



有了系统的Bode图,就可以计算频域性能指标。从控制原理上说,当计算出的相角稳定裕度γ>0时,系统闭环稳定,否则不稳定。
在第9章中将要介绍的求系统模值裕度与相角裕度的MATLAB函数margin(),既可绘制系统Bode图,又能够计算频域性能指标。函数命令调用格式为
margin(sys)
[Gm,Pm,Wcg,Wcp]=margin(sys)
当不带输出参数引用函数时,margin()函数可在当前图形窗口中绘制出带有稳定裕度的Bode图。输入参数sys一般是用系统开环传递函数描述的系统模型,输出参数返回的Gm或Lh是系统模值裕度及其对应的-π穿越角频率Wcg或ωg、Pm或γ是相角裕度及其对应的剪切角频率Wcp或ωc。对于开环SISO系统,既可以是连续时间系统,也可以是离散时间系统。请看示例。
【例6-7】 已知某系统开环传递函数为 ,试用Bode图法判断
,试用Bode图法判断
闭环系统的稳定性,并绘制阶跃响应曲线予以验证。
解:1)用Bode图对闭环系统判稳。
clear;num=75∗[000.21];den=conv([10],[116100]);[Gm,Pm,Wcg,Wcp]=bod(num,den);
程序运行后绘制系统Bode图,如图6-8所示,并计算出频域指标:模值稳定裕度Gm或Lh=∞dB;-π穿越频率Wcg或ωg=∞rad/s;相角稳定裕度Pm或γ=91.6644°;剪切频率Wcp或ωc=0.7573rad/s。这些数据说明系统闭环不仅稳定,而且有很好的稳定裕度。
2)绘制系统单位阶跃响应曲线验证系统的稳定性。
clear;num=75∗[000.21];den=conv([10],[116100]);key=1;stepp(key,num,den);
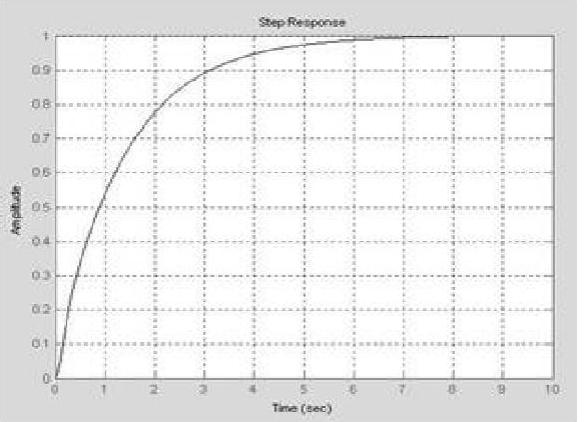
程序运行后,绘制出系统的单位阶跃响应曲线,如图6-9所示。闭环系统的响应曲线表明,系统不仅稳定,而且单位阶跃响应不超调,并有良好的性能指标。
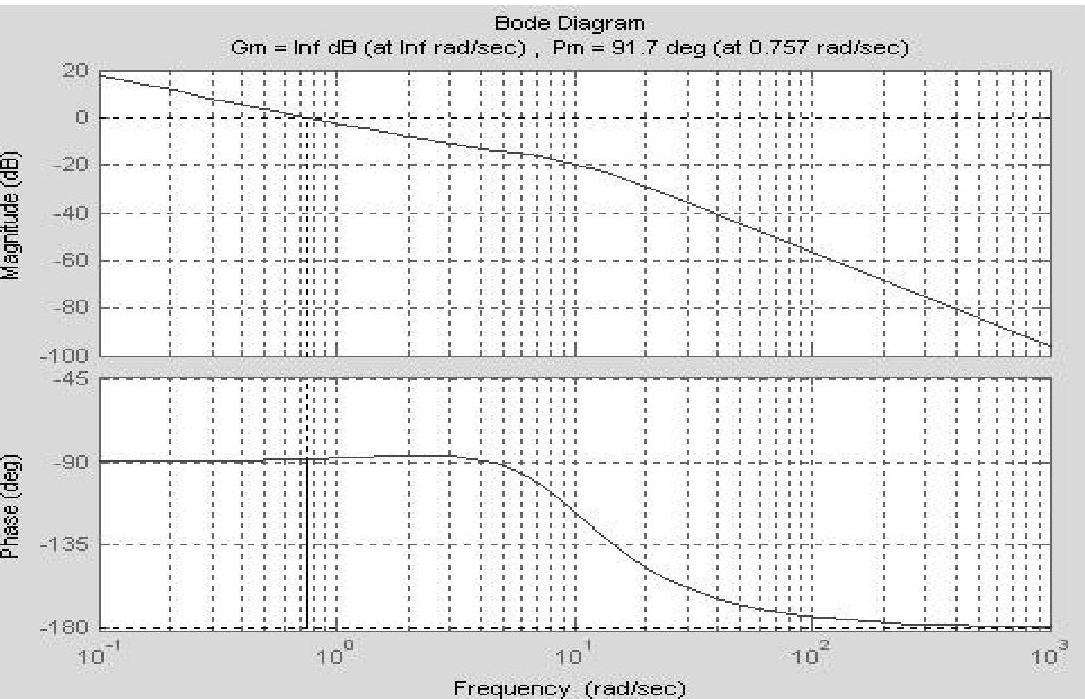
图6-8 系统Bode图
 (https://www.xing528.com)
(https://www.xing528.com)
图6-9 系统单位阶跃响应曲线
还可绘制系统仿真模型并借助模型(sx2L0607.mdl)验证以上单位阶跃响应是正确的。
【例6-8】 已知某系统开环传递函数为 ,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
解:1)用Bode图对闭环系统判稳。
clear;num=[0010];den=conv(conv([10],[21]),[10.51]);[Gm,Pm,Wcg,Wcp]=bod(num,den);
程序运行后绘制出系统的Bode图,如图6-10所示,并计算出系统频域性能指标:模值稳定裕度Lh=20log 0.075=-22.4988dB;相角稳定裕度γ=-136.3866°;-π穿越频率ωg=0.7067rad/s;剪切频率ωc=1.6210rad/s。指标模值稳定裕度与相角稳定裕度均为负值,数据说明系统闭环是不稳定的。
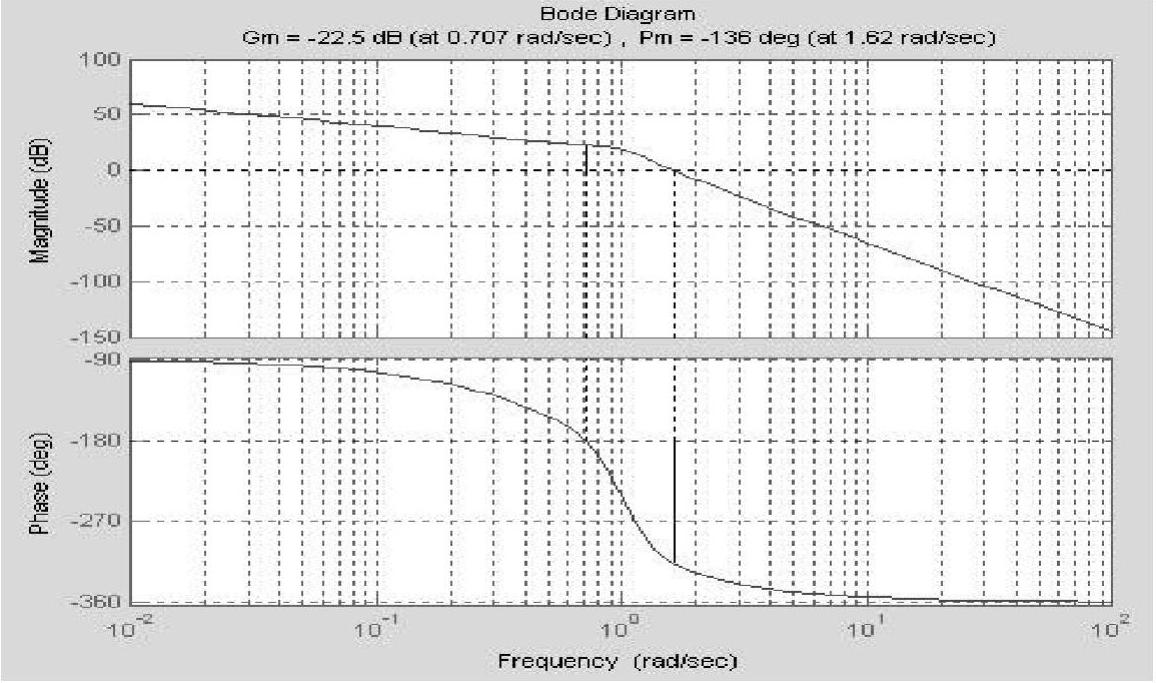
图6-10 系统Bode图
2)绘制系统仿真模型sx2L0608.mdl(见图6-11)与单位阶跃响应曲线验证系统的稳定性。
clear;[a,b,c,d]=linmod2( sx2L0608
sx2L0608 );sys=ss(a,b,c,d);t1=0:0.001:10;step(sys,t1),grid;
);sys=ss(a,b,c,d);t1=0:0.001:10;step(sys,t1),grid;
程序运行后,绘制出系统的单位阶跃响应曲线,如图6-12所示,闭环系统的单位阶跃响应是发散的振荡,表明系统不稳定,验证了用Bode图判定系统不稳定的结论。
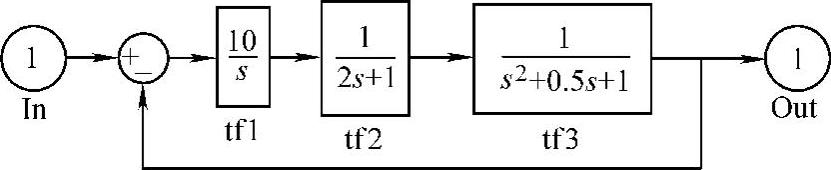
图6-11 系统仿真模型sx2L0608.mdl
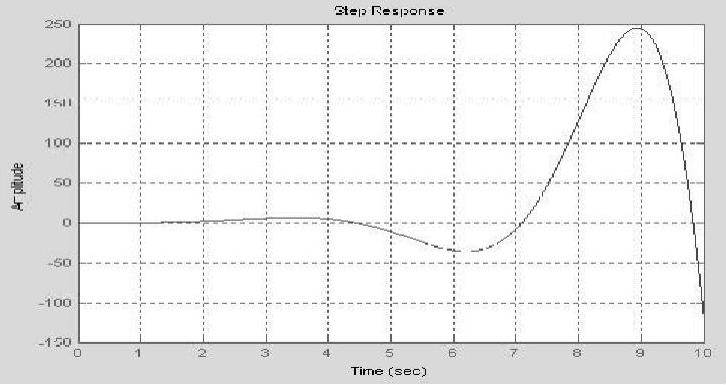
图6-12 系统的单位阶跃响应曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。