



频率特性G(jω)是ω的复变函数,在G(jω)复平面上对于某一ω可以用一矢量或其端点(坐标)来表示。当ω从0→∞时,G(jω)端点的极坐标轨迹即是频率特性的极坐标图,叫做幅相特性曲线或Nyquist曲线(图)。
在介绍用Nyquist曲线法判断系统稳定性时,已经介绍了nyquist()函数的调用格式,并已说明函数命令执行后绘制的Nyquist曲线默认角频率ω范围为(-∞,+∞)。系统在-∞≤ω≤+∞时的完整开环频率响应G(jω)H(jω),其中,范围-∞≤ω≤0的G(-jω)H(-jω)曲线部分与范围0≤ω≤+∞的曲线部分G(jω)H(jω)对称于G(s)H(s)平面的实轴。在自动控制原理的各种教科书中,一般只绘制0≤ω≤+∞时的幅相特性曲线,这仅是MATLAB中的函数命令nyquist()执行后,绘制的对于横轴对称的幅相特性曲线的关于0≤ω≤+∞范围的部分。在此提醒读者看Nyquist曲线时注意。
【例9-8】 已知单位负反馈系统开环传递函数 ,1)用频率特性法判别闭环系统稳定性;2)用Nyquist曲线法再判别闭环稳定性;3)再用阶跃响应验证上述判断。
,1)用频率特性法判别闭环系统稳定性;2)用Nyquist曲线法再判别闭环稳定性;3)再用阶跃响应验证上述判断。
解:1)绘制Bode图判别闭环系统稳定性。
clear;n=100∗[12];d=conv([110],[120]);s=tf(n,d);margin(s),grid;
程序运行后绘制系统开环Bode图,如图9-8所示,并计算出系统性能指标如下。
幅值稳定裕度:Lh=∞dB -π穿越频率:ωg=∞rad/s
相角稳定裕度:γ=65.4° 剪切频率:ωc=5.11rad/s
以上指标说明,系统不仅稳定,而且性能非常优良。
2)复习增补开环频率响应。
根据自动控制原理[9],当系统开环传递函数含有积分环节时,即s平面原点处有开环极点,为有效应用Nyquist判据,需要对频率响应加以修正,即有所谓增补频率响应。
在绘制Nyquist曲线时,当系统开环传递函数含有ν个积分环节 时,在ω=0处给特性曲线补充一个半径为无穷大、负转
时,在ω=0处给特性曲线补充一个半径为无穷大、负转 的大圆弧,随后再随ω的增加绘制原特性曲线。这样绘制的曲线就叫做增补Nyquist曲线。
的大圆弧,随后再随ω的增加绘制原特性曲线。这样绘制的曲线就叫做增补Nyquist曲线。
3)绘制Nyquist曲线判别闭环系统稳定性。
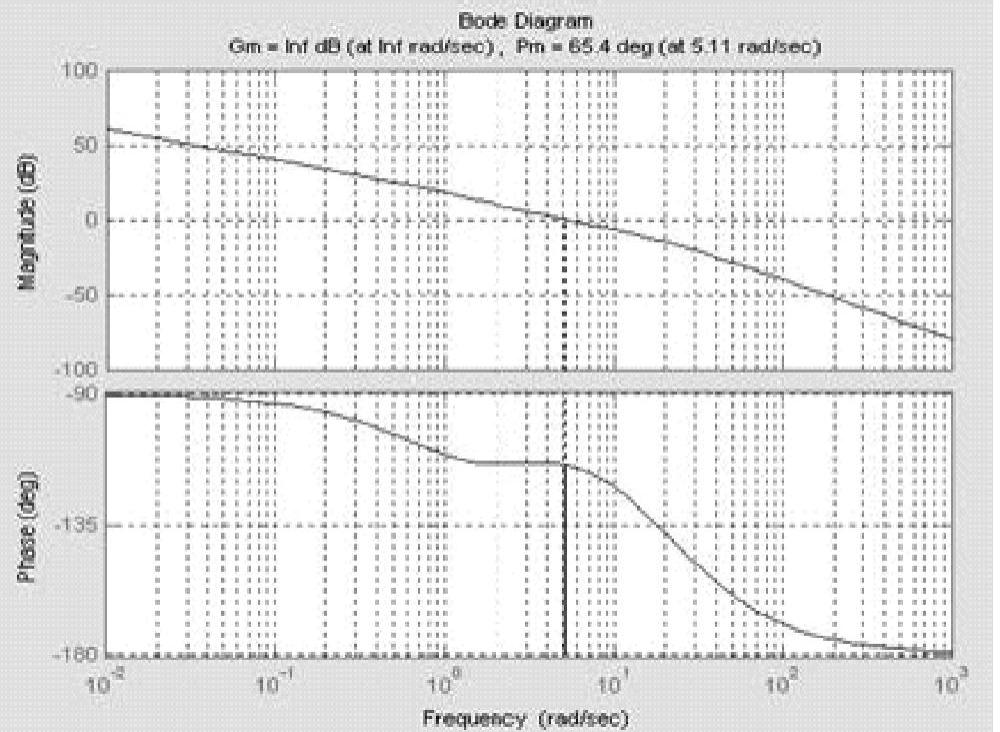
图9-8 系统开环Bode图
clear;n=100∗[12];d=conv([110],[120]);s=tf(n,d);nyquist(s),
程序运行后绘制Nyquist曲线,如图9-9所示。经增补后可知,关键点(-1、j0)在Nyquist曲线外。根据自动控制原理,系统开环特征方程零根视为稳定根,本题开环不稳定根的个数p=0,而Nyquist曲线完全不包围(-1、j0)点,或Nyquist曲线按逆时针方向包围(-1、j0)点的次数p=0,根据Nyquist稳定判据,闭环系统稳定,与Bode图法判定结果相同。
4)用阶跃响应曲线验证上述判断。
clear;n=100∗[12];d=conv([110],[120]);
s=tf(n,d);sys=feedback(s,1);step(sys),grid;
程序运行后绘制阶跃响应曲线,如图9-10所示。曲线图显示,闭环系统不仅稳定,而且时域性能非常优良,均说明上述两法判断正确。
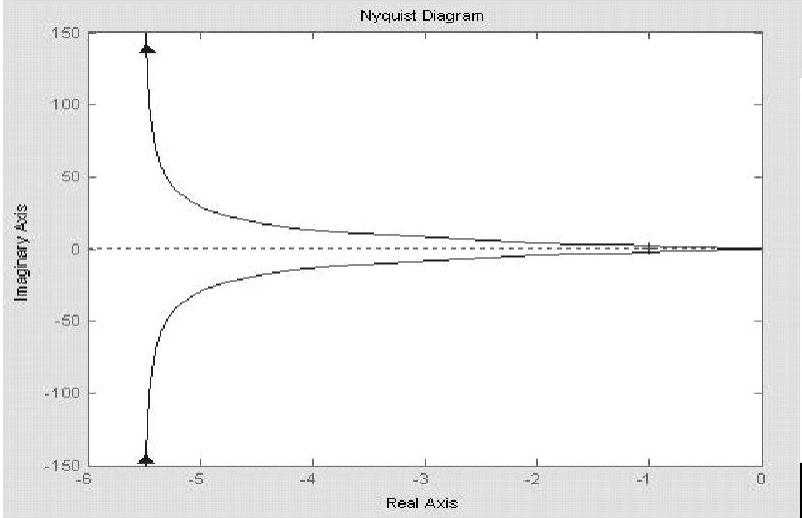
图9-9 系统Nyquist曲线
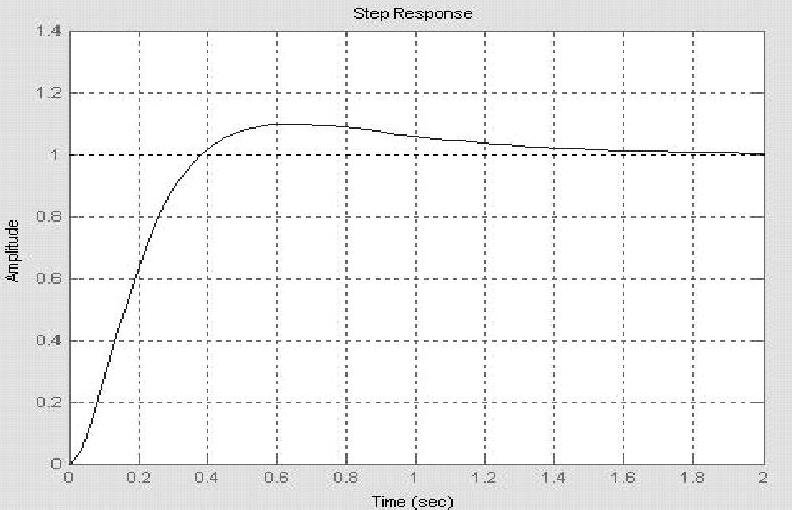
图9-10 单位阶跃响应曲线
【例9-9】 已知单位负反馈系统前向通道传递函数: 、
、 、
、 。1)试绘制G(s)的Nyquist曲线并对系统闭环判稳;2)试分别绘制系统闭环的阶跃响应曲线并验证以上判稳结论。
。1)试绘制G(s)的Nyquist曲线并对系统闭环判稳;2)试分别绘制系统闭环的阶跃响应曲线并验证以上判稳结论。
解:1)绘制三个系统G(s)的Nyquist曲线并对系统闭环判稳。
clear;n1=[81];d1=[41];G1=tf(n1,d1);nyquist(G1),grid;hold on;
n2=[81];d2=[4-1];G2=tf(n2,d2);nyquist(G2),grid;hold on;
n3=[-81];d3=[41];G3=tf(n3,d3);nyquist(G3),grid;
程序运行后绘制三个系统G(s)的Nyquist曲线,如图9-11所示。系统1的p=0,其Nyquist曲线为图中的右边小圆,远离(-1、j0)点,故系统闭环稳定。系统2的Nyquist曲线为图中的中部大圆,其Nyquist曲线虽不包围(-1、j0)点,但p=1,故系统闭环不稳定。系统3的Nyquist曲线为图中的左边大圆,其Nyquist曲线顺时针包围(-1、j0)点,但p=1,故系统闭环不稳定。(https://www.xing528.com)
2)绘制系统闭环的阶跃响应曲线并验证以上判稳结论。
①系统1。
clear;n1=[81];d1=[41];G1=tf(n1,d1);sys1=feedback(G1,1);step(sys1),grid;
程序运行后绘制系统闭环阶跃响应曲线,如图9-12所示。曲线显示系统闭环稳定,与以上判稳结论一致。
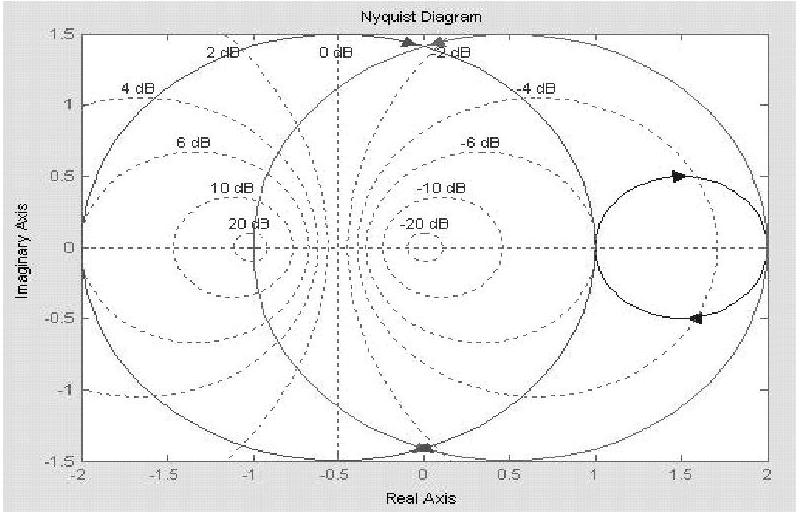
图9-11 三个系统G(s)的Nyquist曲线
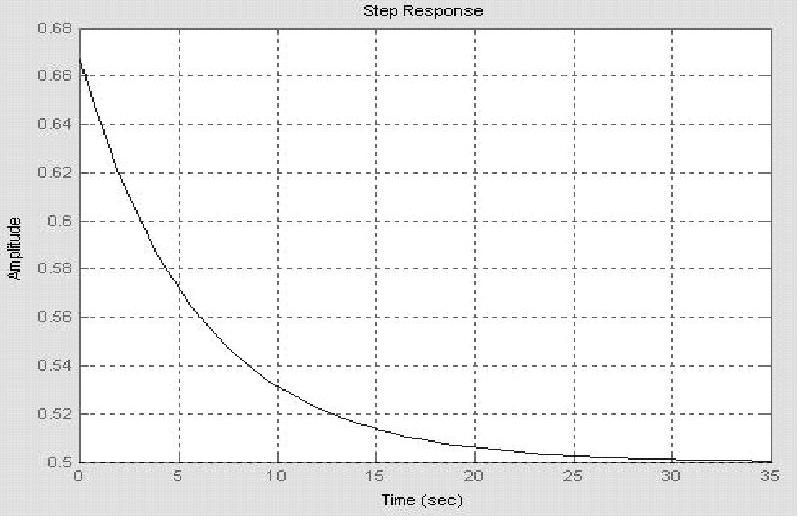
图9-12 闭环系统1阶跃响应曲线
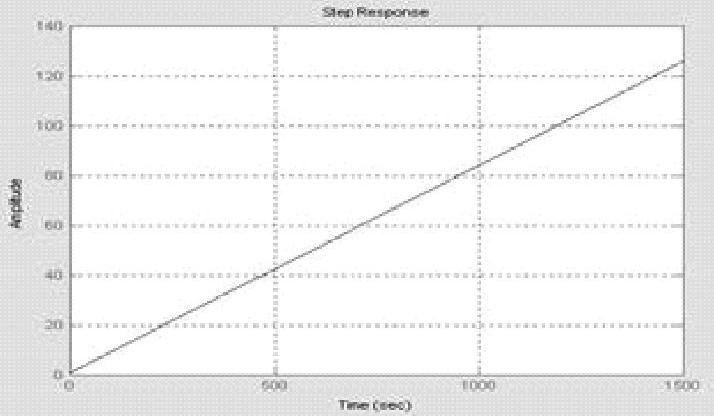
图9-13 插图闭环系统2阶跃响应曲线
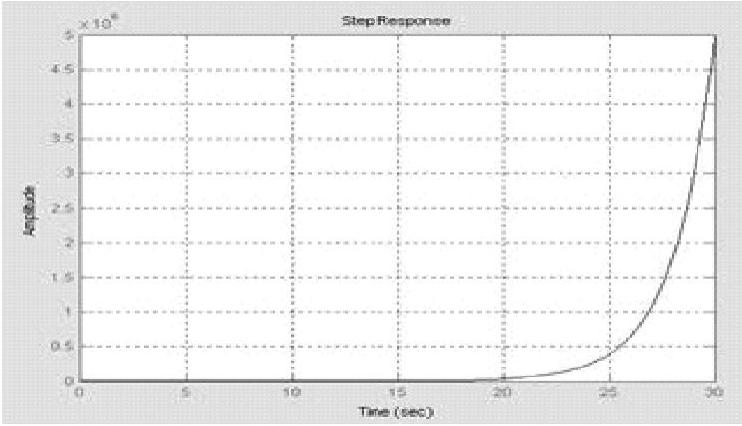
图9-14 闭环系统3阶跃响应曲线
②系统2。同系统1,绘制系统闭环阶跃响应曲线,如图9-13所示。曲线显示系统正向发散,闭环不稳定,与以上判稳结论一致。
③系统3。同系统1,绘制系统闭环阶跃响应曲线,如图9-14所示。曲线显示系统正向发散,闭环不稳定,与以上判稳结论一致。
【例9-10】 某具有延迟环节的非最小相位系统的开环传递函数为 。1)试绘制系统Nyquist曲线并判别系统稳定性。2)绘制系统阶跃响应曲线验证以上判别。
。1)试绘制系统Nyquist曲线并判别系统稳定性。2)绘制系统阶跃响应曲线验证以上判别。
解:1)复习最小相位与非最小相位环节(或系统)。
传递函数中有右极点、右零点的环节(或系统)叫做非最小相位环节(或系统);而传递函数中没有右极点、右零点的环节(或系统)叫做最小相位环节(或系统)。例如, 即惯性环节是最小相位环节、一阶不稳定环节
即惯性环节是最小相位环节、一阶不稳定环节 是非最小相位环节等。
是非最小相位环节等。
2)绘制系统Nyquist曲线。
clear;n1=[1];d1=[21];G1=tf(n1,d1);tau=0.8;
[np,dp]=pade(tau,2);Gp=tf(np,dp);G=G1∗Gp;nyquist(G),
程序运行后,绘制系统的Nyquist曲线,如图9-15所示。由于该系统的滞后相移随ω→∞而无限增大,以及幅频特性衰减到零,其Nyquist曲线在趋向坐标原点的过程中,将多次包围坐标原点。关键点(-1、j0)在Nyquist曲线外。根据自动控制原理,本题开环不稳定极点个数p=0,而Nyquist曲线完全不包围(-1、j0)点,根据Nyquist稳定判据,闭环系统稳定。
3)绘制系统闭环阶跃响应曲线。
clear;n1=[1];d1=[21];G1=tf(n1,d1);tau=0.8;[np,dp]=pade(tau,2);
Gp=tf(np,dp);G=G1∗Gp;sys=feedback(G,1);step(sys),grid;
程序运行后,绘制系统闭环阶跃响应曲线,如图9-16所示。由图可知,系统闭环稳定,与Nyquist稳定判据判断结论一致,而且系统时域性能优良。
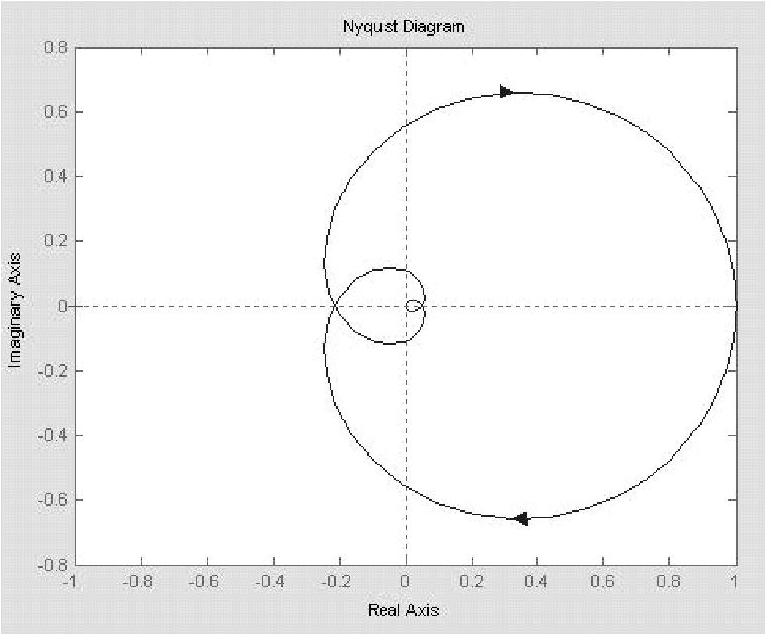
图9-15 系统的Nyquist曲线
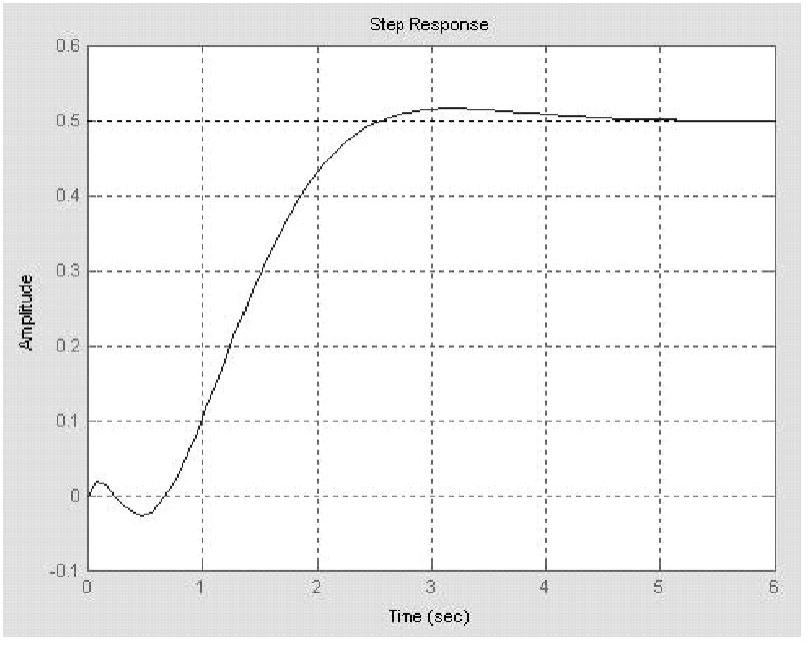
图9-16 系统闭环阶跃响应曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。