



人类利用视觉、听觉、嗅觉、味觉和触觉等感觉器官,从外界获得信息,再通过大脑对信息进行处理,然后通过执行器输出到外界。在信息处理中,脑神经系统起着重要作用,它是由100亿个到1000亿个神经元形成的神经网络。虽然各神经元的处理速度不快,但是通过大量的神经元进行并行处理,就能够完成人类社会中的复杂判断和行动。

图16-18 神经元结构示意图
生物神经元的结构如图16-18所示,神经元由分离的多个输入纤维和一条输出纤维构成,通过成千上万的树突接收来自其他神经元的信息并叠加一起,如果叠加的信号足够强大,那么神经元就被激励,从轴突产生一个输出信号,而轴突与其他众多神经元的树突相连。来自树突的信号需要经过一个突触——树突上的一个极小间隙,里面充满一种称为神经传递素的流体,具有加速或阻碍电荷流动的能力,而神经传递素的状态由大脑的记忆和学习决定。
人工神经网络(Artificial Neural Network,ANN)是模仿人类思考过程的一类最普通的人工智能,是通过电子电路或计算机程序等有限方法去模拟人脑的生物神经系统。ANN的组成单元是人工神经元,其结构如图16-19所示,它类似于一个加法器。其中X是一系列的输入变量,每一个变量经过一个增益(即权重W),它可正可负,表明了该变量的连接强度,相当于图16-18中的突触。累加器将经过权重作用后的信号进行累加,并加上偏置信号b,再经过一个激励函数F后产生神经元的输出信号。
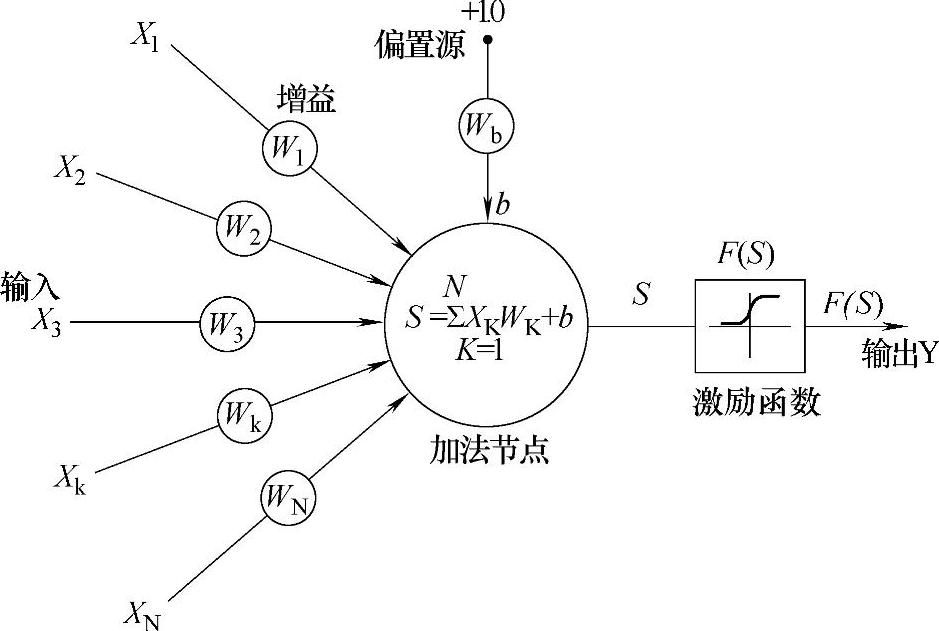
图16-19 人工神经元结构
神经元的输出可以表示为

图16-19中的神经元激励函数(也称为传递函数)一般具有非线性,其值一般在0~1或-1~1之间,图16-20给出了常用的几种激励函数F(S)。其中图16-20a为施加了饱和限幅的线性函数;F(S)可以是阶跃或阈值类,如图16-20b、图16-20c所示;图16-20d为常用的S型函数,图16-20e为双曲线正切函数。
人工神经网络是人工神经元之间互连形成的网络,其目的是通过模仿人类大脑的功能来解决科学、工程中的现实问题。总的说来,有两大类神经网络:前馈网络——如感知器(PERCEPTRON)、ADA-LINE、反向传播网络(BACK PROPAGATION NETWORK)、模糊神经网络等;反馈网络(递归网络)——如HOPFIELD神经网络等。

图16-20 各种人工神经元激励函数(https://www.xing528.com)
图16-21给出了一个三层神经网络,它包含输入层、隐含层和输出层,根据每层神经元个数可以将其定义为4-3-4网络。输入层和输出层神经元个数分别与系统的输入和输出变量个数相等。隐含层的作用在于连接输入层和输出层。输入层的神经元具有单位斜率的线性激励函数,且一般具有一个量化因子将其进行归一化处理。神经网络可以有多层隐含层,隐含层的层数及每层神经元数量由待解决问题的复杂程度决定。现在已经证明一个三层的ANN可以将输入的任意连续函数转换为任意的期望函数来输出,因此,常称为万能函数逼近器。
神经网络在自动控制系统中所起的作用可以分为四类:1)在控制结构中充当对象的模型;2)在控制结构中充当非线性控制器;3)优化计算;4)与其他智能控制如专家系统、模糊控制相结合并为其提供非参数化对象模型、推理模型等。设计神经网络的关键是具体结构的设计和网络权重的学习优化。

图16-21 三层神经网络结构图
在电力电子与电力传动领域,神经网络已经用于各种控制、辨识和估计,例如表格查询、变流器的PWM实现、神经网络自适应PI控制器、无延时滤波、模型参考自适应控制(MRAC)、反馈信号估计、在线故障诊断、快速傅里叶变换(FFT)等。
本书在讲解交流电动机磁场定向矢量控制技术时指出:电流的闭环控制是矢量控制技术实施的一个关键环节,下面举例说明基于神经网络的瞬时电流控制PWM的实现。
图16-22中Δia、Δib、Δic分别是三相定子电流的给定值与其反馈值之间的误差值,它们经过比例系数K后作为ANN的输入信号,ANN的输出信号经过硬限幅器(将变量转换为0、1中一个)和采样保持电路(S&H)后得到的逻辑电平信号作为逆变器开关信号。经过学习训练后,ANN可以实现表16-3的功能(δ为电流滞环控制的滞环宽度)。

图16-22 瞬时电流调节器的神经网络实现
表16-3 神经网络输入、输出训练数据矢量

对于三相无中线连接的负载,不可能出现上表中的1和8状态。为此,采用图16-22中SHa、SHb、SHc对采样保持后的信号进行激励,注意到图中3个激励信号的相位差。经过该处理后,逆变器就可以出现所有的8种开关状态,其中零电压矢量的作用可以减少逆变器的输出谐波分量。采用图16-22所示的瞬时电流控制PWM技术,逆变器的开关频率不会随电源电压、电动机参数和反电动势变化。开关频率的恒定减轻了逆变器的设计任务。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。