



根据自动控制原理[7],Nyquist稳定判据是:当系统开环G(s)的Nyquist曲线不穿过复平面(-1,j0)点且逆时针包围临界点(-1,j0)的圈数R等于系统开环传递函数的正实部极点数P时,则闭环系统 稳定;否则,就不稳定。应用Nyquist稳定判据必须先绘制出Nyquist曲线。
稳定;否则,就不稳定。应用Nyquist稳定判据必须先绘制出Nyquist曲线。
MATLAB系统绘制连续系统Nyquist曲线的函数为nyquist(),其调用格式为
nyquist(sys)
[re,im,w]=nyquist(sys)
nyquist(sys)函数用来计算并绘制系统Nyquist曲线,可用于SISO或者MIMO的连续时间系统。LTI对象sys可以是由函数tf()、zpk()、ss()中任何一个函数建立的开环系统模型。当函数命令为无等号左边输出变量格式时,函数在当前图形窗口中直接绘制出系统的Nyquist曲线。
需要特别注意,此时绘制的Nyquist曲线默认角频率ω范围为(-∞,+∞)。由自动控制理论知道,若令点s=jω及-∞≤ω≤0,即当点s沿虚轴从-j∞向j0运动时,求得轨线为

当点s=jω及0≤ω≤+∞时,即当点s沿虚轴从j0向j∞运动时,则得轨线为

这两部分轨线构成闭环系统在-∞≤ω≤+∞时的完整开环频率响应G(jω)H(jω),其中范围-∞≤ω≤0的G(-jω)H(-jω)部分曲线与范围0≤ω≤+∞的部分曲线G(jω)H(jω)对称于G(s)H(s)复平面的实轴。在自动控制原理的教科书中,一般只绘制0≤ω≤+∞时的幅相特性曲线,这仅是MATLAB中的函数命令nyquist()执行后绘制的对于横轴对称的幅相特性曲线关于0≤ω≤+∞范围的部分。
[re,im,w]=nyquist(sys)或者[re,im,w]=nyquist(sys,w)函数为带输出变量引用的函数,可计算系统在频率ω处的频率响应输出数据,而不绘制出曲线。其中,输出变量Re为频率响应的实部,Im为频率响应的虚部,ω是频率点。
【例6-9】 已知某系统开环传递函数为 ,试用
,试用
Nyquist稳定判据判断闭环系统的稳定性,并用阶跃响应曲线验证。
解:1)计算系统开环特征方程的根。
clear;P=[0.00050.315200];roots(P),
程序运行结果
ans=1.0e+002∗
-5.4644
-0.2678+0.0385i
-0.2678-0.0385i
即三个根均有负实部,都为稳定根。故系统开环特征方程的不稳定根的个数p=0。
2)绘制系统的开环Nyquist曲线,并用来判断闭环系统的稳定性。
clear;n=600;d=[0.00050.315200];GH=tf(n,d);nyquist(GH),grid;
程序运行后,绘制出系统的开环Nyquist曲线,如图6-13所示。由图可以看出,系统的Nyquist曲线不包围(-1,j0)点。而p=0,根据Nyquist稳定判据,其闭环系统是稳定的。这还可以用系统的阶跃响应曲线来验证。
3)用阶跃响应曲线验证。
clear;num=600;den=[0.00050.315200];key=2;stepp(key,num,den);
程序运行后计算出时域性能指标:超调量σ%=19.0185%、峰值时间tp=0.0673s、调节时间ts=0.1020s。并绘制系统单位阶跃响应曲线,如图6-14所示。由图可知,曲线略微超调后迅速衰减到响应终了值,对应的系统闭环不仅稳定,而且具有优良的性能指标,这就验证了Nyquist稳定判据判断结论的正确性。
【例6-10】 已知某系统结构图如图6-15所示,试用Nyquist稳定判据判断闭环系统的稳定性,并用阶跃响应曲线验证。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-13 系统开环Nyquist曲线
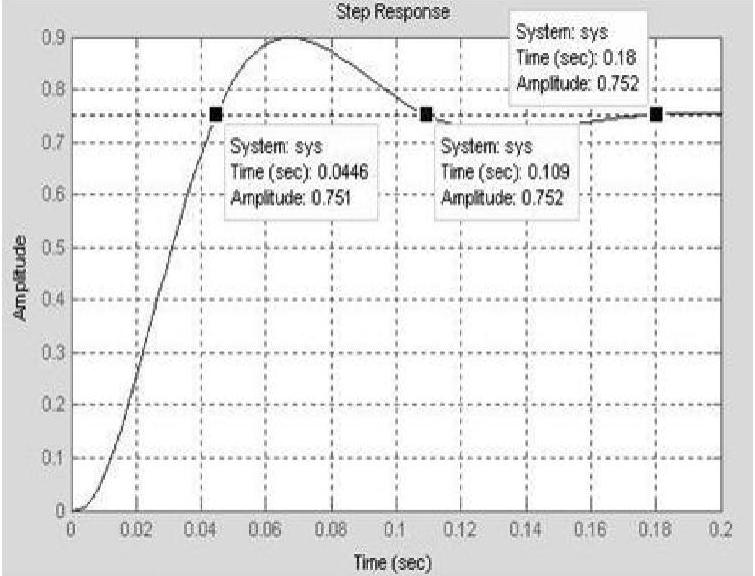
图6-14 系统单位阶跃响应曲线
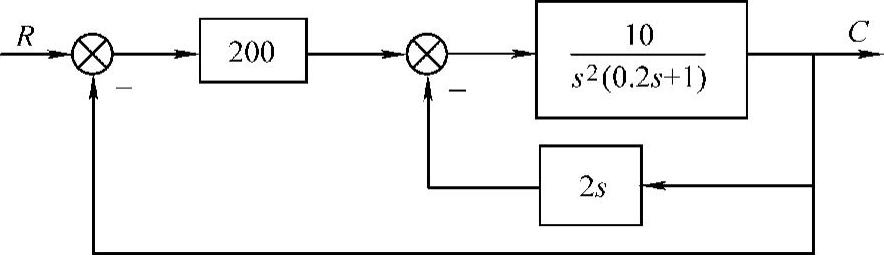
图6-15 系统结构图
解:1)求系统的开环传递函数。
clear;syms s;G1=10/(s^2∗(0.2∗s+1));H1=2∗s;phi1=G1/(1+G1∗H1);
G2=200;GH=factor(G2∗phi1);[n,d]=numden(GH);GH=n/d,
程序运行后得到 。
。
2)计算系统开环特征方程的根。
clear;P=[151000];roots(P),
程序运行结果
ans=0
-2.5000+9.6825i
-2.5000-9.6825i
即三个根均为稳定根,两个根有负实部。根据自动控制原理,零根当做稳定根,故系统开环特征方程的不稳定根的个数p=0。
3)绘制系统的开环Nyquist曲线,并用来判断闭环系统的稳定性。
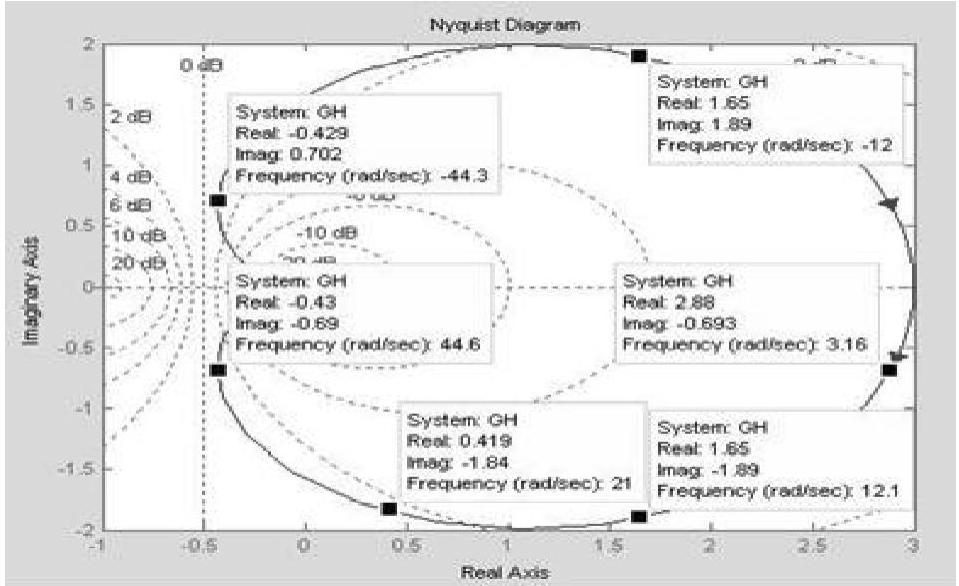
clear;n=[10000];d=[151000];GH=tf(n,d);nyquist(GH),grid;
程序运行后,绘制出系统的开环Nyquist曲线,如图6-16所示。由图可以看出,系统的Nyquist曲线顺时针方向包围(-1,j0)点一圈即-2π。而p=0,根据Nyquist稳定判据,其闭环系统是不稳定的。这还可以用系统的阶跃响应曲线来验证。
4)绘制系统仿真模型sx2L0610.mdl(见图6-17)与单位阶跃响应曲线验证系统的稳定性。
clear;[a,b,c,d]=linmod2( sx2L0610
sx2L0610 );sys=ss(a,b,c,d);t1=0:0.001:0.6;step(sys,t1),grid;
);sys=ss(a,b,c,d);t1=0:0.001:0.6;step(sys,t1),grid;
程序运行后,绘制出系统单位阶跃响应曲线,如图6-18所示。由图可知,曲线呈现为发散的振荡,对应系统闭环是不稳定的,这验证了Nyquist稳定判据判断结论正确。
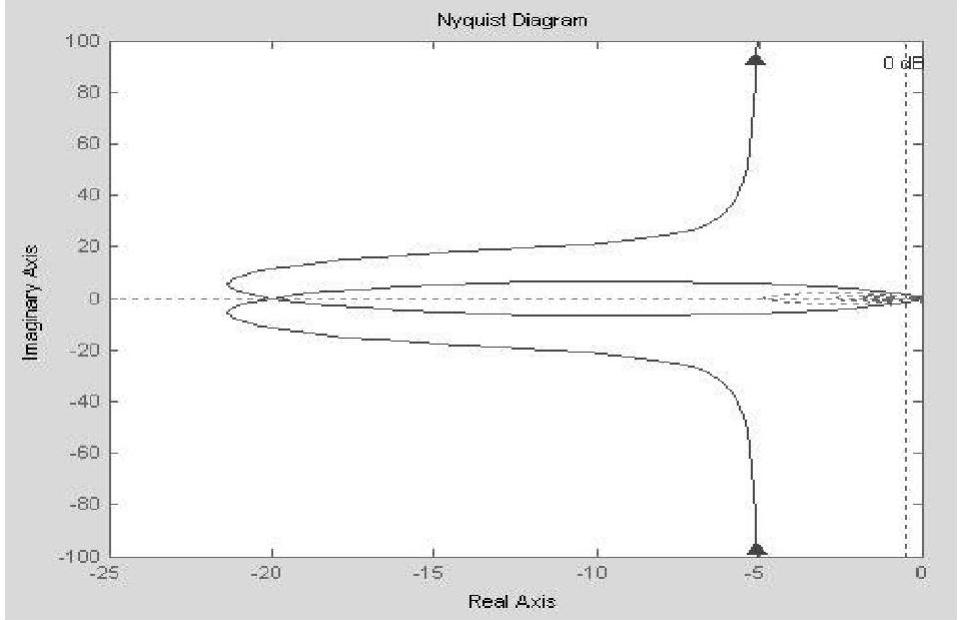
图6-16 系统的开环Nyquist曲线
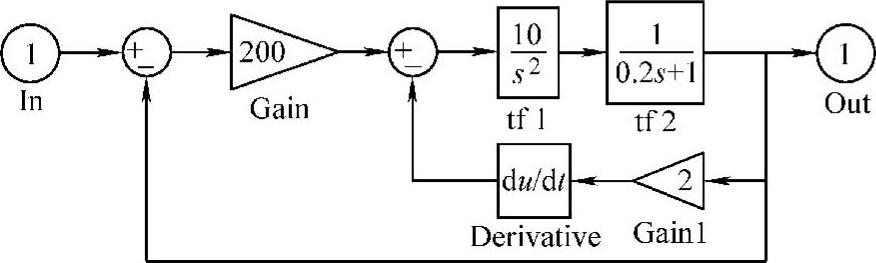
图6-17 系统仿真模型sx2L0610.mdl
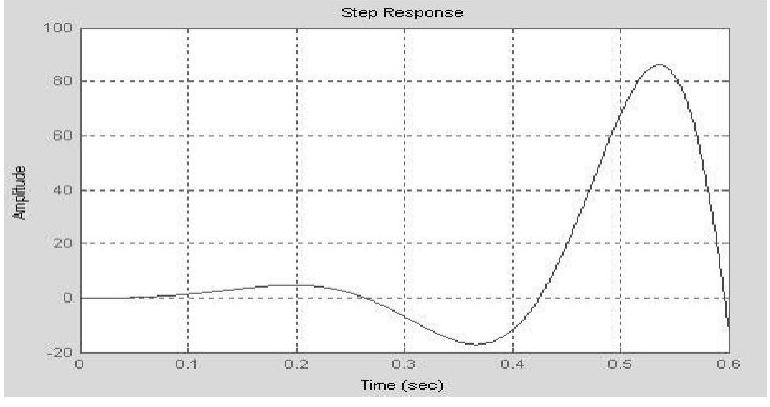
图6-18 系统的单位阶跃响应曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。