



在MATLAB里,可用4种数学模型表示控制系统,其中前三种用数学表达式描述即已经介绍的:传递函数模型、零极点增益模型与状态空间模型。每种模型都有连续系统的及离散系统的两种类别。基于传递函数的图形化形式动态结构图就是MATLAB里的Simulink结构图,为第4种数学模型。
已经说明过,实际工程里要解决自动控制问题所需用的数学模型与该问题所给定的已知数学模型往往不一致;或者要解决问题最简单而又最方便的方法所用到的数学模型与该问题所给定的已知数学模型不同,此时,就需要对自控系统的数学模型进行转换。
一个复杂的控制系统建立后,不是要对它计算就是要对其仿真。这就是说,要对系统化简进而求其总闭环传递函数。在《控制系统MATLAB计算及仿真》中,已经介绍了环节串联连接、并联连接、反馈连接的化简规则。自动控制原理里,也讨论过信号综合点(或叠加点)与引出点越过传递函数方框前移与后移的等效变换规则,还有信号综合点相互之间与信号引出点相互之间移动的等效变换规则。这些基本规律非常重要,在《控制系统MAT-LAB计算及仿真》与本书里会多处用到。
【例4-6】 已知一造纸工业中的网前箱为一加压液流箱系统。该系统的状态变量是箱中的液位h(t)与料浆的总压头H(t),输入变量是料浆流入量u1(t)与空气流入量u2(t),输出变量就是状态变量H(t)与h(t)本身。系统状态空间模型为
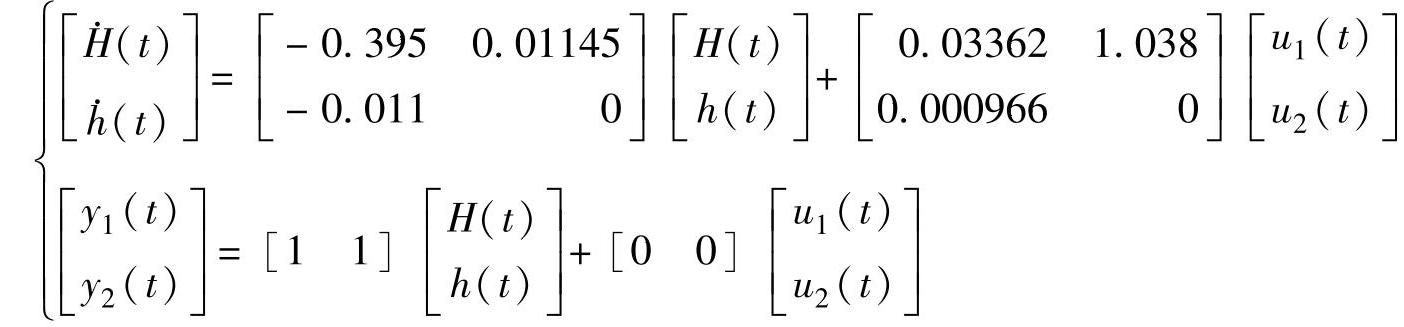
试求多个输入到输出的传递函数模型与多个输入到输出的零极点增益模型。
解:给出以下调用自编函数ssto2.m的程序求解。
clear;A=[-0.39500.01145;-0.0110];
B=[0.033621.038;0.0009660];C=[11];D=[00];
key=1;G=ssto2(key,A,B,C,D);
key=2;G=ssto2(key,A,B,C,D);
程序执行后得到:
系统从第一个输入到输出的传递函数模型为

从第二个输入到输出的传递函数模型为

从第一个输入到输出的零极点增益模型为

从第二个输入到输出的零极点增益模型为

【例4-7】设一系统传递函数 ,试将其转换为零极点增益模型与状
,试将其转换为零极点增益模型与状
态空间模型,并予验证。
解:1)给出以下调用自编函数tfto2.m的程序求解。
clear;n=[624];d=[16116];
key=1;G=tfto2(key,n,d);
key=2;G=tfto2(key,n,d);
程序运行后得到系统零极点增益模型 ,还有系统的状态空间模型
,还有系统的状态空间模型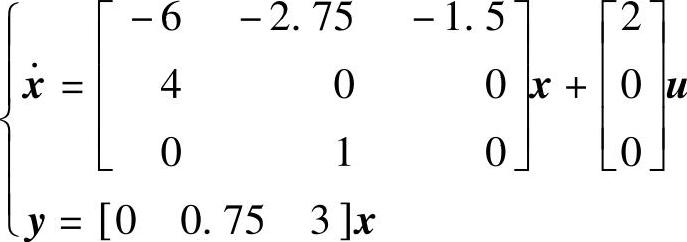 。(https://www.xing528.com)
。(https://www.xing528.com)
2)给出以下调用自编函数zpkto2.m的程序验证。
clear;k=6;z=-4;p=[-1,-2,-3];
key=1;G=zpkto2(key,z,p,k);
3)给出以下调用自编函数ssto2.m的程序验证。
clear;A=[-6-2.75-1.5;400;010];B=[2;0;0];C=[00.753];
D=0;key=1;G=ssto2(key,A,B,C,D);
key=2;G=ssto2(key,A,B,C,D);
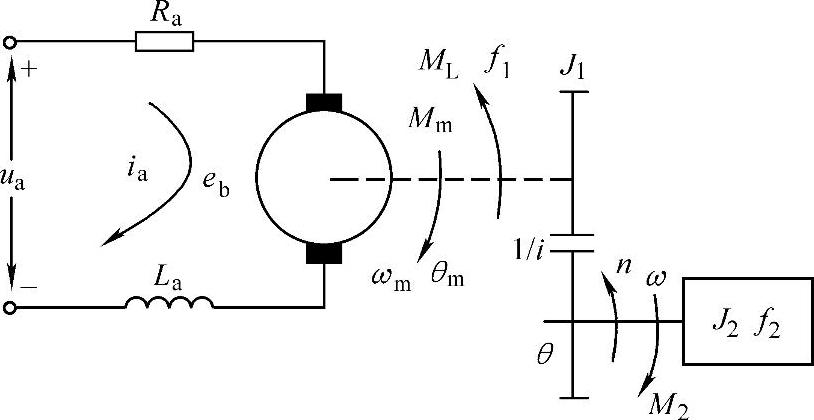
图4-7 他励直流电机拖动原理图
【例4-8】 如图4-7所示电枢控制的他励直流电机拖动系统,试建立输出轴转角θ与电枢电压ua之间的传递函数。解:1)对图4-7他励直流电机拖动,假设:ua、ia、Ra、La、eb分别为电枢电压、电流、电阻、电感与反电动势;Mm、θm、ωm、J、f分别为电机转轴的电磁力矩、转角、角速度、转动惯量与黏性摩擦系数;θ、i分别为负载转角、减速器的减速比。
那么系统有动态方程


2)对以上关系式变换方程组消去中间变量求θ与ua之间的关系(若ML=0)。
clear;syms Ua Ra La Ia Eb Kb omegam s J f Cm zetam i zeta Mm ML;
[zetam]=solve( zeta=zetam/i
zeta=zetam/i ,
, zetam
zetam );
);
omegam=s∗zetam;Ia=solve( Mm=Cm∗Ia
Mm=Cm∗Ia ,
, Ia
Ia );
);
ML=0;Ia=subs(Ia,[Mm],[ML+f∗omegam+J∗s∗omegam]);
Eb=Kb∗omegam;Ua=Ra∗Ia+La∗s∗Ia+Eb,
程序运行结果
Ua=Ra∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+La∗s∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+Kb∗s∗zeta∗i
3)输出轴转角θ与电枢电压ua之间的传递函数。
clear;syms Ua Ra La Ia Eb Kb omegam s J f Cm zetam i zeta Mm ML;
[zeta]=solve( Ua=Ra∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+La∗s∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+Kb∗s∗zeta∗i
Ua=Ra∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+La∗s∗(f∗s∗zeta∗i+J∗s^2∗zeta∗i)/Cm+Kb∗s∗zeta∗i ,
, zeta
zeta );G=zeta/Ua,
);G=zeta/Ua,
程序运行后得到

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。