



前面对电动机转矩脉动的分析表明了:当电动机转速较高时,所需的定子频率较大,CDTC方案施加在定子绕组的平均电角频率也较大,所以转矩的脉动较小;当电动机转速较低时,所需定子频率较小,而CDTC方案的定子频率由于在一个闭环控制周期内不能改变,所以产生了较大的转矩脉动,并且会形成一种特有的低频脉动。当电动机转速越低时,上述的低频脉动越明显,这将导致系统运行性能的降低。如果可以利用SVPWM技术将两电平逆变器原有的电压矢量进行幅值上的调制,从而可以减小一个Ts内的定子平均电角速度,就可以改善电动机低速运行的性能。
根据本书前述SVPWM技术的分析部分,对两电平电压型逆变器的基本电压矢量进行拟合可以得到相角任意的、幅值较小的电压空间矢量,采用该技术可以扩充电压矢量表的矢量个数。例如,可以在原有(图13-11a)电压空间矢量中增加6个幅值较小的同方向电压矢量(如图13-11b),也可以在原有6个电压矢量错开30°的位置扩充6个新电压矢量,如图13-11c所示,这样就可以得到图13-11d中共19种不同的电压空间矢量(包括零矢量)。
采用图13-11中小幅值电压矢量去扩充CDTC方案的电压矢量表,并且在较低速度的时候使用,就可以明显改善系统的转矩性能。图13-12给出了采用上述方法后调速系统的仿真结果。图13-12a给出的是CDTC方案的仿真结果;图13-12b采用图13-11b中小幅值电压矢量(幅值为基本电压矢量的1/2)得到的结果;图13-12c给出了采用幅值为原电压矢量1/5的合成矢量后得到的仿真结果。从图13-12中看出,图13-12b比图13-12a的转矩波动有了一定程度地减小,但是由于电动机速度相当低,图13-12b方案中电压矢量幅值仍然比较大,所以相应的转矩波动没有非常明显的改善;而在图13-12c中,由于合成电压空间矢量的幅值仅为原来的1/5,所以稳态时的转矩脉动已经有了较大改善。
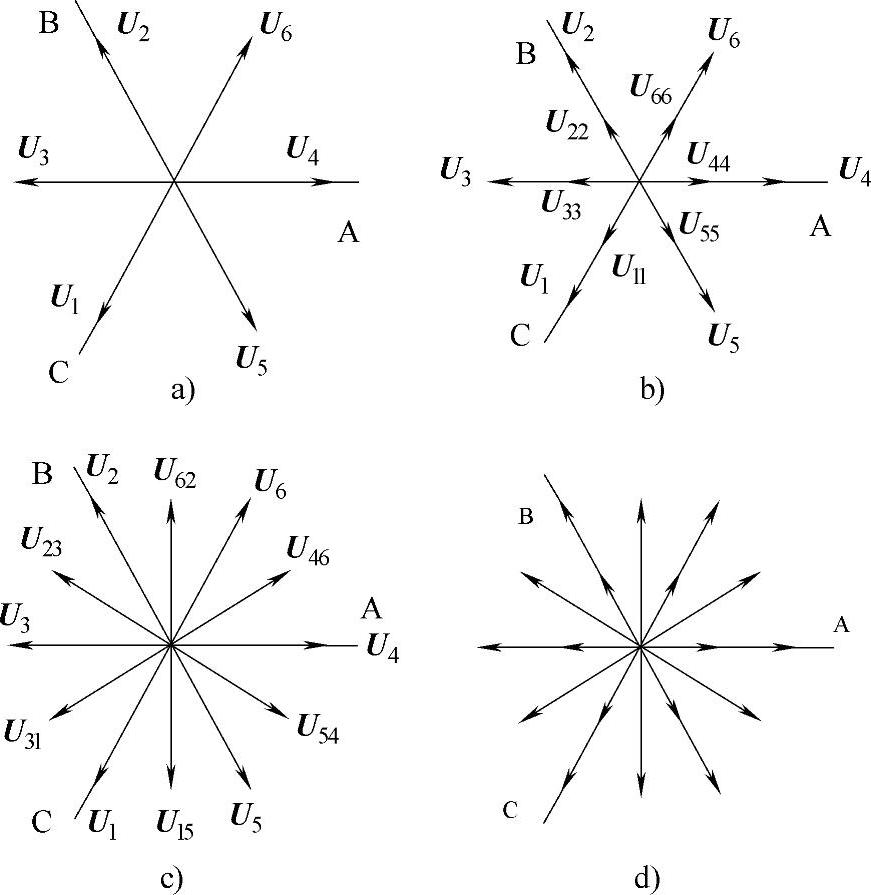
图13-11 电压矢量的扩充图(https://www.xing528.com)
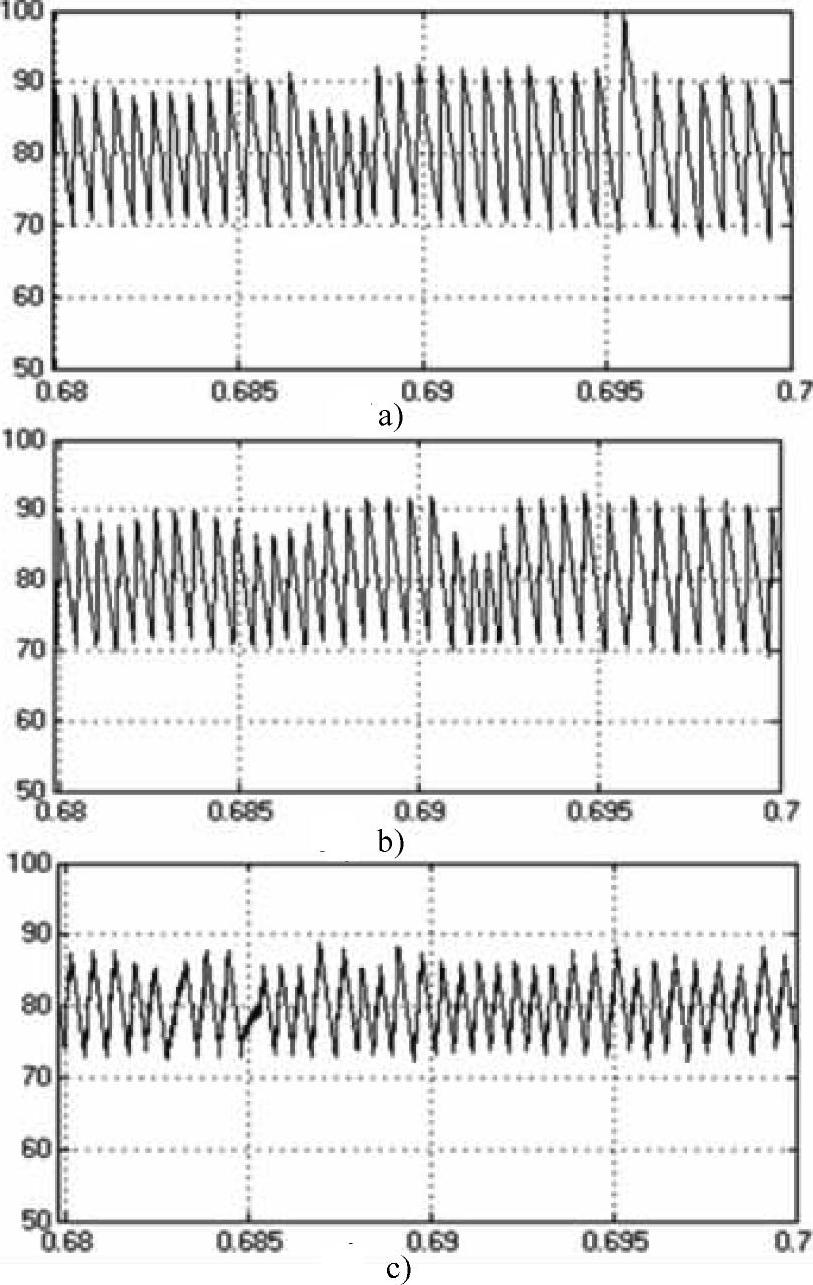
图13-12 不同DTC方案分析结果
即便在转矩的动态过程中,图13-12c中改进后的方案仍然能够产生较快的转矩响应。但是本方案仅能够从扩充后的电压矢量表中挑选一个较合适的电压矢量,尚不能根据电动机实际运行工况来计算出幅值与方向更合适的电压矢量,仍有进一步改进的空间。
图13-11d非常类似于三电平电压型逆变器的电压矢量图。它与三电平逆变器的矢量图存在本质的不同:后者本身固有这19个基本电压矢量(逆变器处于一种导通状态时就可以输出图中的一个电压矢量),而两电平逆变器必须采用PWM技术才可以获得等效的电压矢量(需要在设定的开关周期内切换多个电压矢量)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。