



根轨迹是开环系统中某个参数变动(0→∞)时闭环特征根在s平面上移动的轨迹。只要根轨迹在s平面纵坐标的左侧,对应的系统闭环就是稳定的。一旦根轨迹与s平面纵坐标相交或穿越纵坐标到其右侧,对应系统闭环就不稳定。
根轨迹分析的MATLAB实现将随后复习,本节先用其中的一个绘制系统零极点图的函数pzmap()。函数命令调用格式为
[p,z]=pzmap(sys)
pzmap(p,z)
第一种格式的输入变量sys是LTI对象。当不带输出变量引用时,pzmap()函数可在当前图形窗口中绘出系统的零极点图。在图中,极点用“×”表示,零点用“○”表示。当带有输出变量引用函数时,可返回系统零极点位置的数据,而不直接绘制零极点图。零点数据保存在变量z中,极点保存在变量p中。如果需要可以再用pzmap(p,z)绘制零极点图。
需要说明的是,如果对象sys是系统开环传递函数,pzmap(p,z)绘制的就是系统开环的零极点图。如果对象sys是闭环传递函数,pzmap(p,z)绘制的就是闭环系统的零极点图。
另外,两个MATLAB函数是用来绘制根轨迹图的rlocus()与计算给定一组根的系统根轨迹增益与其相应的极点的rlocfind()(参见根轨迹分析的MATLAB实现),本章解题都要用到。
【例6-5】 设一系统开环传递函数为 。1)试绘制该系统闭环零极点图,并对系统判稳。2)当系统开环传递函数为
。1)试绘制该系统闭环零极点图,并对系统判稳。2)当系统开环传递函数为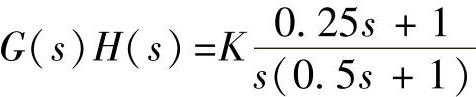 时,试绘制该系统常规根轨迹图,并对系统判稳。
时,试绘制该系统常规根轨迹图,并对系统判稳。
解:1)绘制系统闭环零极点图并对系统判稳。clear;num=[0.251];den=[0.510];[p,z]=pzmapp(num,den);
程序运行后绘制系统闭环零极点图如图6-3所示,在图上单击极点“×”与零点“○”,就会出现三个文本框,计算机直接标出该点的“Zero”(零点坐标)、该点的“Pole”(极点坐标)、对应系统的“Dmping”(阻尼系数)、“Overshoot”(超调量)、“Frequency”(无阻尼自然振荡角频率)等参数。还计算出系统闭环极点p1=-1.25+j0.6614、p2=-1.25-j0.6614,闭环零点z=-4,计算数据与图示数据两者一致,都表明闭环系统是稳定的。
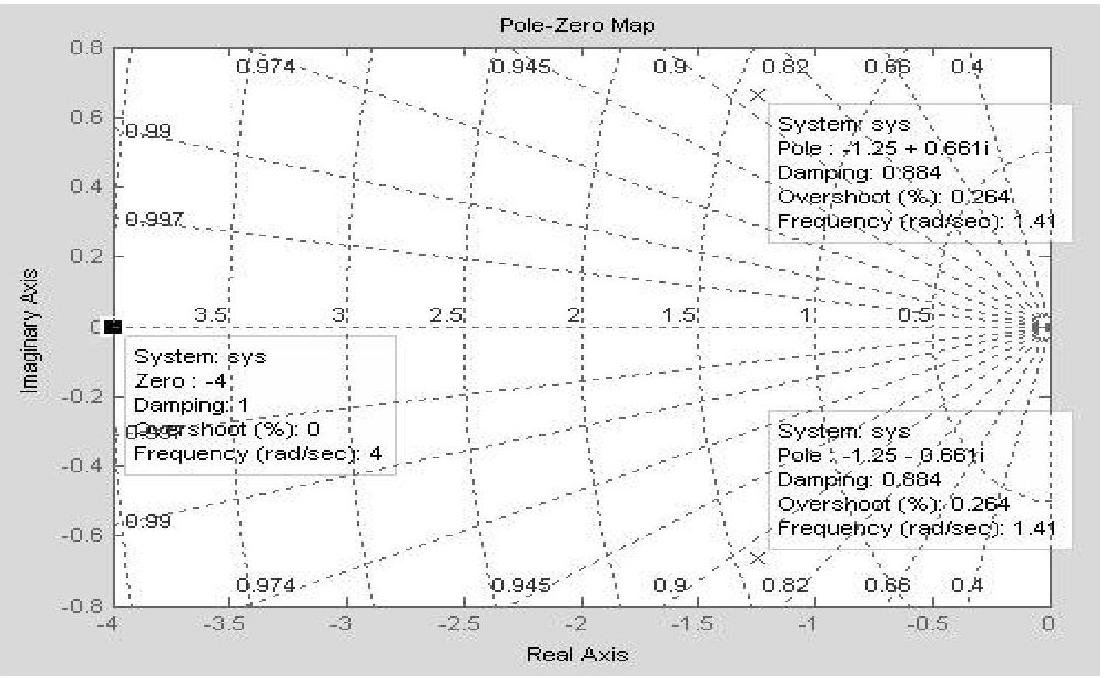
图6-3 系统闭环零极点图
2)当系统的 ,绘制该系统根轨迹图并对系统判稳。clear;num=[0.251];den=conv([10],[0.51]);key=1;rlocuss(key,num,den);
,绘制该系统根轨迹图并对系统判稳。clear;num=[0.251];den=conv([10],[0.51]);key=1;rlocuss(key,num,den);
程序运行后绘制系统根轨迹图,如图6-4所示。单击根轨迹图上某一点,也会出现一个文本框,计算机直接标出该点的“Gain”(K值)、该点“Pole”(坐标)、对应系统的“Dmping”(阻尼系数)、“Overshoot”(超调量)、“Frequency”(无阻尼自然振荡角频率)等参数(见图6-4)。而且在同一根轨迹图上,可用光标多次单击图上的不同点,显示不同点的参数。由于光标指点的不确定性,显示器显示的数据有误差。
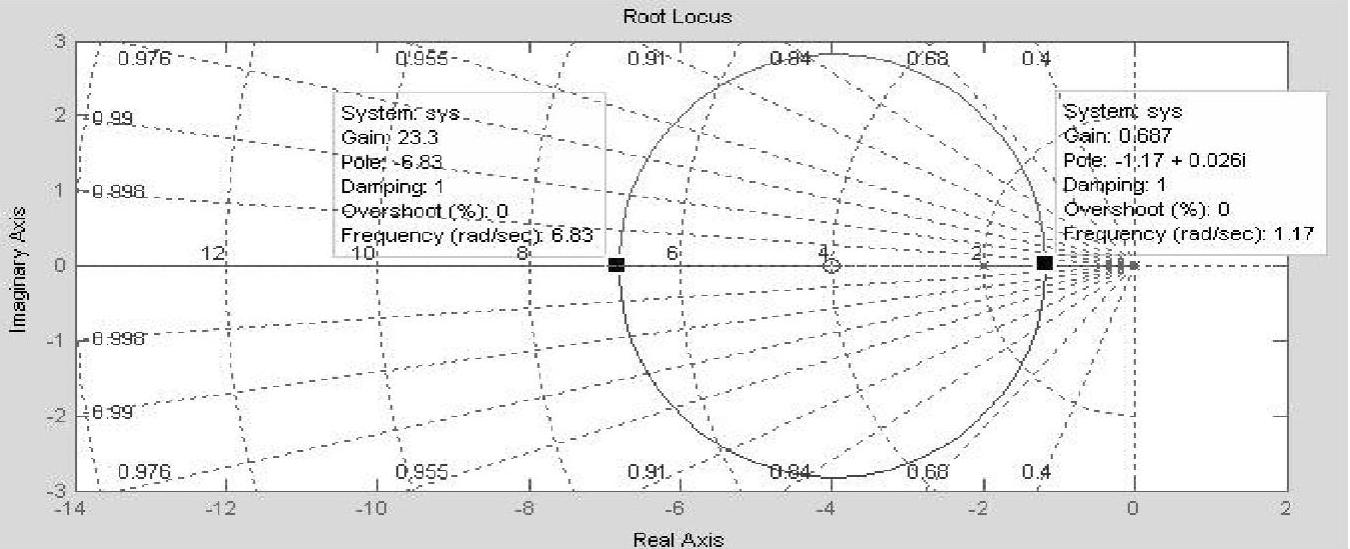
图6-4 系统根轨迹图
该系统根轨迹起始于两个开环极点:p1=0与p2=-2,在横轴上根轨迹相对而行,经汇合点d1=-1.172又分离成两半圆,在横轴上汇合点d2=-6.828又分离,一支根轨迹指向开环零点z1=-4,另一支指向-∞。当参数K(0→∞)变动时,根轨迹均在s平面纵坐标的左侧,对应的系统闭环总是稳定的。
读者还可以运行以上key=2时的程序,程序中有一条带鼠标操作的函数命令rlocfind()。带左端输出的函数命令执行后,可在图形窗口根轨迹图中显示十字形光标,当选择根轨迹上某一点(即十字形光标指向根轨迹上该点)时,其相应的增益由变量k记录,与此增益相关的所有极点记录在变量polse中。从显示所有极点的数值(即位置),就可判断系统的稳定性。
按以上叙述对根轨迹图进行两次操作(可多次操作),得两个分离点:d1=-1.172、d2=-6.828,对应着开环增益K1=0.686、K2=23.31。
当在根轨迹实轴上第一区段即自系统开环极点p1=0、p2=-2指向分离点d1=-1.172的区段时,对应的0≤K≤0.686;当在实轴上第二区段即自分离点d2=-6.828指向开环零点z1=-4与无穷远时,对应的23.31≤K≤∞。这都对应着系统闭环阶跃响应无超调。
当在根轨迹圆上时,系统闭环特征方程出现共轭复根,意味着系统闭环阶跃响应有超调,但系统闭环还是稳定的。
【例6-6】 设一系统开环传递函数为 ,1)试绘制该系统闭环零极点图,并对系统判稳。2)当系统开环传递函数为
,1)试绘制该系统闭环零极点图,并对系统判稳。2)当系统开环传递函数为 时,试绘制该系统的常规根轨迹图,再对系统判稳并用阶跃响应曲线验证。
时,试绘制该系统的常规根轨迹图,再对系统判稳并用阶跃响应曲线验证。
解:本题解法同上题。
1)绘制系统闭环零极点图并对系统判稳。clear;num=[1];den=conv(conv([10],[11]),[0.51]);[p,z]=pzmapp(num,den);
程序运行后得到系统闭环极点为p1=-2.5214、p2.3=-0.2393±0.8579j,闭环零点为空即没有闭环零点。程序运行后绘制该系统闭环的零极点图,如图6-5所示,计算数据与图示两者一致,即闭环极点都在s平面纵坐标的左侧,表明闭环系统是稳定的。(https://www.xing528.com)
图6-5 系统闭环零极点图
2)系统的 绘制该系统根轨迹图并对系统判稳。
绘制该系统根轨迹图并对系统判稳。
clear;num=[1];den=conv([110],[0.51]);key=1;rlocuss(key,num,den);
程序运行后绘制系统根轨迹图,如图6-6所示。再单击根轨迹图上的4个点,出现4个文本框(见图6-6)。由于光标指点的不确定性,显示器显示的数据有误差。
读者也可以运行以上key=2时的程序,当选择根轨迹图上的点为(-6)时,实际鼠标指点为(-6.0296-0.0155i),对应的k=61.1035,此时系统3个极点为p1=-6.0296、p2.3=1.5148±j4.2395。
在此提一个问题:如何验证以上数据对本系统是正确的?

图6-6 系统根轨迹图
当参数K(0→3)变动时,根轨迹均在s平面纵坐标的左侧,对应的系统闭环是稳定的。一旦根轨迹穿越纵坐标到达其右侧,对应的K>3,那么系统闭环就不稳定。
当在根轨迹实轴上的区段时,对应着系统闭环阶跃响应无超调,系统闭环稳定。当不在根轨迹实轴上的区段时,系统闭环特征方程出现了共轭复根,意味着系统闭环阶跃响应有超调,但系统闭环还是稳定的。
3)当系统的K=1.2、K=3与K=4时,用程序绘制系统闭环单位阶跃响应曲线。
clear;t=0:0.01:30;
n1=[1];d1=conv(conv([10],[11]),[0.51]);
n=1.2∗n1;s1=tf(n,d1);sys=feedback(s1,1);
figure(1);step(sys,t);grid;pause;
n=3∗n1;s1=tf(n,d1);sys=feedback(s1,1);
figure(2);step(sys,t);grid;pause;
n=4∗n1;s1=tf(n,d1);sys=feedback(s1,1);
figure(3);step(sys,t);grid;
程序运行后,绘制出系统的K=1.2、K=3与K=4时,单位阶跃响应曲线如图6-7所示。由图6-7a可见,当K=1.2时,系统单位阶跃响应曲线为衰减的振荡;当K=3时即图6-7b,系统的单位阶跃响应曲线为等幅振荡,对应着系统临界稳定;当K=4时即图6-7c,系统的单位阶跃响应曲线为发散的振荡,对应着系统不稳定。这完全验证了以上运算的结论。

图6-7 系统单位阶跃响应曲线
在此再提一个问题:如何分别绘制系统K=1.2、K=3与K=4时的系统仿真模型(sx2L0606a.mdl、sx2L0606b.mdl、sx2L0606c.mdl)并借助仿真模型验证以上单位阶跃响应是正确的?
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。