



在交流电动机直接转矩控制技术的发展过程中,出现了两种不同磁链轨迹的直接转矩控制方案,一种是圆形磁链轨迹控制方案(见图13-1),它是日本学者Takahashi提出的;另一种是德国学者Depenbrock提出的六边形磁链轨迹控制方案(见图13-7)。前者的定子磁链轨迹为准圆形,电动机的定子电流呈现出较好的正弦度,但是逆变器的开关频率比较高,适合于中小功率等级的交流调速系统;后者采用六边形磁链轨迹方案,逆变器的开关频率大为降低,非常适合在大功率交流调速场合应用(如城市轨道交通列车交流电气牵引系统),但是定子电流中含有较多的5、7次等谐波。
1.准圆形磁链轨迹的Takahashi方案
图13-1方案是现今研究较多的一种DTC方案,它采用查询电压矢量表的方法同时对定子磁链和电动机转矩进行调节:系统首先应用模型观测器观测出电动机的定子磁链和电磁转矩;然后对其同时进行滞环式砰砰调节,这样就可以得到两个控制目标ΨQ和TQ;再根据定子磁链矢量所处的空间扇区位置(ST),控制器从电压型逆变器的8个电压矢量中直接选择出较为合适的一个,将其转换为逆变器的开关控制信号来控制IGBT器件的开通与关断。
两点式磁链滞环砰砰调节器的工作原理为

该调节器的目的是提供磁链闭环控制的目标ΨQ:当ΔΨ1=Ψ1-Ψ*1≥Δε,那么调节器的输出量ΨQ=1,这意味定子磁链幅值过大,需要选择减小磁链的电压矢量;当ΔΨ1≤-Δε,那么调节器的输出量ΨQ=0,这标志定子磁链的幅值太小,需要选择增加磁链的电压矢量。转矩的砰砰滞环调节器的工作原理与其类似。
磁链与转矩的两个滞环调节器各自提供了一个数字量(即ΨQ与TQ),根据它们的控制需求和定子磁链的扇区位置(S1~S6)就可以选择合适的电压矢量,表13-5给出了一种可行方案。
表13-5 电压矢量选择表
 (https://www.xing528.com)
(https://www.xing528.com)
图13-3是采用上述控制方案下的定子磁链矢量轨迹示意图。其外围的两个圆分别是预先设定的定子磁链空间矢量端点轨迹的波动范围。两圆之间的折线是实施直接转矩控制策略时定子磁链空间矢量端点的实际运动轨迹。右上角的箭头注明了定子磁场的旋转方向。
以扇区S1为例,当定子磁链矢量端点运动到A点时,定子磁链幅值超出了设定的上限,因此根据表13-5选择U2;接下来的定子磁链由A点向B点移动,幅值逐渐减小。而到了B点后,定子磁链幅值超出设定的下限,所以改选电压矢量U6;然后定子磁链就会从B点运动到C点,定子磁链幅值又增加了。这样依次类推,定子磁链就可以沿着A→B→C→D→E→F→G运动,定子磁链的相角就可以不断地增加,转矩不停地增加。在上述过程中,一旦转矩要求减小(TQ=1),那么就选择U0或U7(当然也可以采用别的矢量)来减小定子、转子磁链矢量的夹角进而减小电动机的转矩。
2.六边形磁链轨迹的Depenbrock方案
图13-7为德国学者Depenbrock提出的直接转矩自控制(Direct Self Control,DSC)方案。其工作原理是:按照预先给定的定子磁链幅值指令和相位关系顺次切换六个非零电压矢量,从而实现了预设的六边形定子磁链轨迹控制——这是磁链自控制单元(图13-7虚线框内部分)的功能;同时根据转矩砰砰控制器的输出信号TQ,适时地插入零电压矢量来调节电动机的转矩保持在合适的范围内——这是转矩自控制单元(ESS)的功能。
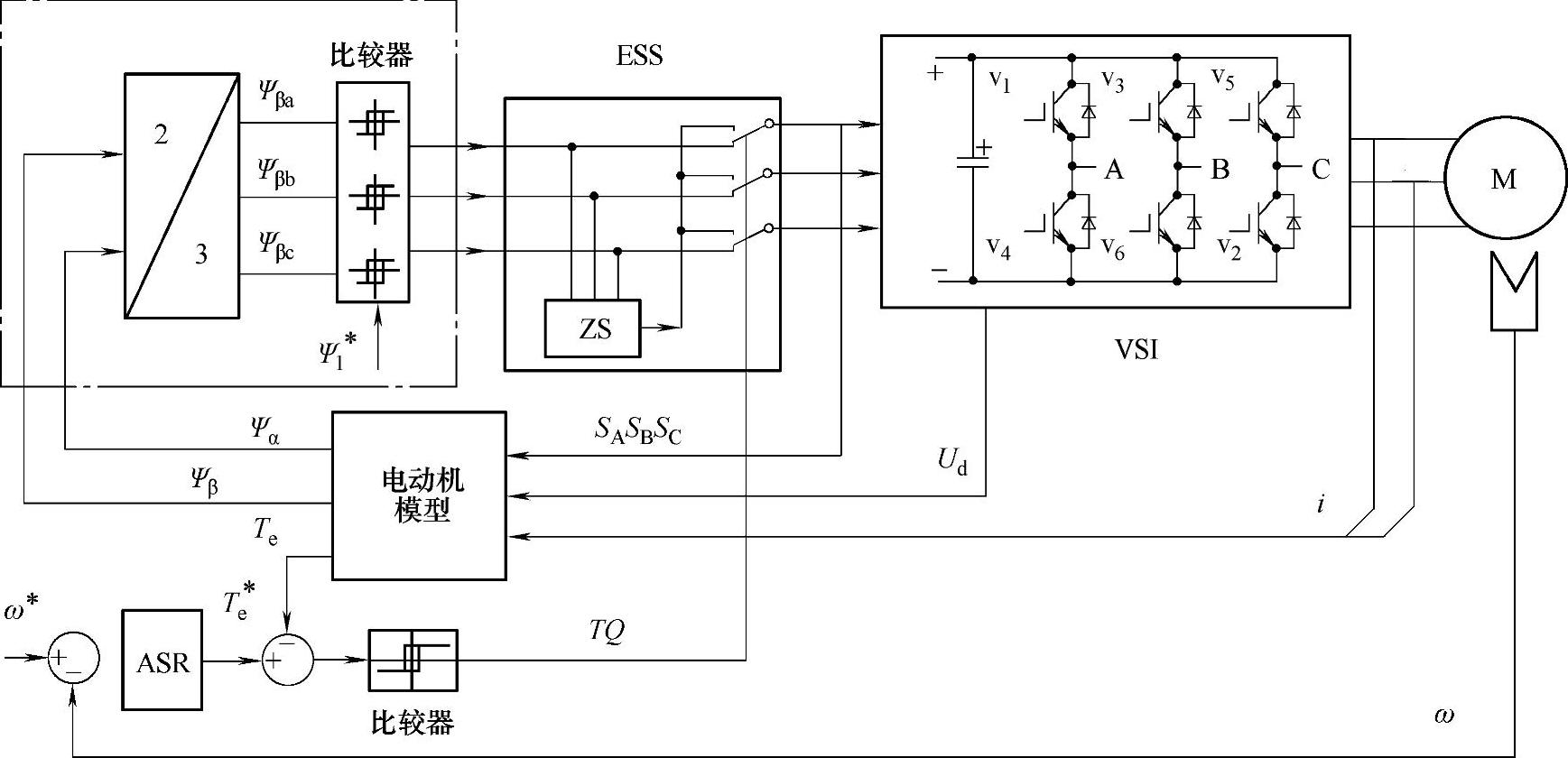
图13-7 Depenbrock提出的直接自控制方案
从上述两种方案中可以看出,虽然它们的定子磁链轨迹不同,但都是根据滞环调节器提供的简单控制目标(被控量是太大还是太小,控制目标是需要增加还是减小被控量)和定子磁链的近似空间位置,就可以选择出合适的定子电压矢量,系统的控制结构较矢量控制系统更为简单。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。