响应曲线。由图12-5可知未校正系统的频域性能指标:
幅值稳定裕度:Lh=-18.8dB -π穿越频率:ωg=3.47rad/s
相角稳定裕度:γ=-42.7° 剪切频率:ωc=8.78rad/s
由计算的相角稳定裕量与模稳定裕量均为负值可知,这样的系统根本不能工作。这也可从图12-6看到阶跃响应曲线为发散的振荡,故系统必须校正。

图12-5 未校正系统Bode图与频域性能
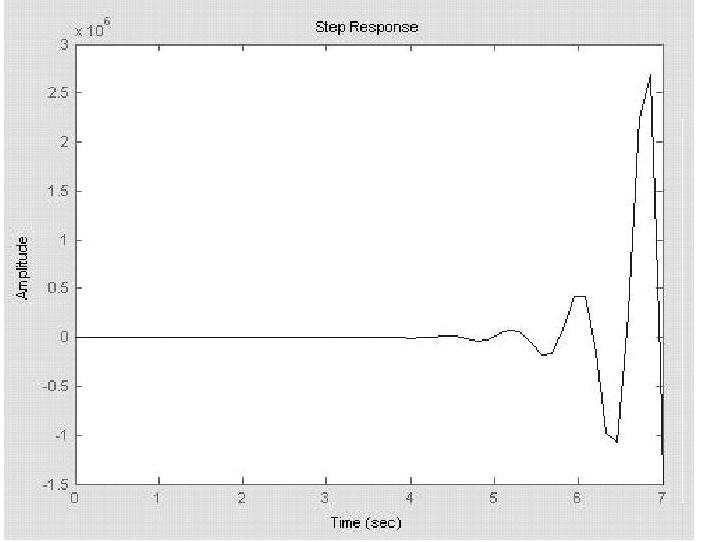
图12-6 未校正系统的单位阶跃响应曲线
3)计算校正后系统剪切频率的上限。根据题意,校正后系统相角裕度γ≥45°。先不考虑校正环节的相频特性,根据自动控制原理,在剪切频率处,有γ=φ(ωc)-(-180°),即
45°=180°-90°-arctan(0.5ωc)-arctan(0.166ωc)
解此三角方程,求出满足系统的相角裕度γ≥45°的剪切频率的上限:
clear;syms omegac;
[omegac]=solve( atan(0.5∗omegac)+atan(0.166∗omegac)=(45)∗pi/180
atan(0.5∗omegac)+atan(0.166∗omegac)=(45)∗pi/180 );
);
omegac=vpa(omegac,3),
程序运行后得到系统剪切频率上限ωc=1.29rad/s,必须有ωc≤1.29rad/s。取校正后系统剪切频率ωc2=1.2rad/s。
4)求滞后校正器的传递函数。取校正后系统剪切频率ωc2=1.2rad/s与相角裕度γ=45°。如果已知系统校正后相角裕度与剪切频率,可以调用以下函数lagc()的程序求滞后校正补偿器的两个传递函数。
clear;K=70;n1=1;d1=conv(conv([10],[0.51]),[0.1661]);
sope=tf(K∗n1,d1);wc=1.2;gama=46;
[Gc]=lagc(2,sope,[wc]),[Gc]=lagc(1,sope,[gama]),
程序运行后得到按ωc2=1.2rad/s滞后校正补偿器传递函数 、按γ=45°的滞后校正补偿器传递函数
、按γ=45°的滞后校正补偿器传递函数 。程序校正后得到ωc2=1.2rad/s的Bode图和阶跃响应分别如图12-7和图12-8所示。
。程序校正后得到ωc2=1.2rad/s的Bode图和阶跃响应分别如图12-7和图12-8所示。

图12-7 校正后ωc2=1.2rad/s的Bode图

图12-8 ωc2=1.2rad/s的阶跃响应
5)校验系统校正后频域性能是否满足题目要求。
①当剪切频率ωc2=1.2rad/s时有校正器的系统传递函数为

clear;K=70;n1=1;d1=conv(conv([10],[0.51]),[0.1661]);s1=tf(K∗n1,d1);
n2=[8.3331];d2=[408.81];s2=tf(n2,d2);key=2;chec(key,s1,s2);
程序运行后得到
幅值稳定裕度:Lh=14.3dB -π穿越频率:ωg=3.33rad/s
相角稳定裕度:γ=42.1° 剪切频率:ωc=1.2rad/s
由数据可以看出,系统校正后相角稳定裕度γ=42.1°<45°,没满足题目要求。再按相角裕度γ=45°的校正器进行校核。
②当相角裕度γ=45°时有校正器的系统传递函数为

clear;K=70;n1=1;d1=conv(conv([10],[0.51]),[0.1661]);
s1=tf(K∗n1,d1);n2=[9.1331];d2=[503.91];s2=tf(n2,d2);
key=2;chec(key,s1,s2);
程序运行后得到校正后系统Bode图如图12-9所示。由图可知系统的:
幅值稳定裕度:Lh=15.4dB -π穿越频率:ωg=3.34rad/s
相角稳定裕度:γ=45.3° 剪切频率:ωc=1.1rad/s
数据显示,校正后系统相角稳定裕度γ=45.3°>45°,剪切频率ωc=1.1rad/s<1.29rad/s。本来滞后校正就是以牺牲系统快速性来换取稳定裕度的,所以指标完全满足题目要求。
③程序还绘制出校正后阶跃响应曲线如图12-10所示,并计算了系统性能指标:超调量σ%=27.1863%;峰值时间tp=2.5956s;调节时间(5%)ts=4.2179s。
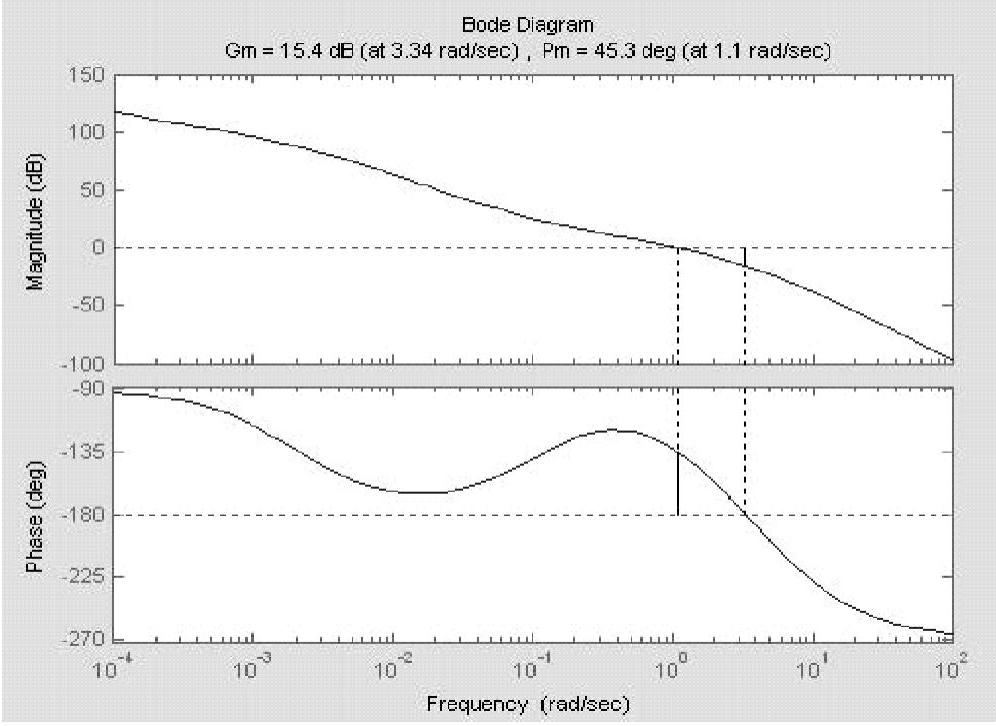
图12-9 按γ=45°校正后系统Bode图

图12-10 校正后的单位阶跃响应曲线
由以上数据看到,校正后系统剪切频率从ωc=8.78rad/s减少到1.1rad/s,稳定裕度从γ=-42.7°提高到45.3°,系统从不稳定到稳定,这正是滞后校正的功能所在。
6)对校正补偿器进行有源网络实现的参数计算。根据校正环节Kc=35,Gc(s)=35 。选择同相输入PI有源校正网络如图12-11所示。对图12-11所示的传递函数
。选择同相输入PI有源校正网络如图12-11所示。对图12-11所示的传递函数 推导如下。(https://www.xing528.com)
推导如下。(https://www.xing528.com)
根据模拟电子技术理论:①为保持两个输入端对地电阻相等,有R0=R1//R2;②反相输入端Σ与同相输入端Σ′是虚短路,即Ui=UΣ=UΣ′;③有分压表达式:

即 
式中,

图12-11 近似PI有源校正网络
请注意, ,
, ,T=R2C1这三个方程,实际上只有两个是独立的,即三个参数R1,R2,C只有两个是独立的,第3个必须根据工程实际进行选取。
,T=R2C1这三个方程,实际上只有两个是独立的,即三个参数R1,R2,C只有两个是独立的,第3个必须根据工程实际进行选取。
为实现 ,需确定参数。按以上公式带入数据:
,需确定参数。按以上公式带入数据: ,
, ,T=R2C1=503.9。选C1=10×10-6F
,T=R2C1=503.9。选C1=10×10-6F
clear;syms R0 R1 R2 C1;
[R1,R2]=solve( 503.9=R2∗10^(-5)
503.9=R2∗10^(-5) ,
, R1∗R2/(R1+R2)∗10^(-5)=9.133
R1∗R2/(R1+R2)∗10^(-5)=9.133 );
);
R1=vpa(R1,6),R2=vpa(R2,6),
程序运行结果
R1=930159.
R2=.503900e8
还有
clear;R1=930159.;R2=.503900e8;
[R0]=solve( 1/R0=1/930159.+1/.503900e8
1/R0=1/930159.+1/.503900e8 );
);
R0=vpa(R0,6),
程序运行结果
R0=913300.
即R0=913300Ω,R1=930159Ω,R2=50390000Ω,还选有C=1×10-6F。
根据以上数据,要按元件标称值选择电阻、电容。在进行工程实践时,电阻R2与R3通常要使用电位器以便调试确定电阻值。电位器同样要按其系列标称值进行选择。
【例12-5】 已知单位负反馈系统的开环传递函数为 ,试用Bode图设计方法对系统进行串联滞后—超前校正设计,使之满足校正后的系统开环增益不变,相角裕度γ≥60°,超调量σ%<10%;调节时间(5%误差带)ts<0.5s。
,试用Bode图设计方法对系统进行串联滞后—超前校正设计,使之满足校正后的系统开环增益不变,相角裕度γ≥60°,超调量σ%<10%;调节时间(5%误差带)ts<0.5s。
解:1)作原系统的Bode图与阶跃响应曲线检查是否满足题目要求。
clear;K=40;n1=1;d1=conv(conv([10],[0.21]),[0.06251]);
s1=tf(K∗n1,d1);s2=[];key=1;chec(key,s1,s2);
程序运行后,可得未校正系统的Bode图与频域性能如图12-12所示,还有如图12-13所示的未校正系统阶跃响应曲线。由图12-13可知未校正系统的频域性能指标:
幅值稳定裕度:Lh=-5.6dB -π穿越频率:ωg=8.94rad/s
相角稳定裕度:γ=-14.8° 剪切频率:ωc=12.1rad/s
计算数据表明,相角稳定裕量与模稳定裕量均为负值,这样的系统是根本不能工作的。这也可从发散振荡的阶跃响应曲线(见图12-13)看到,系统必须校正。

图12-12 未校正系统的Bode图

图12-13 未校正系统的阶跃响应曲线
2)用试探法选γ=40°先求滞后校正器的传递函数。
clear;K=40;n1=1;d1=conv(conv([10],[0.21]),[0.06251]);
sope=tf(K∗n1,d1);gama=40;[Gc]=lagc(1,sope,[gama]),
程序运行得到滞后校正器 。
。
3)将Gc1(s)与原对象合并作新对象再用试探法选γ=40°求超前校正器。
clear;K=40;n1=1;d1=conv(conv([10],[0.21]),[0.06251]);
s1=tf(K∗n1,d1);n2=[3.0371];d2=[30.171];s2=tf(n2,d2);
sope=s1∗s2;gama=40;[Gc]=leadc(1,sope,[gama]);
程序运行后得到超前校正器 。
。
4)对滞后—超前校正器校验系统校正后系统性能是否满足题目要求。
clear;K=40;n1=1;d1=conv(conv([10],[0.21]),[0.06251]);
s1=tf(K∗n1,d1);n21=[3.0371];d21=[30.171];s21=tf(n21,d21);
n22=[0.4091];d22=[0.070171];s22=tf(n22,d22);
s2=s21∗s22;key=2;chec(key,s1,s2);
程序运行后得到校正后系统Bode图如图12-14所示。由图可知系统的:
幅值稳定裕度:Lh=13.8dB -π穿越频率:ωg=17.1rad/s
相角稳定裕度:γ=62.1° 剪切频率:ωc=5.9rad/s
由数据看出,系统校正后相角稳定裕度γ=62.1°>60°。程序还绘制出校正后阶跃响应曲线如图12-15所示,其超调量σ%=5.639%<10%,调节时间(5%误差带)ts=0.449s<0.5s。所以指标完全满足题目要求。
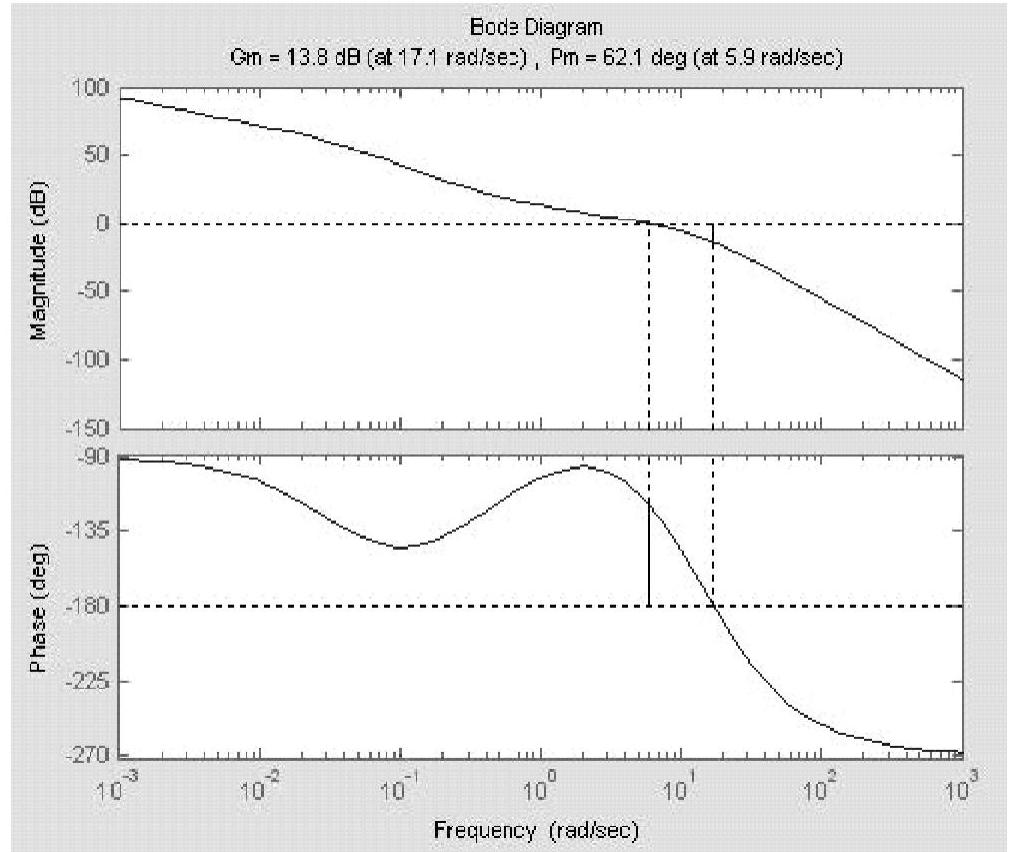
图12-14 校正后系统Bode图

图12-15 校正后阶跃响应曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。