



这里详细介绍直流电机(DC Machine)与异步电机(Asynchronous Machine)的连接与参数设置的方法。这两模块元件提取的路径是Simulink\SimPoweSystem\Machines。
1.直流电机(DC Machine)
1)直流电机模型图标。直流电机模型图标如图3-12所示。
2)直流电机模型接线端子。直流电机模型接线端子功能如下:直流电机电枢回路接线端(A+)(A-);电机励磁电路接线端(F+)(F-);电机的负载转矩信号输入端(TL);电机运转状态的信号检测端(m):检测转速ω(rad/s)、电枢电流Ia(A)、励磁电流If(A)、电磁转矩Te(N·m)等。
3)直流电机参数设置。在模型结构图中,双击图3-12所示图标时,则弹出直流电机参数设置对话框,如图3-13所示。多项参数说明如下。
“Preset model”:设置美国制式5~250HP直流电机型号规格,即选择其功率、电枢电压、速度、励磁电压等或不设置。
“Mechanical input”:设置电机输入转矩TL或速度ω。
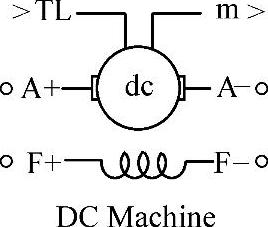
图3-12 直流电机模型图标
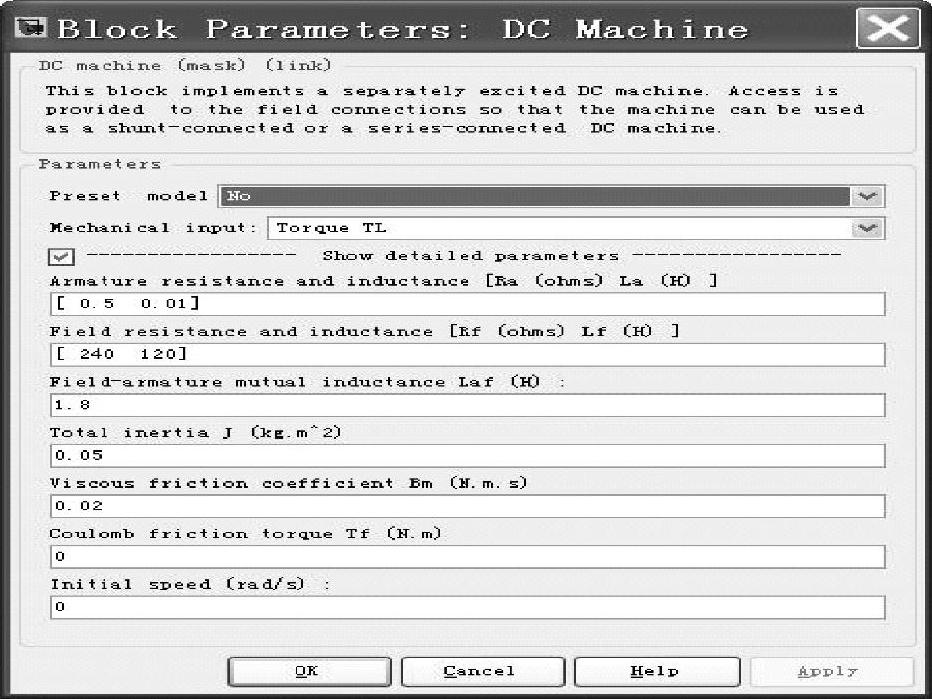
图3-13 直流电机参数设置对话框
“Show detailed parameters”:当勾选此项时即显示以下参数,否则不显示。参数如下:
“Armature resistance and inductance[Ra(ohms)La(H)]”:电枢电阻Ra(Ω)与电感La(H)。
“Field resistance and inductance[Rf(ohms)Lf(H)]”:励磁回路电阻Rf(Ω)与感Lf(H)。
“Field-armature mutual inductance Laf(H)”:电枢与励磁回路互感Laf(H)。
“Total inertia J(kg.m^2)”:电机转动惯量(kg·m2)。
“Viscous friction coefficient Bm(N.m.s)”:黏滞摩擦系数(N·m·s)。
“Coulomb friction torque Tf(N.m)”:静摩擦转矩(N·m)。
还有参数初始角速度“Initial speed(rad/s)”。
2.异步电机(Asynchronous Machine)
1)异步电机模型图标。异步电机模型图标如图3-14所示。图3-14a为标幺制单位(pu)的异步电机,图3-14b为标准单位(SI)的异步电机,后者是普遍使用的。
2)异步电机模型接线端子。异步电机模型接线端子功能如下。A、B、C:交流电机的定子电压接线端;a、b、c:绕线转子交流电机的转子输出端,一般短接。若设置为笼型电机,则无此输出端子。Tm:电机转子的机械负载输入端。m:电动机运转状态的信号检测端,参见后续介绍的异步电机测试信号分配器(Machine Measure-ment Demux)。
3)异步电机参数设置。异步电机参数设置对话框如图3-15所示。多项参数说明如下。
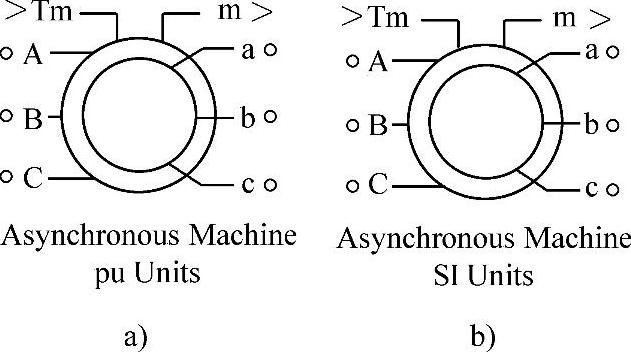
图3-14 异步电机模型图标
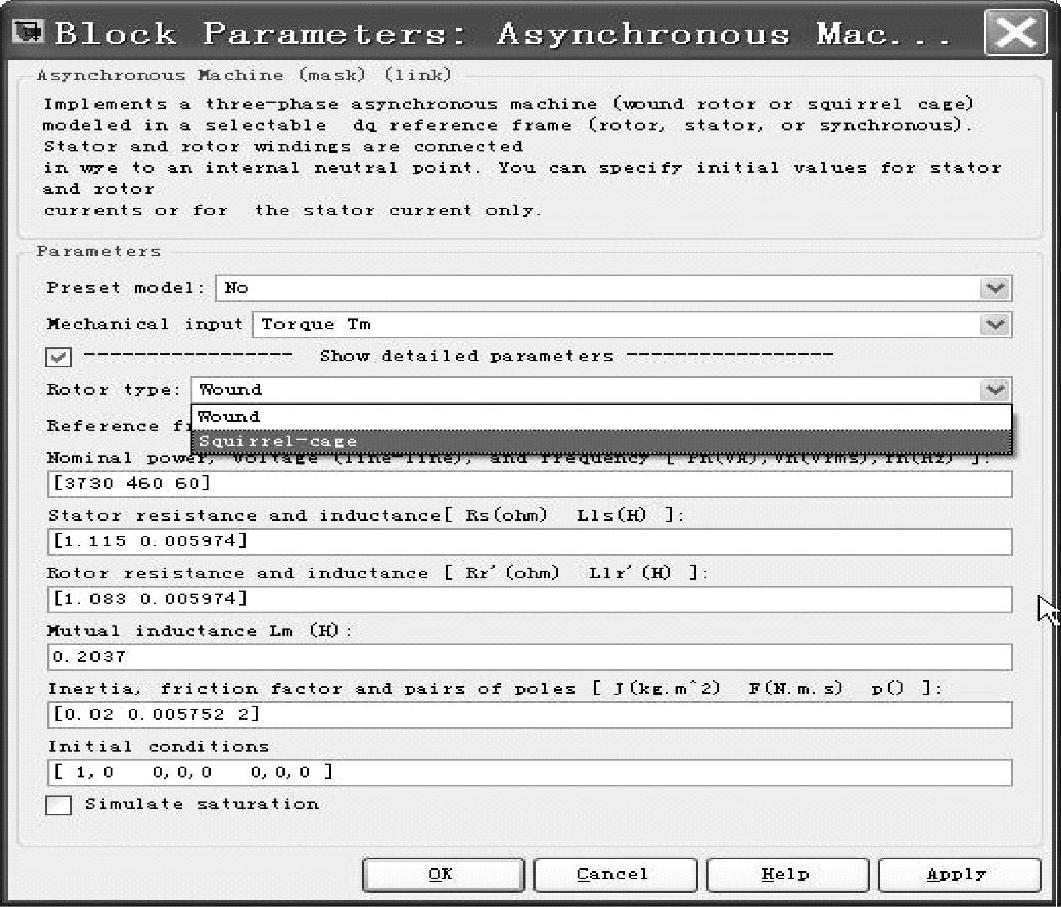
图3-15 异步电机参数设置对话框
“Preset model”:设置美国制式5~215HP异步电机型号规格,即选择其功率、定子电压、速度、频率等或不设置。
“Mechanical input”:选择电机输入转矩Tm或速度ω。
“Show detailed parameters”:当勾选此项时即显示以下详细参数,否则不显示。参数为:(https://www.xing528.com)
“Rotor type”:选择电机转子类型:Wound(绕线转子)或Squirrel-cage(笼型)。
“Reference frame”:选择参考坐标系,有Rotor(转子坐标系)、Stationary(静止坐标系)或Synchronous(同步旋转坐标系)。
“Nominal power,voltage(line-line),and frequency[Pn(VA),Vn(Vrms),fn(Hz)]”:额定功率(VA),线电压有效值(V),频率(Hz)。
“Stator resistance and inductance[Rs(ohm)L1s(H)]”:定子电阻Rs(Ω)和漏感L1s(H)。
“Rotor resistance and inductance[Rr (ohm)L1r
(ohm)L1r (H)]”:转子电阻Rr′(Ω)和漏感L1r′(H)。
(H)]”:转子电阻Rr′(Ω)和漏感L1r′(H)。
“Mutual inductance Lm(H)”:互感Lm(H)。
“Inertia,friction factor and pairs of poles[J(kg.m^2),F(N.m.s),p]”:转动惯量J(kg·m2),摩擦系数F(N·m·s)与极对数p。
“Initial conditions”:初始条件有初始转差s,初始点角度phas,phbs,phcs(deg)与定子电流isa、isb、isc(A)。
还可勾选仿真饱和值“Simulate saturation”。
4)电机测试信号分配器(Machine Measurement Demux)。电机实体模型的运转信息一般不能直接得到,在仿真过程中需与模块Machine Measurement Demux(电机测试信号分配器)配合使用而得到。电机测试信号分配器的提取路径为Simulink\SimPoweSystem\Ma-chines。
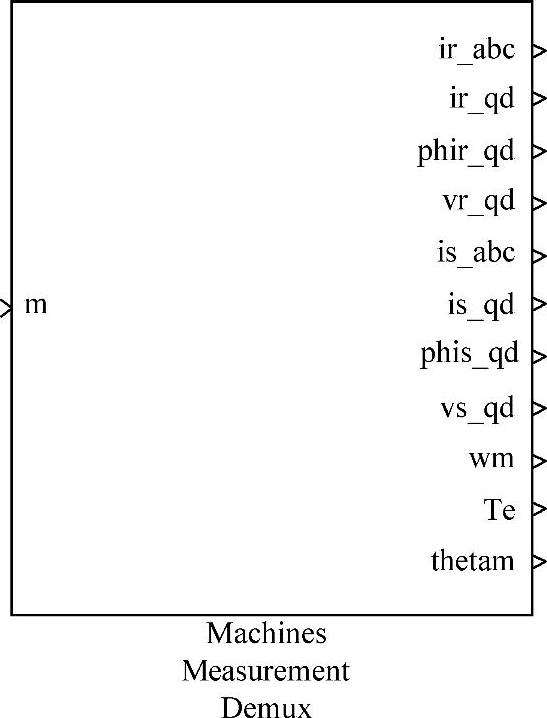
图3-16 电机测试信号分配器图标
电机测试信号分配器的图标如图3-16所示。它有一个输入端(m),与电机的信号检测端(m)相连接,最多可有21路的输出信号与相应的仪表模块相连接。
在模型结构图中,当双击图3-14所示图标时,则弹出电机测试信号分配器输出设置对话框,如图3-17所示。多项参数说明如下。
“Machine type”:选择电机类型,即Synchro-nous(同步电机)、Simplified Synchronous(简化同步电机)、Asynchronous(异步电机)、Pemanent Magnet Synchronous(永磁同步电机)。显然,当选择不同的电机时会有不同的输出信号设置。以下是电机测试信号分配器的输出信号构成。
“Rotor currents”:转子电流[ira、irb、irc]。
“Rotor currents”:同步坐标系d-q下的q轴下的转子电流与d轴下的转子电流[ir_q、ir_d]。
“Rotor fluxes”:同步坐标系d-q下的q轴下的转子磁通与d轴下的转子磁通[phir_q、phir_d]。
“Rotor voltages”:同步坐标系d-q下的q轴下的转子电压与d轴下的转子电压[vr_q、vr_d]。
“Stator currents”:定子电流[isa、isb、isc]。
“Stator currents”:同步坐标系d-q下的q轴下的定子电流与d轴下的定子电流[is_q、is_d]。
“Stator fluxes”:同步坐标系d-q下的q轴下的定子磁通与d轴下的定子磁通[phis_q、phis_d]。
“Stator voltages”:同步坐标系d-q下的q轴下的定子电压与d轴下的定子电压[vs_q、vs_d]。
“Rotor speed”:电机的转速ωm。
“Electromagnetic torque”:电机的电磁转矩Te。
“Rotor angle”:电机的转子角位移θm(rad)。
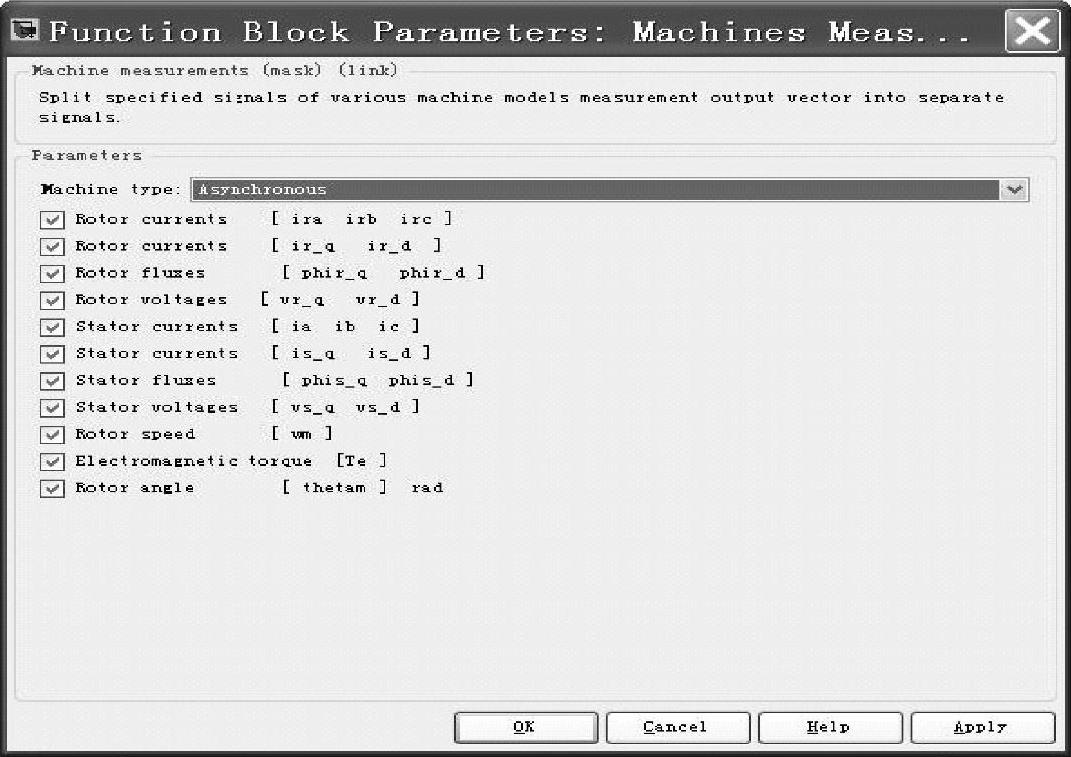
图3-17 电机测试信号分配器的输出信号构成
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。