



微分方程是自动控制系统最原始的数学模型,它反映系统动态运行规律。时域分析中要介绍应用拉普拉斯变换定义传递函数,还有基于传递函数图形化形式的动态结构图,即微分方程、传递函数、动态结构图是控制系统的三类基本数学模型。请看以下示例。
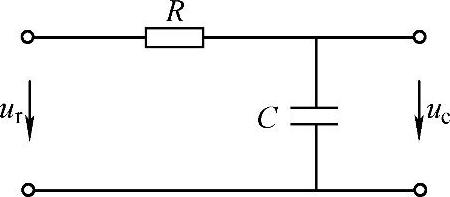
图4-1 阻容RC网络
【例4-1】 阻容RC网络如图4-1所示,试求以uc作输出,以ur作输入的微分方程与传递函数模型。
解:1)用符号运算的程序列写微分方程。
clear;syms i ur ucp uc R C;
ur=R∗i+uc;ur=subs(ur,i,C∗ucp),
程序运行后得到微分方程
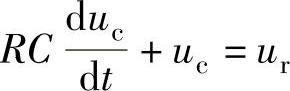
需要说明:①由 有
有 ;②ucp即为
;②ucp即为 。
。
2)用RC复阻抗的分压系数求传递函数模型。
clear;syms R C s Ur Uc;
Uc=simple(Ur∗(1/(s∗C))/(R+1/(s∗C)));G=Uc/Ur,
程序运行后得到传递函数为
需要说明:①R的复阻抗ZR=R;②C的复阻抗 。
。
【例4-2】RLC网络如图4-2所示,试求以uc作输出,以ur作输入的微分方程与传递函数
模型。
解:1)用符号运算的程序列写微分方程。
clear;syms i ip ur ul ucpp ucp uc R L C;
ip=C∗ucpp;ul=L∗ip;
ur=R∗i+ul+uc;ur=subs(ur,i,C∗ucp),
程序运行后得到微分方程

需要说明:①电感两端的电压ul=L∗ip即 ;
;
②有 ,
, 写成ip=C∗ucpp;③ucpp即为
写成ip=C∗ucpp;③ucpp即为 。
。
2)符号运算求传递函数模型。
clear;syms R C L s Ur Uc;
Uc=simple(Ur∗(1/(s∗C))/(R+s∗L+1/(s∗C)));G=factor(Uc/Ur),
程序运行后得到传递函数

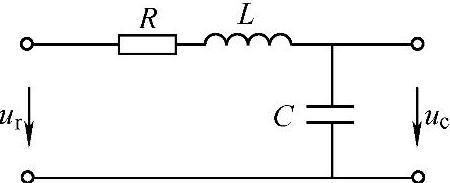
图4-2 RLC网络
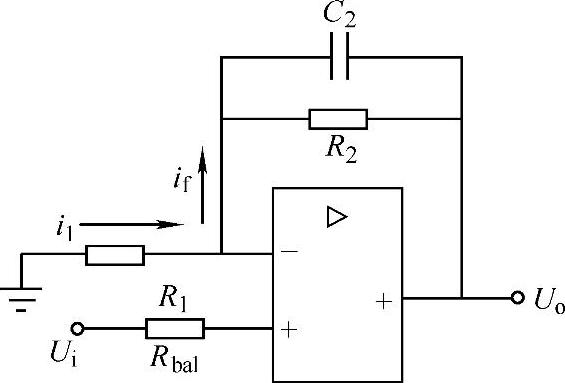
图4-3 同相输入端输入的调节器
【例4-3】 图4-3为控制系统校正时用到的同相输入端输入、反相输入端接地的调节器。试求其传递函数。
解:利用输出与输入复阻抗之比求系统传递函数。
设输入回路的复阻抗为Z1=R1。反馈回路的复阻抗Z2,那么,有
即得
图4-3为运算放大器的同向输入,反向输入端不是“虚地”。根据运算放大器的“虚短”与“虚断”,那么U-=U+=Ui,i1=if,即有
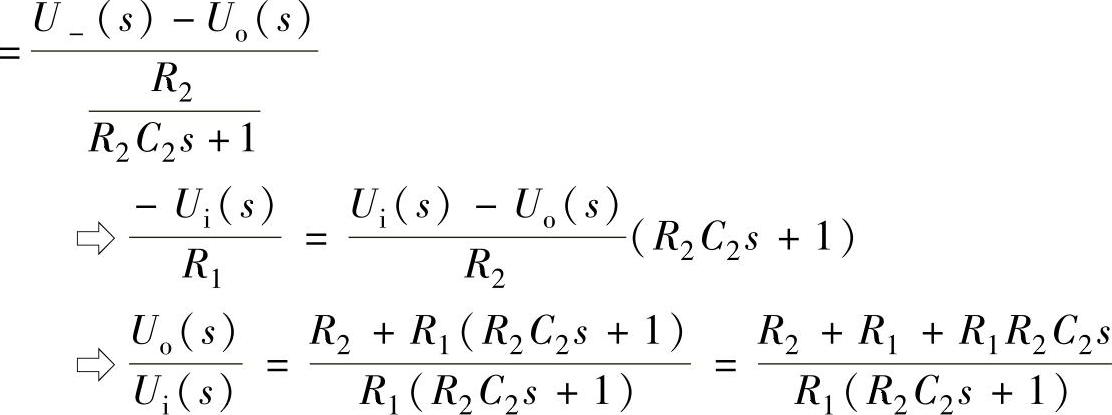
则同相输入端输入、反相输入端接地的调节器传递函数为

式中, 、
、 、T=R2C2,而平衡电阻R0=R1//(R2+R3)。
、T=R2C2,而平衡电阻R0=R1//(R2+R3)。
【例4-4】 试推导负反馈连接的等效传递函数 与
与 。
。
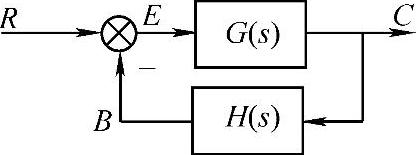
图4-4 负反馈连接(https://www.xing528.com)
解:1)对负反馈连接(见图4-4)求 。
。
clear;syms R C E B G H;
B=H∗C;E=R-B;C=E∗G;C=expand(C),
程序运行后得到
C=G∗R-G∗H∗C
移项做恒等变换得到

2)对图4-5求 。
。
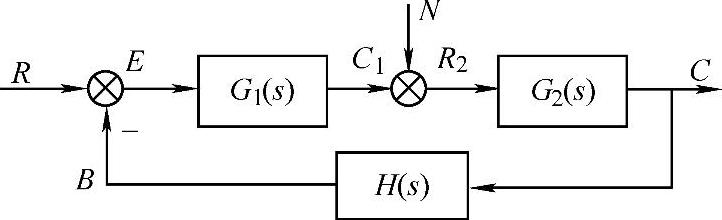
图4-5 带扰动的负反馈连接
clear;syms N C C1 R R2 E B G1 G2 H;
B=H∗C;R=0;E=R-B;C1=E∗G1;R2=C1+N;
C=R2∗G2;C=expand(C),
程序运行结果
C=-G2∗H∗C∗G1+G2∗N
移项做恒等变换得到

对于较复杂的系统,可能由多个微分方程组成的方程组来描述。要计算其指定输出与输入间的传递函数时,先将系统微分方程组改写成象方程组,其要点是:将微分方程中 换成s,将
换成s,将 换成s2,将∫dt换成
换成s2,将∫dt换成 ,将时域量换成对应的复域量的象方程组,注意两种方程组的结构、项数、系数与阶次完全一致;再对对象方程组求解,指定输出量与输入量间的关系式;最后求传递函数G
,将时域量换成对应的复域量的象方程组,注意两种方程组的结构、项数、系数与阶次完全一致;再对对象方程组求解,指定输出量与输入量间的关系式;最后求传递函数G 。
。
根据系统的象方程组可以绘制系统动态结构(方框)图。其方法如下:
①根据传递函数的定义,按“输入×传递函数方框=输出”绘制每一个传递函数方框。
②以系统的输入作为第一个环节的输入,将第一个环节的输出作为第二个环节的输入,依此类推,以系统的输出作为最后一个环节的输出。按此方法用带箭头的信号线依此连接。
③关注信号综合(叠加)点的信号个数与符号,特别是构成闭环的负反馈信号。
④关注信号引出点的位置以及信号引出的去向。
⑤将图中相同的信号直接用线连接。
⑥在带箭头的信号线旁标注为信号的Laplace变换量。请看以下示例。
【例4-5】 已知系统微分方程为
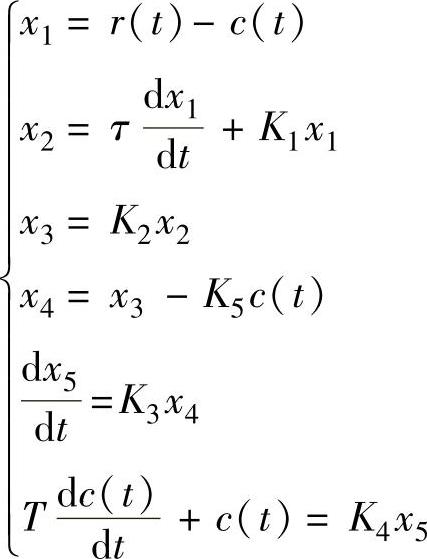
式中,r(t)是输入量;c(t)是输出量;x1,x2,x3,x4,x5为中间变量;K1,K2,K3,K4,K5,T,τ为常量。试绘制系统动态结构图,并求传递函数 。
。
解:1)绘制系统动态结构图如图4-6所示。
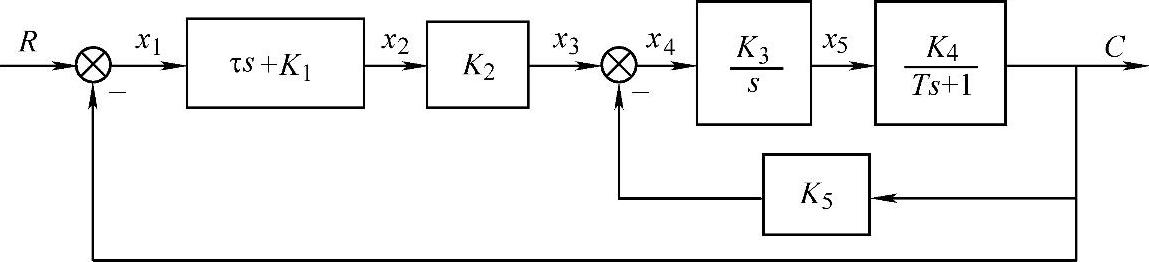
图4-6 双闭环系统
2)用符号运算的程序求传递函数 。
。
①求R(s)。
clear;syms s C R X1 X2 X3 X4 X5 K1 K2 K3 K4 K5 T tau;
X5=(T∗s+1)∗C/K4;X4=s∗X5/K3;X3=X4+K5∗C;
X2=X3/K2;X1=X2/(tau∗s+K1);R=C+X1,
程序运行结果
R=C+(s∗(T∗s+1)∗C/K4/K3+K5∗C)/K2/(tau∗s+K1)
②求C(s)。
clear;syms s C R X1 X2 X3 X4 X5 K1 K2 K3 K4 K5 T tau;
[C]=solve( R=C+(s∗(T∗s+1)∗C/K4/K3+K5∗C)/K2/(tau∗s+K1)
R=C+(s∗(T∗s+1)∗C/K4/K3+K5∗C)/K2/(tau∗s+K1) ,
, C
C ),
),
程序运行结果
C=R/(K4∗K3∗K2∗tau∗s+K4∗K3∗K2∗K1+T∗s^2+s+K5∗K4∗K3)∗K4∗K3∗K2∗(tau∗s+
K1)
即传递函数为

用Simulink建立的系统结构图模型是第4种系统数学模型,在以下系统模型的化简里,显示了其独特的作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。