



可以用另一种判据——Lienard-Chipard稳定判据判定系统稳定性。其判据是:对于线性定常系统的特征方程D(s)=a0sn+a1sn-1+…+an-1s+an=0(a0>0),系统稳定的必要且充分条件是:特征方程的各项系数均大于0,且Hurwitz行列式中奇数阶子行列式(即D1,D3,D5…)或偶数阶子行列式(即D2,D4,D6…)大于0。
需要指出的是,Hurwitz行列式在《控制系统MATLAB计算及仿真》Hurwitz稳定判据中已经说明。
【例6-2】 试确定图6-1所示系统参数τ取何值能使系统稳定。
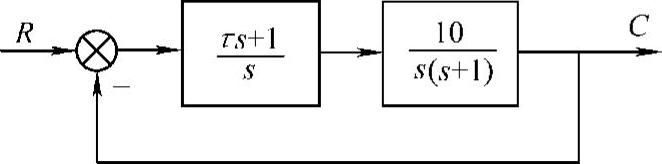
图6-1 三阶系统结构图
解:1)求系统闭环特征式。
clear;syms s tau G1 G2 G D n d phi;
G1=(tau∗s+1)/s;G2=10/(s∗(s+1));G=G1∗G2;
phi=factor(G/(1+G));[n,d]=numden(phi);D=d,
程序运行结果D=s^3+s^2+10∗tau∗s+10。
2)用Lienard-Chipard判据判定系统稳定性。要系统稳定,首先特征方程各项系数均应大于0,系数a0=1、a1=1、a2=10τ、a3=10。所以a2=10τ>0,即τ>0。
其次,因系统最高阶次n=3,则可计算Hurwitz行列式中偶数阶子行列式(即D2)应大于0。用程序计算二阶子行列式。
clear;syms a1 a2 a3 a0 tau D2;a0=1;a1=1;
a2=10∗tau;a3=10;A=[a1 a3;a0 a2];D2=det(A),
程序运行后得到D2=10∗tau-10,即要系统稳定,必须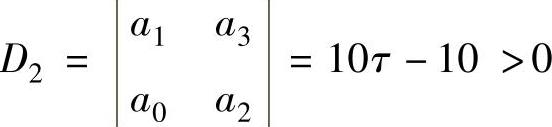 ,所以τ>1。综合结果为τ>1。
,所以τ>1。综合结果为τ>1。
【例6-3】 设控制系统的开环传递函数为 ,试确定使闭环系统稳定的K与T的取值范围。
,试确定使闭环系统稳定的K与T的取值范围。
解:1)求系统闭环特征式。
clear;syms s K T GH D n d phi;GH=K∗(s+1)/(s∗(T∗s+1)∗(2∗s+1));
phi=factor(GH/(1+GH));[n,d]=numden(phi);D=d;D=collect(D,s^2),程序运行结果D=2∗T∗s^3+(2+T)∗s^2+(K+1)∗s+K。
2)用Lienard-Chipard稳定判据判定系统稳定性。
因a0=2T、a1=2+T、a2=K+1、a3=K,故a0=2T>0,T>0;a1=2+T>0,T>-2;a2=K+1>0,K>-1;a3=K>0,K>0。
用程序计算二阶子行列式:(https://www.xing528.com)
clear;syms a1 a2 a3 a0 K T D2;a0=2∗T;a1=2+T;a2=K+1;a3=K;
A=[a1 a3;a0 a2];D2=det(A);D2=collect(D2,K),
程序运行结果D2=(2-T)∗K+2+T,系统要稳定,需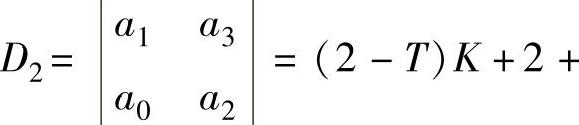 T>0,所以2+T>(T-2)K,即0
T>0,所以2+T>(T-2)K,即0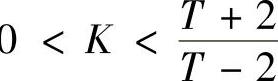 ,同时还要T>0。
,同时还要T>0。
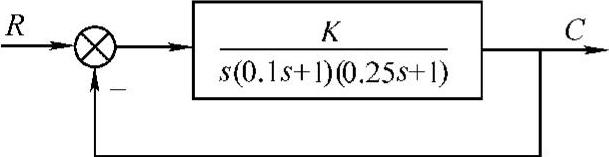
图6-2 三阶系统结构图
【例6-4】 三阶系统结构图如图6-2所示,要求闭环系统特征根全位于s=-1垂线之左,试确定参数K与ζ的稳定域。
解:1)求系统闭环特征式。
clear;syms s K G H D n d phi;G=K/(s∗(0.1∗s+1)∗
(0.25∗s+1));H=1;
phi=factor(G/(1+G∗H));[n,d]=numden(phi);D=d,
程序运行结果D=s^3+14∗s^2+40∗s+40∗K。
2)要求闭环系统特征根全位于s=-1垂线之左,可令s=z-1(即s平面的0是z平面的1,或者s平面的-1是z平面的0),再求解以z为变量的方程。
clear;syms z s K D;D=s^3+14∗s^2+40∗s+40∗K;D=factor(subs(D,[s],[z-1])),
程序运行结果D=z^3+11∗z^2+15∗z-27+40∗K。
3)用Lienard-Chipard稳定判据判定系统稳定性。
要系统稳定,首先,特征方程的各项系数均应大于0,有系数a0=1、a1=11、a2=15、a3=40K-27。所以a3=40K-27>0,即 。
。
其次,因系统最高阶次n=3,则可计算Hurwitz行列式中偶数阶子行列式(即D2)应大于0。用程序计算二阶子行列式。
clear;syms a1 a2 a3 a0 K D2;a0=1;a1=11;a2=15;a3=40∗K-27;A=[a1 a3;a0 a2];D2=det(A),
程序运行结果D2=192-40∗K。
即要系统稳定必须 ,故
,故 。综合两者为0.675<K<4.8。
。综合两者为0.675<K<4.8。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。