



下面基于MATLAB对PMSM的MRAS无位置传感器控制系统进行仿真分析,仿真用电动机参数见表15-1。
表15-1 仿真用电动机参数

仿真程序界面如图15-2所示。
调速系统的给定转速为1000r/min,负载转矩在0.2s时从1Nm阶跃变化为4Nm。图15-3给出了转速PI子系统的内部结构,图15-4给出了ASR封装后的参数设置对话框。两个电流调节器的比例系数均为10,积分系数均为2000。
图15-5给出了利用MRAS的算法进行电动机速度观测的单元结构。
图15-6给出了电动机的转矩仿真波形图。可以看出调速系统有3个阶段:0~0.16s内电动机加速起动,电动机输出转矩最大;0.16~0.2s内电动机进入稳态,此时电磁转矩稳定在负载值;0.2~0.4s内由于负载突加,电动机输出转矩迅速调整,转速波形较小,电动机重新进入稳态。图15-7给出了转速仿真波形图,图中有实际转速与观测转速,由于两者误差较小,波形相差不大。
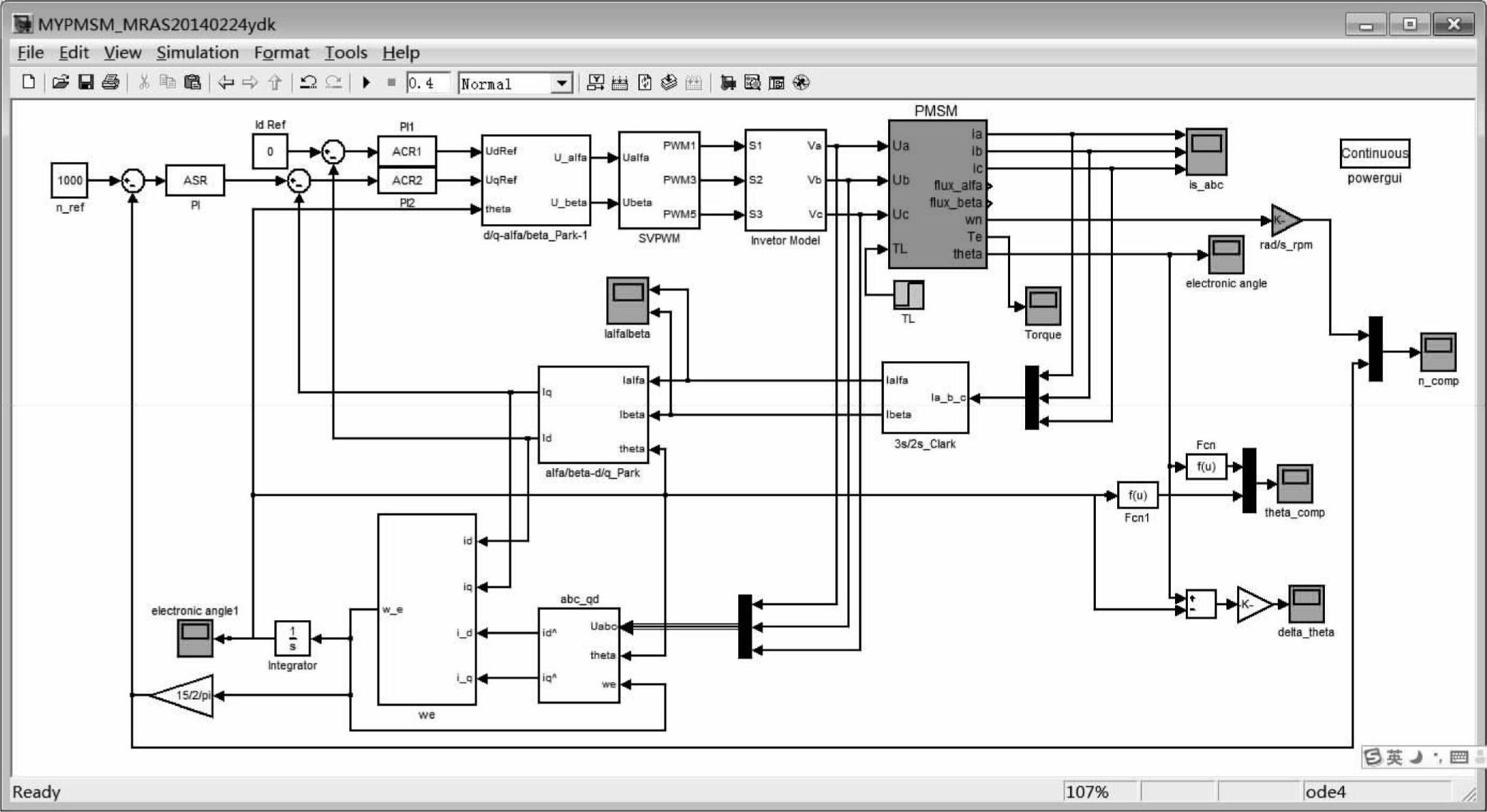
图15-2 MATLAB仿真程序界面
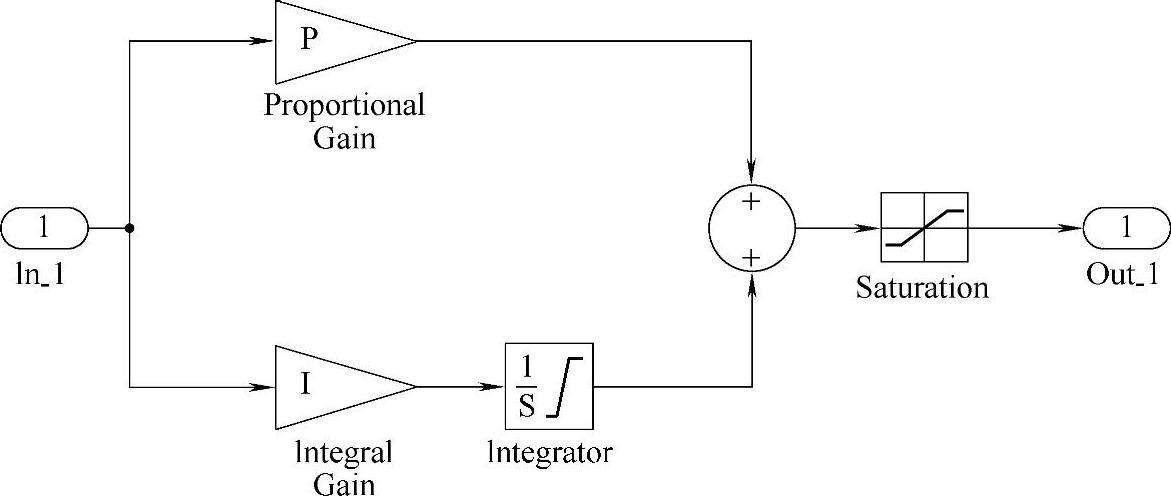
图15-3 转速PI调节器模型
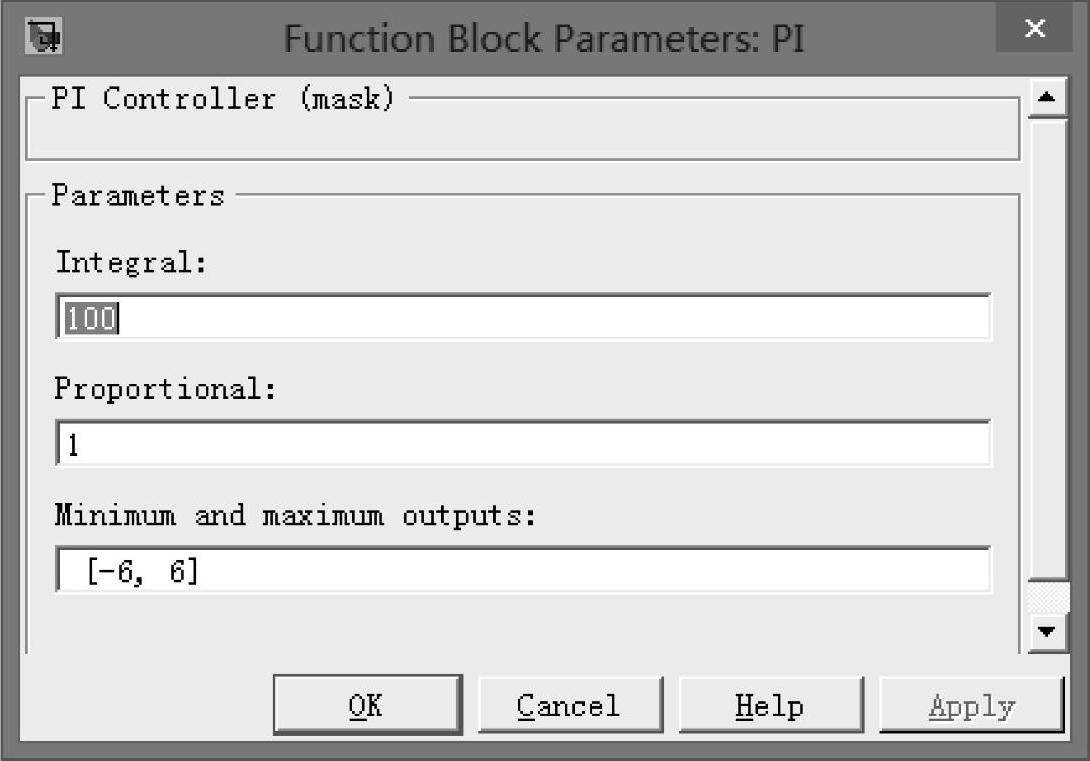
图15-4 ASR封装子系统参数设置对话框
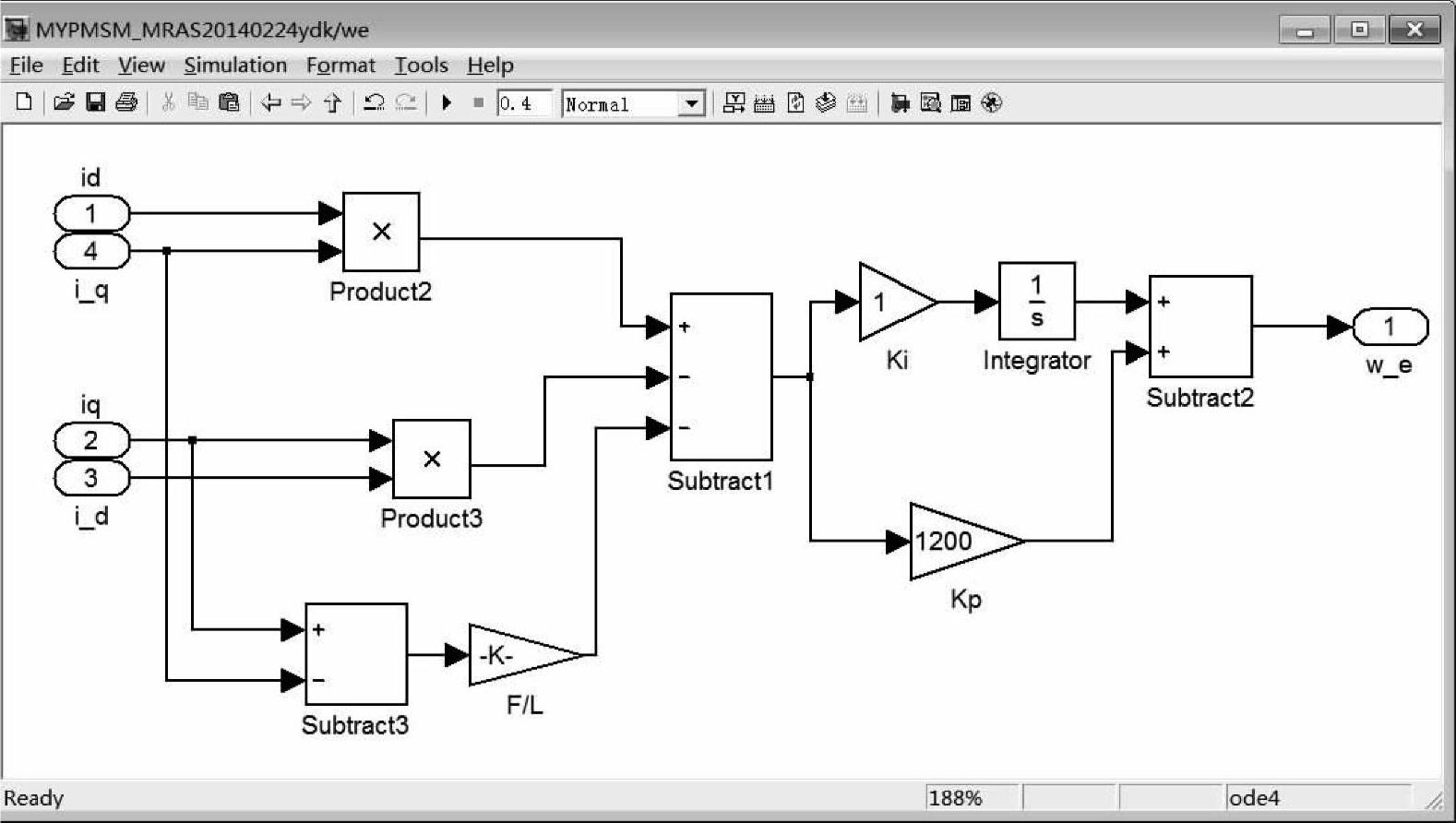
图15-5 电动机转速观测单元(https://www.xing528.com)
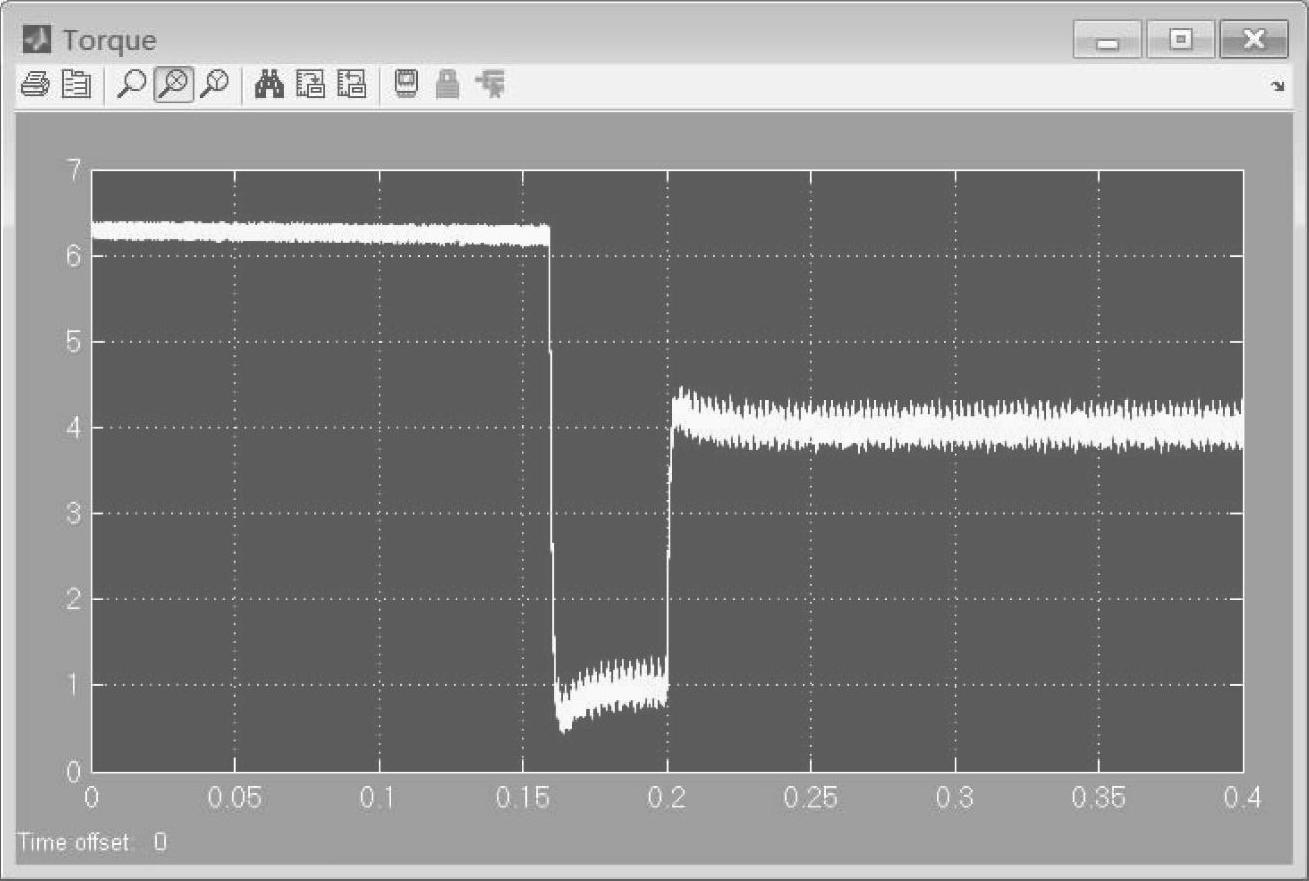
图15-6 电动机转矩波形
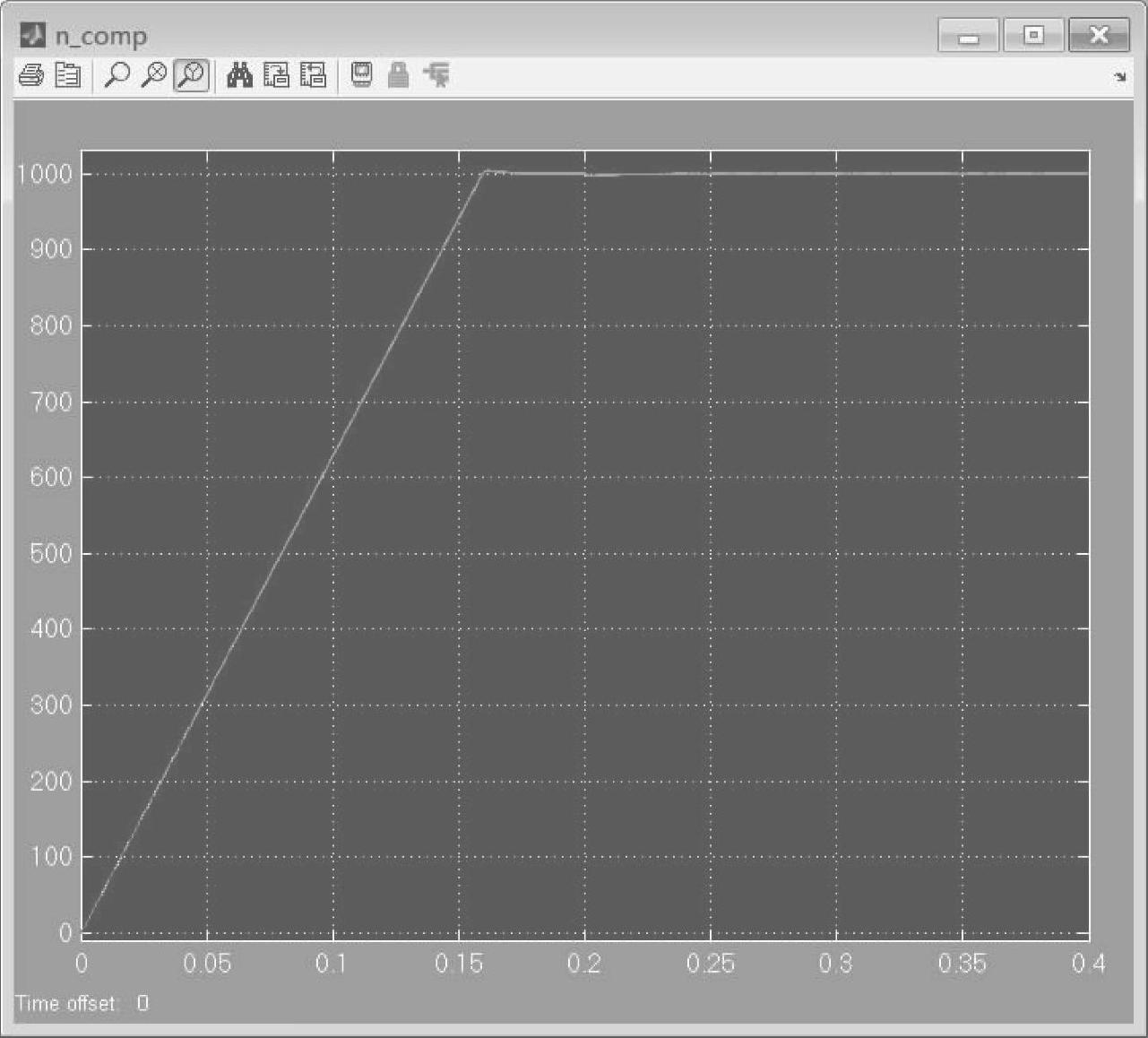
图15-7 电动机转速波形
图15-8给出了电动机实际转子位置与观测位置波形(单位是弧度),两者区别不大。图15-9给出了以角度为单位的两者误差,可以看到两者相差较小。
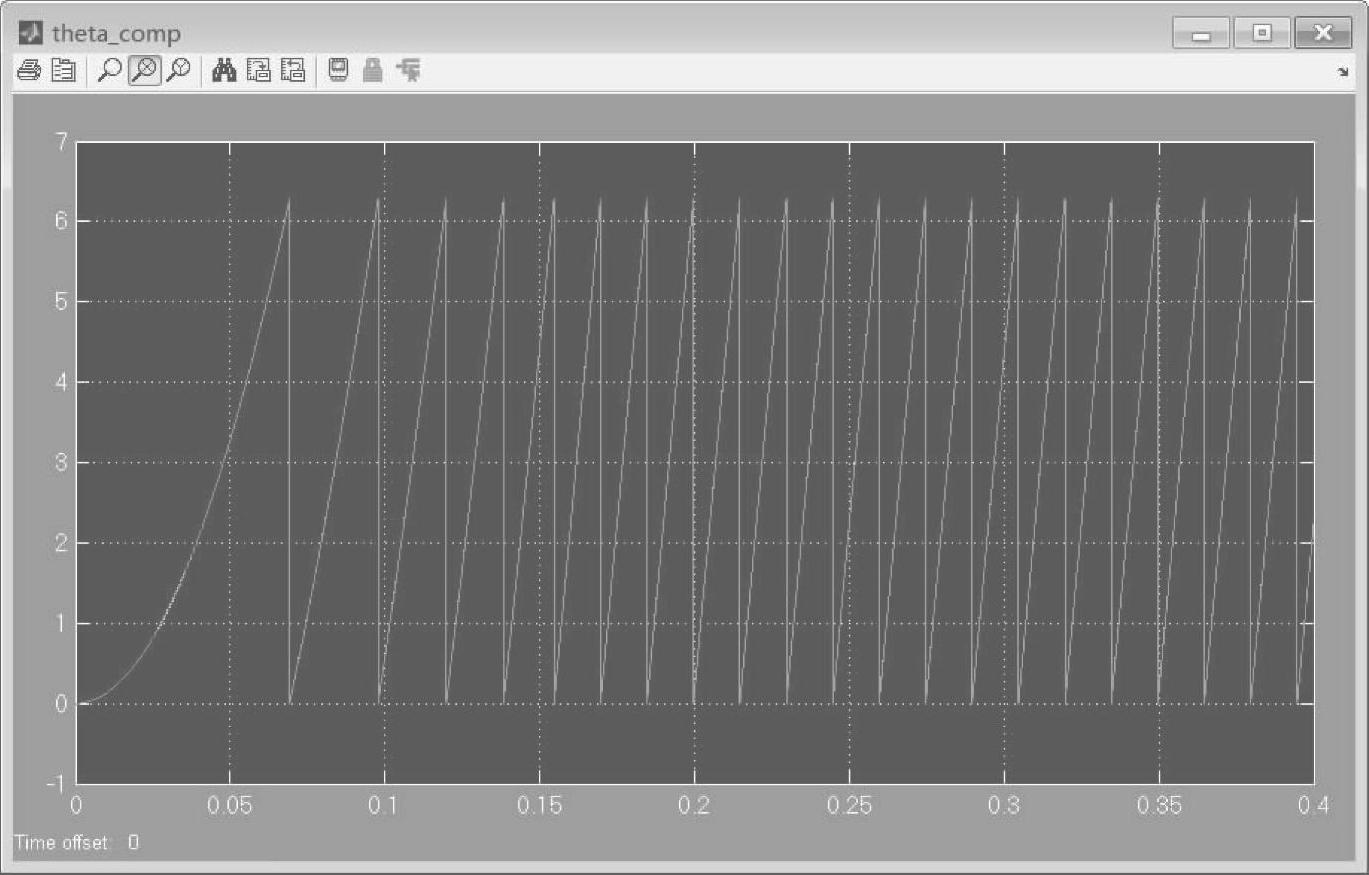
图15-8 电动机转子位置波形
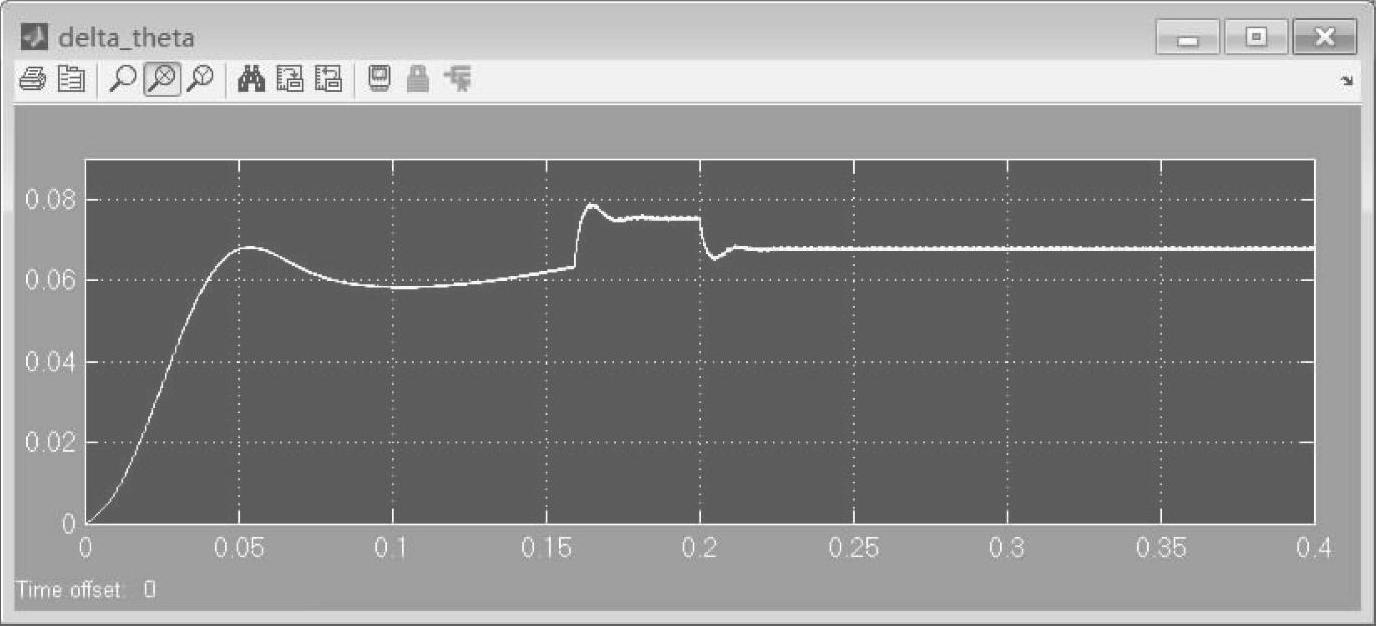
图15-9 电动机转子位置误差波形
图15-10给出了电动机三相定子电流波形与三相绕组的反电动势波形图,图15-11给出了图15-10最后一段时间内的放大波形。从中可以很清楚地看出:电动机的定子电流与反电动势是同相的,这与图15-2中id=0的矢量控制策略是相吻合的。这意味着,电动机的定子电流全部是转矩分量,无励磁分量。
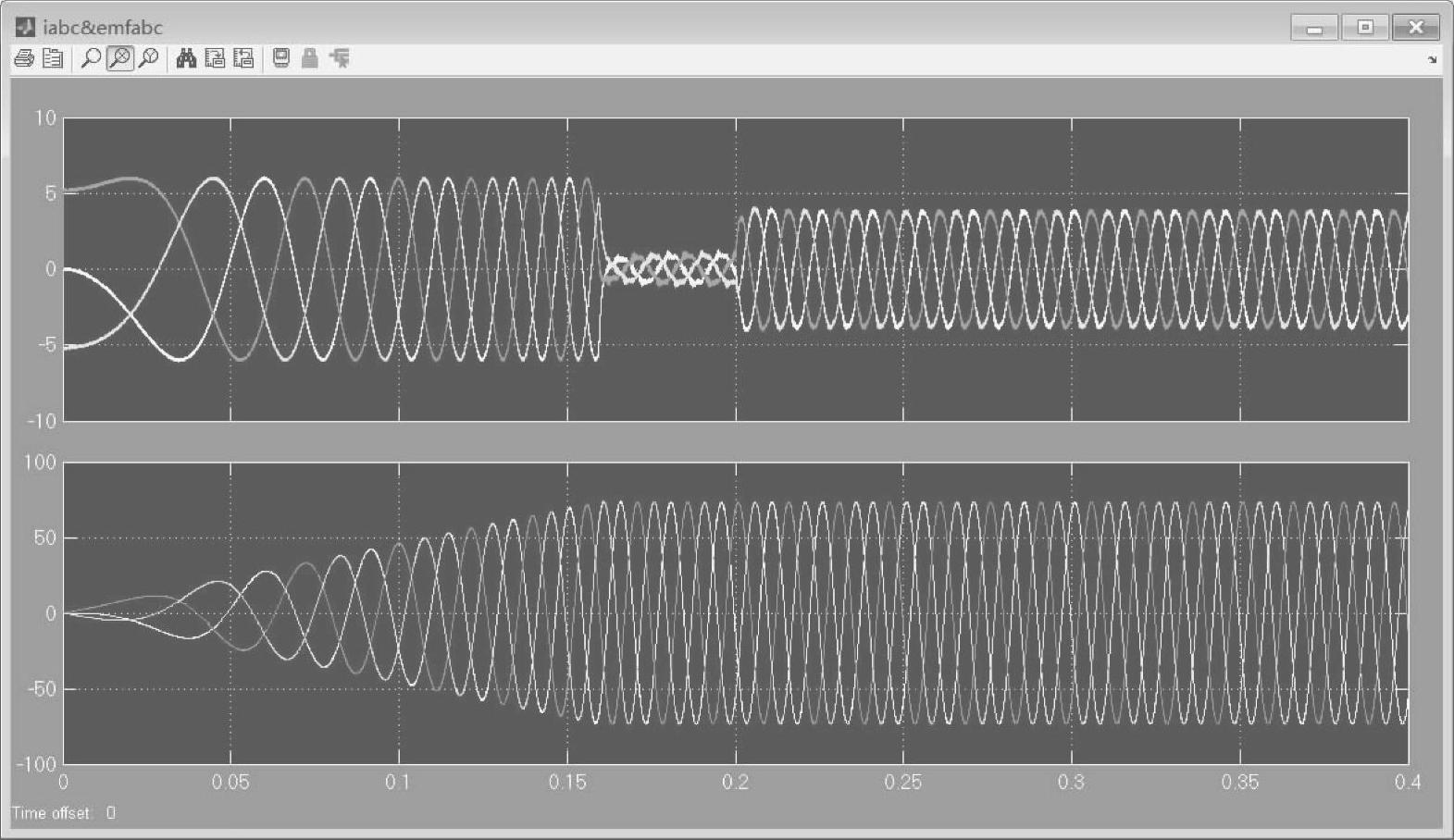
图15-10 电动机三相定子电流与反电动势波形图
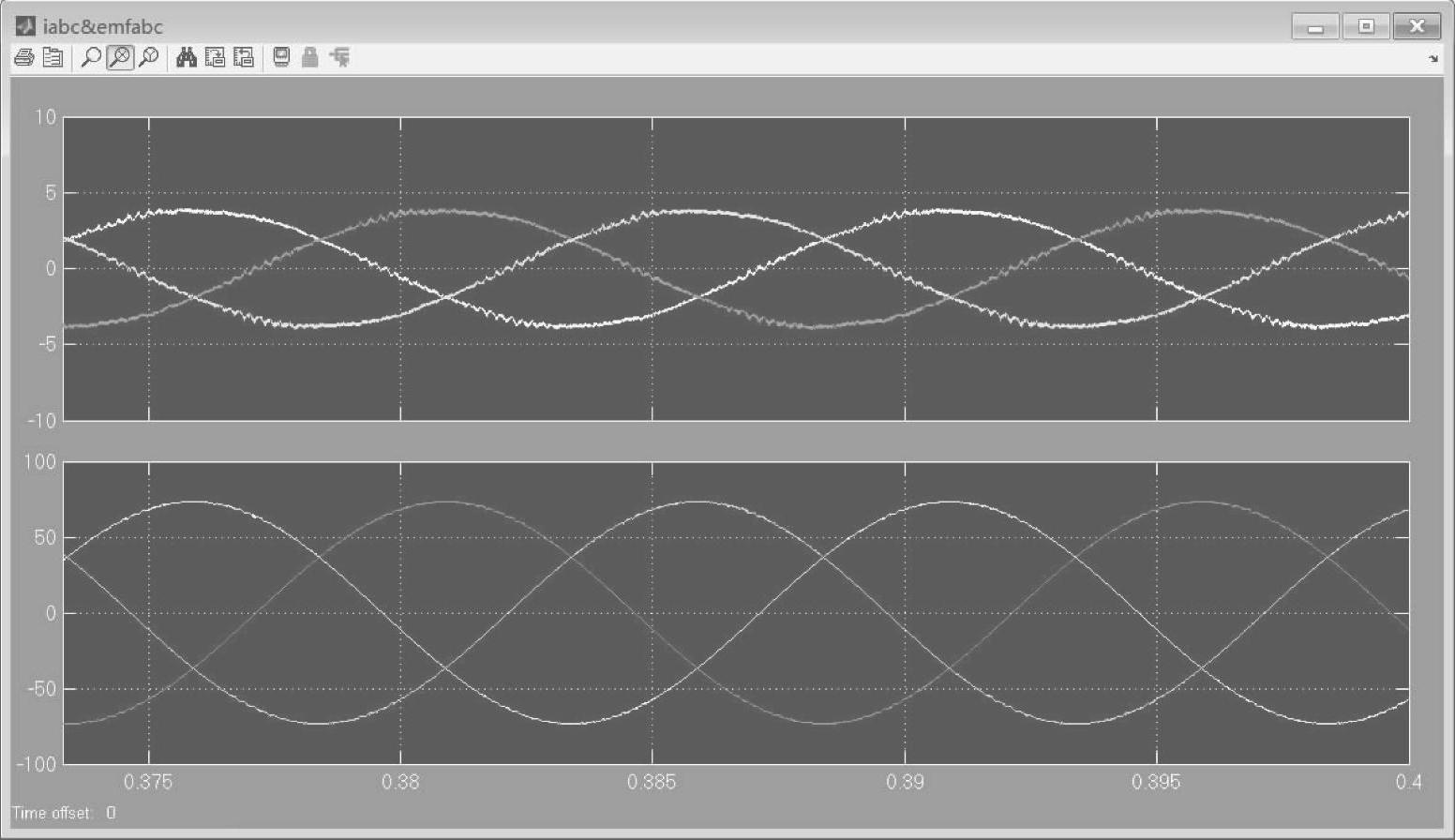
图15-11 电动机三相定子电流与反电动势波形图(放大后)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。