



根据系统的Simulink动态结构图模型,可用linmod()或linmod2()函数命令对结构图模型提取一个平衡工作点处的线性模型。有了线性模型,在函数指令方式下的时域仿真不会有任何问题。请注意,在动态结构图模型中,输入与输出环节必须采用“In”与“Out”模块,因为进行何种仿真是由命令确定的。
【例5-33】 已知系统动态结构图仍如图5-29所示。要求系统阶跃响应σ%=20%,tp=1s。试确定系统参数K与τ,计算系统单位阶跃响应特征量ζ、ωn、tp、ts和振荡次数N,并绘制单位阶跃响应曲线。
解:1)求系统闭环传递函数。
clear;syms s K tau1 omegan G H phi;
G=K/(s∗(s+1));H=1+tau1∗s;phi=factor(G/(1+G∗H)),
程序运行结果为 。
。
2)求系统参数ζ、ωn与K。
clear;sigma=0.2;tp=1;[zeta]=sitoze(sigma);
omegan=pi/(tp∗sqrt(1-zeta^2)),K=omegan^2,b=2∗zeta∗omegan,
程序运行结果为ζ=0.4559、ωn=3.5299rad/s、K=12.4599、2ζωn=3.2189,那么

3)求系统参数τ与振荡次数N(5%)。
clear;zeta=0.4559;omegan=3.5299;delta=0.05;[N]=can(1,zeta,delta);
[tau1]=solve( 2∗0.4559∗3.5299=1+12.4599∗tau1
2∗0.4559∗3.5299=1+12.4599∗tau1 );tau1=vpa(tau1,2),(https://www.xing528.com)
);tau1=vpa(tau1,2),(https://www.xing528.com)
程序运行结果为τ1=0.18s、振荡次数N(1.1417)=1、Δ=0.05。
4)绘制系统闭环传递函数对应的单位负反馈等效动态结构图模型,如图5-30所示。
5)验算系统单位阶跃响应特征量tp、ts、σ%,并绘制单位阶跃响应曲线。
clear;[a,b,c,d]=linmod2( sx2L0533
sx2L0533 );
);
sys=ss(a,b,c,d);t1=0:0.001:4;step(sys,t1),grid;
[y,t]=step(sys);perf(2,y,t);
程序运行结果为σ%=19.9436%、tp=0.9876s、ts(2%)=1.5143s,并绘制出系统单位阶跃响应曲线如图5-31所示。
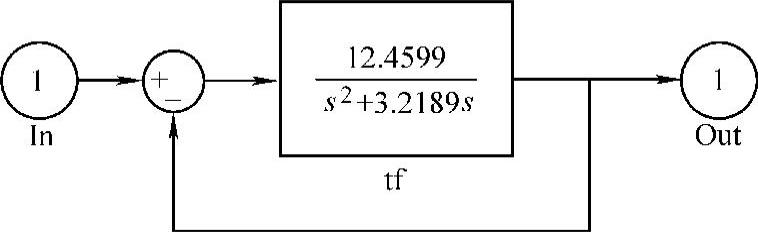
图5-30 系统动态模型sx2L0533.mdl

图5-31 系统单位阶跃响应曲线
若将模型sx2L0533.mdl中的“In”与“Out”模块分别用单位阶跃信号“Step”与示波器“Scope”模块代替(参见sx2L0533a.mdl),请读者绘制模型并仿真。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。