



前面章节中已经分析过PMSM变频调速系统中各单元(包括PMSM电动机建模、VSI逆变器建模、PWM控制技术仿真模型、PI调节器参数设计等)的建模,这里对采用图12-18的基于三相定子电流滞环控制的FOC控制系统进行仿真建模与分析。
MATLAB/SIMULINK仿真程序如图12-25所示。程序运行中使用到4个变量(逆变器直流侧电压ud、电流滤波器时间常数toi、电流滞环宽度delta_i、电动机极对数p)在图12-26中进行了定义,该对话框可以在图12-25的file菜单的model properties中打开。打开图12-26选项卡Callbacks的InitFcn部分,在右侧模型初始化函数(Model initialization function)部分键入图示的变量初始化语句,在mdl文件运行前MATLAB会依据键入的语句自动初始化各变量。
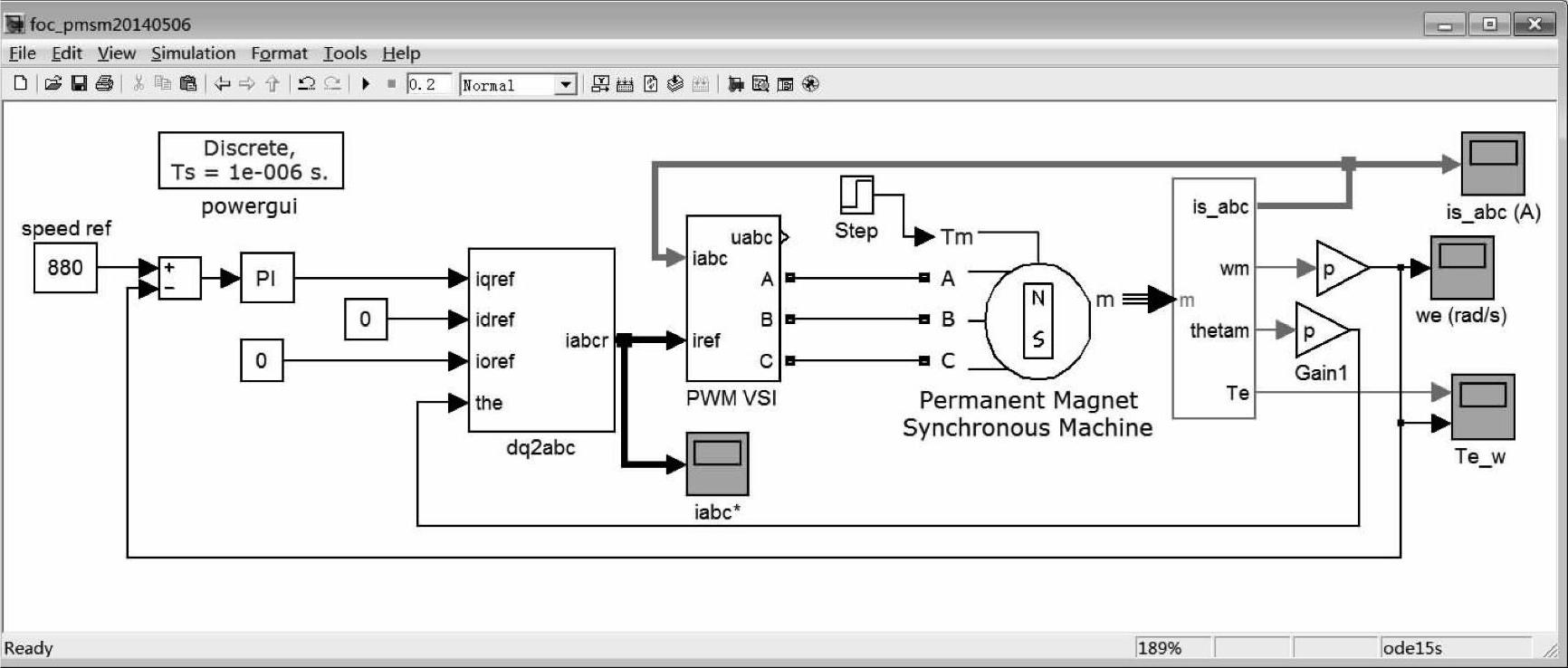
图12-25 三相电流滞环控制的PMSM矢量控制系统仿真程序
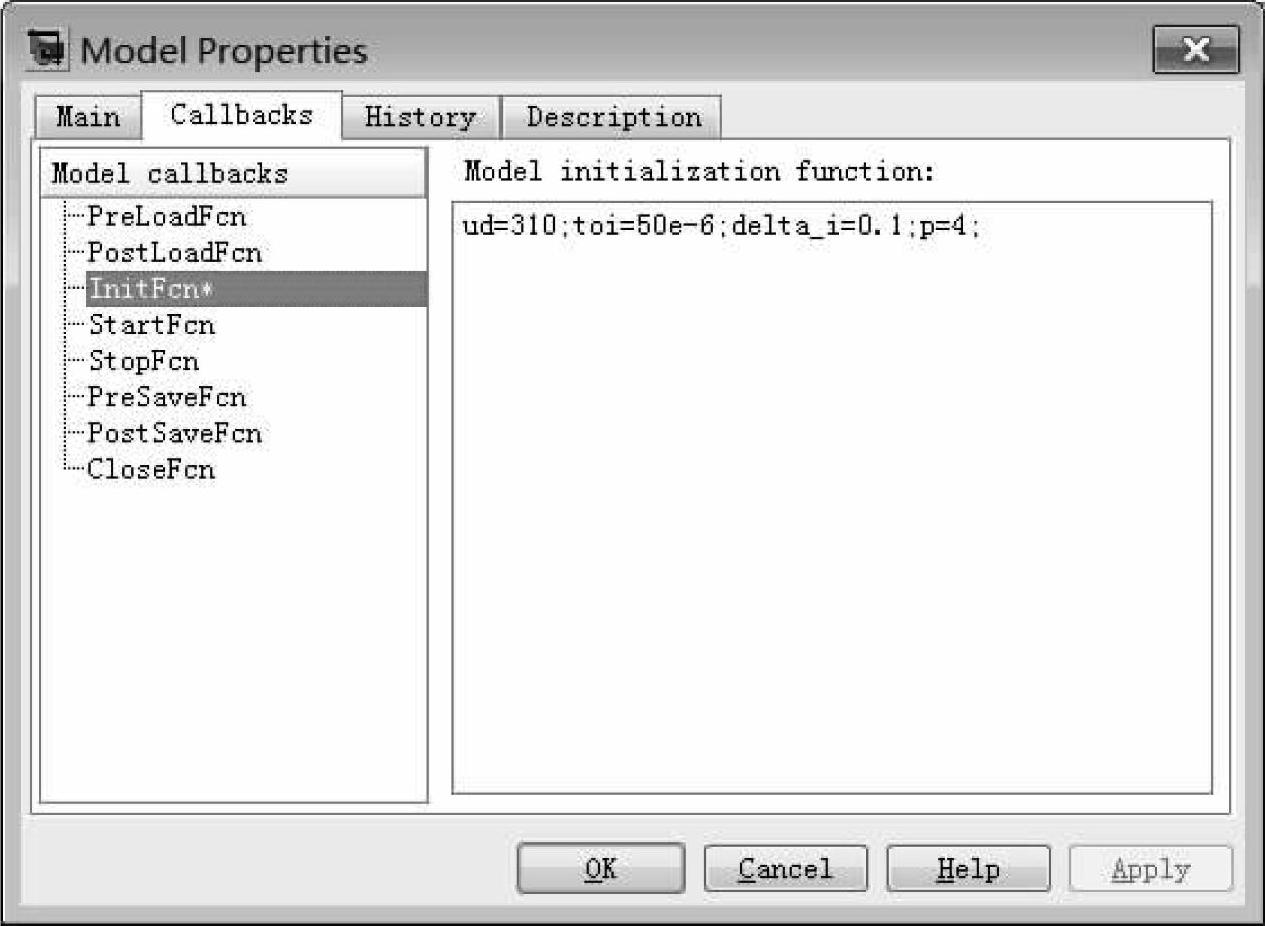
图12-26 常量的初始化设置
图12-25中转速给定模块(Speed Ref)使用SIMULINK中的常数(Constant)模块,单位为(rad/s),该指令值是电气角速度指令。从电动机测量模块得到的机械角速度需要通过系数为p的增益模块变为电角速度。这里给定了880rad/s的电角速度指令,对应了电动机的定子频率为880/2/pi≈140Hz。
PMSM电动机参数设置对话框如图12-27所示,图12-27a中选择电动机为正弦(Sinu-soidal)反电动势类型(Back EMF waveform)和机械端输入(Mechanical input)为转矩变量,在图12-27b中设置定子电阻(Stator phase resistance Rs)、dq轴电感(Inductance)、定子绕组的永磁磁链(Flux linkage established by magnets)、电动机的转动惯量(Inertia)、电动机的转矩摩擦系数(friction factor)、电动机的极对数(pole pairs)、电动机的初始转速、位置、电流(Initial conditions)。需要注意的是,MATLAB中对转子位置的定义和前面的分析略有不同,仿真中的零位置实际上是滞后本书定义的零位置90°电角度(如本书第4章所述)。因此,如果需要按照前面章节内容对PMSM进行dq轴变量分析,需要将仿真中的电动机转子位置电角度减去90°。
图12-25中电动机测量单元的参数设置对话框如图12-28所示,这里选择了定子三相电流、转子机械角速度(wm,单位rad/s)、转子机械位置角(thetam,单位rad)、电磁转矩(Te,单位Nm)。
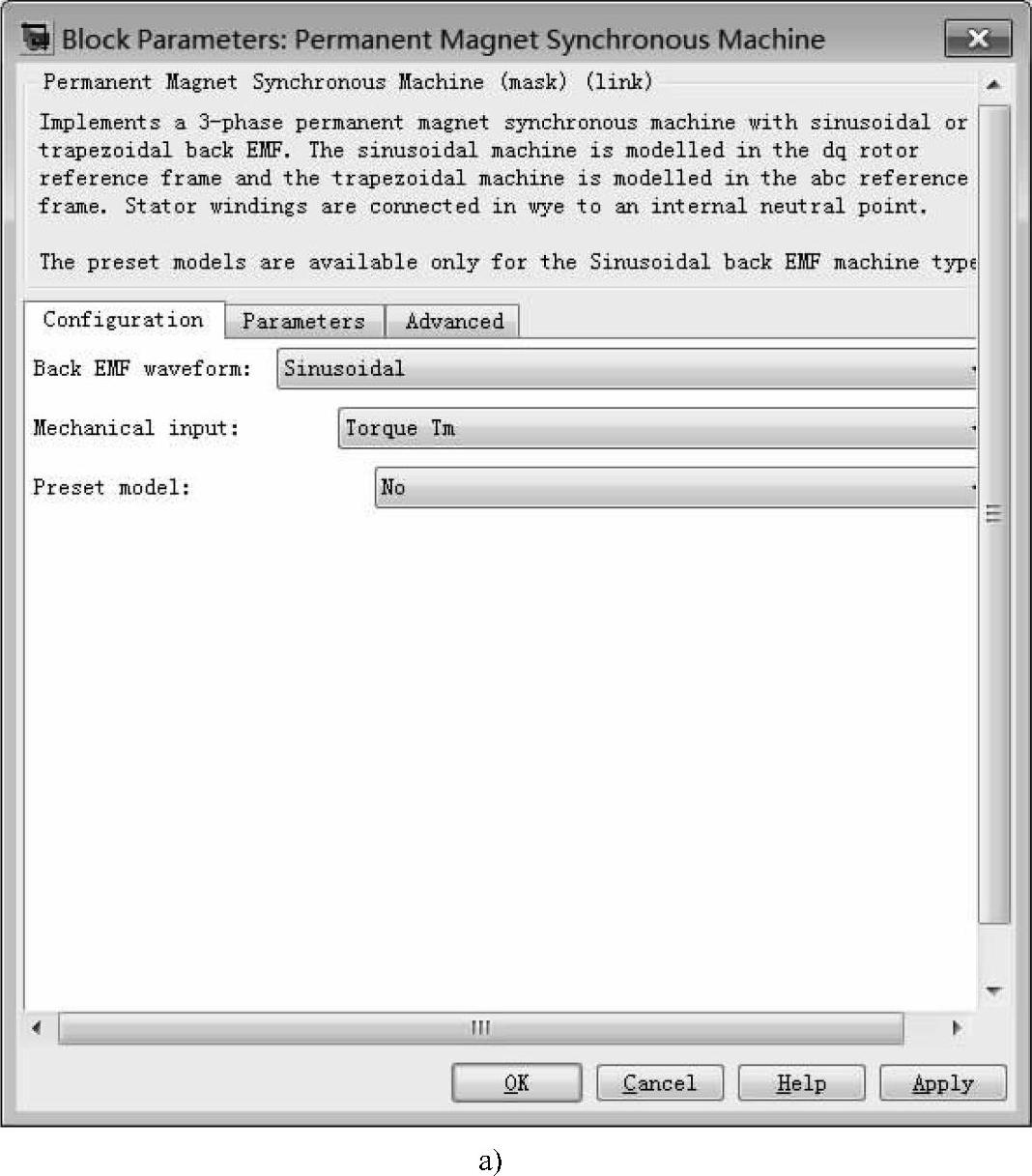
图12-27 电动机参数设置对话框
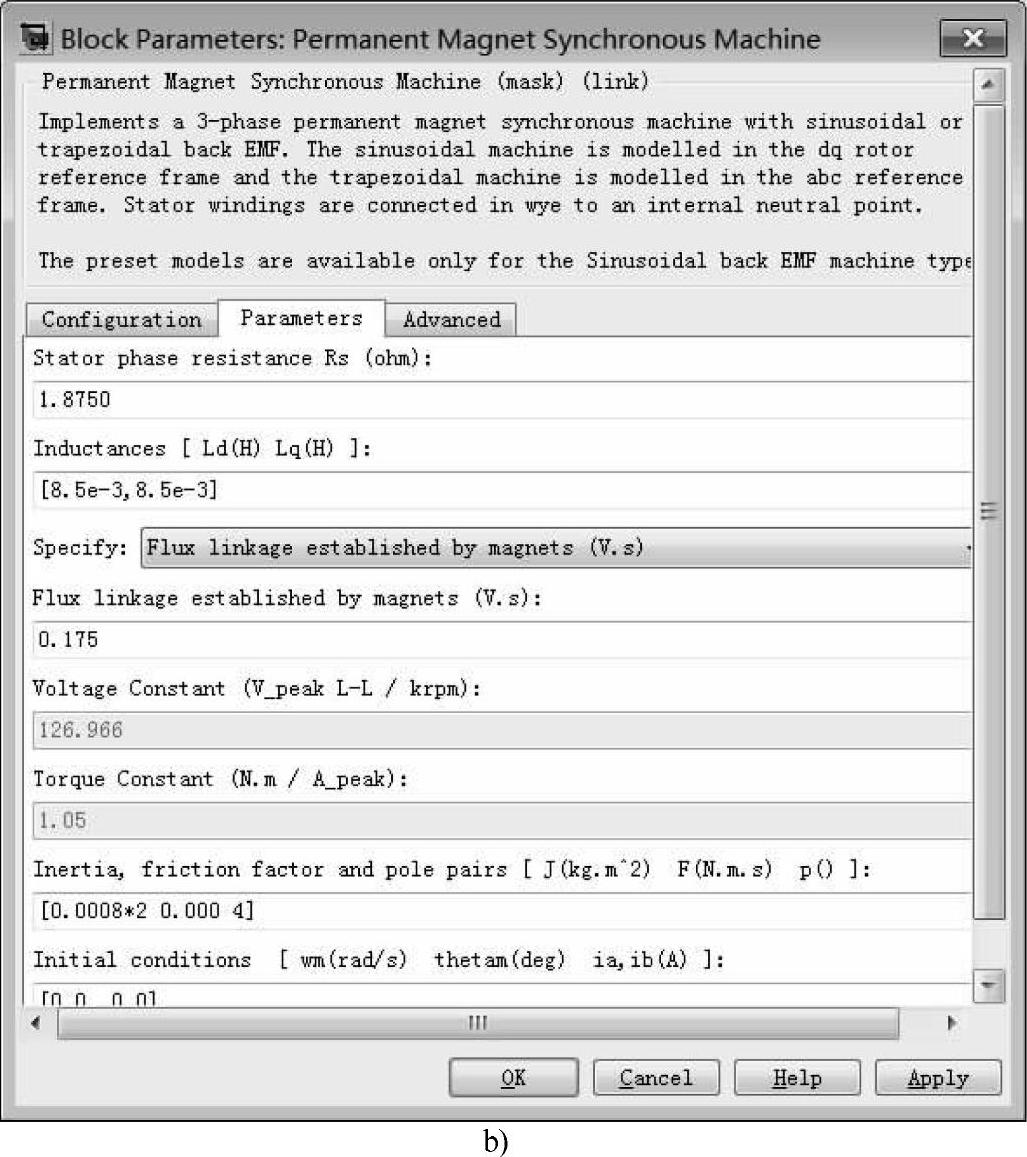
图12-27 电动机参数设置对话框(续)
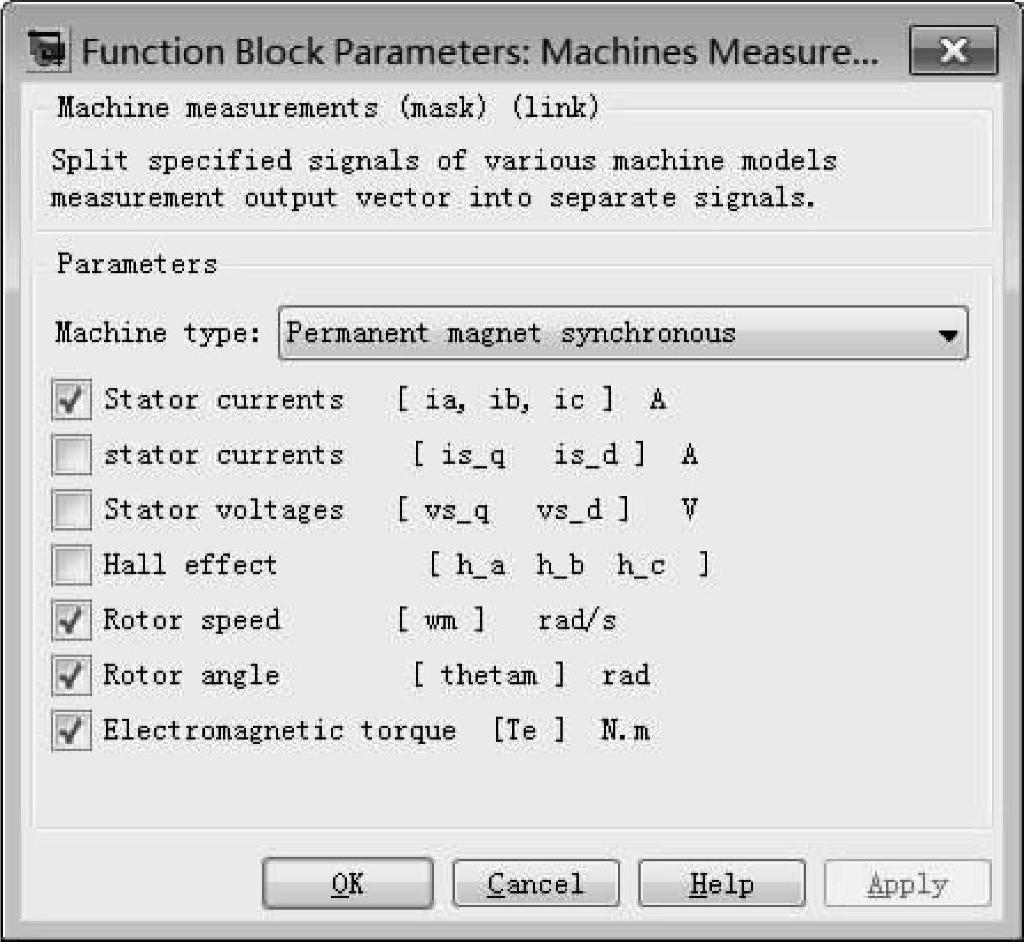
图12-28 电动机测量模块输出变量
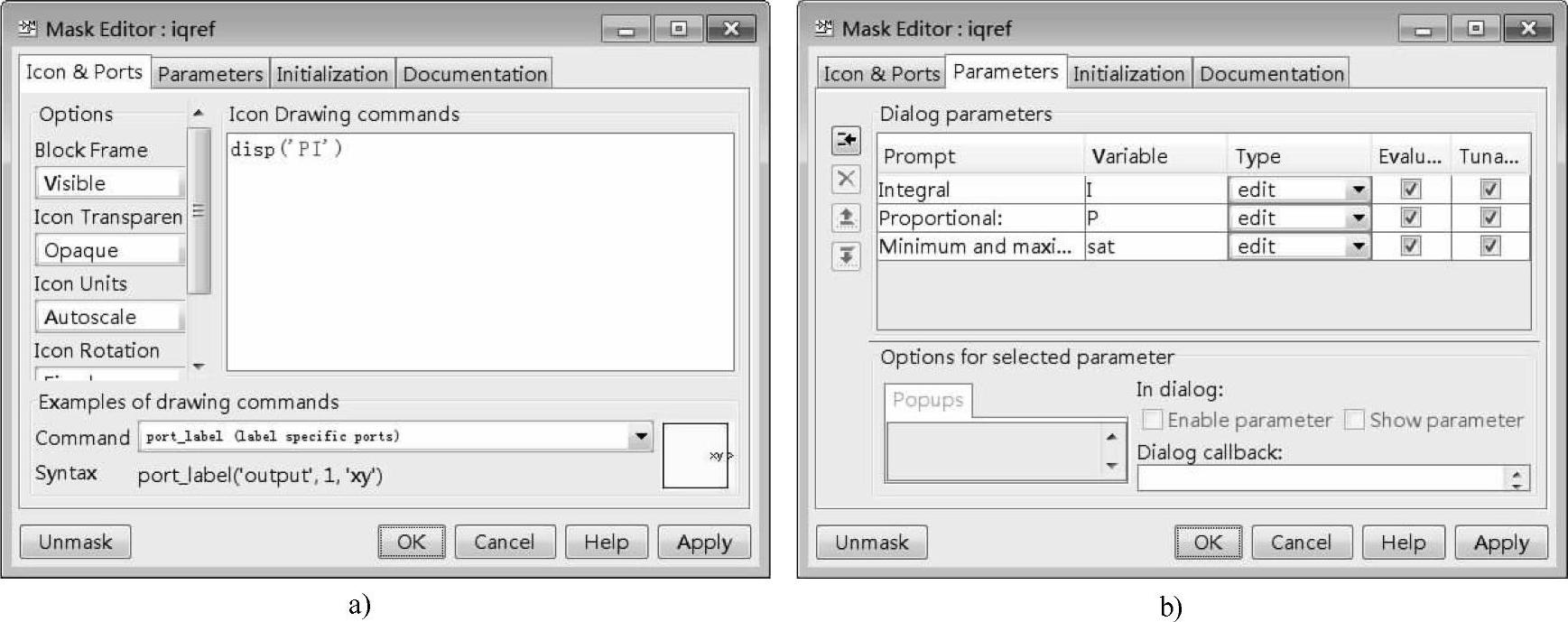
图12-29给出了图12-25中的转速ASR调节器的内部结构,可以看出这是一个带有内、外限幅的PI调节器,两个系数分别为P、I,上、下限幅值变量为max与min,采用一个名为PI的Scope模块进行波形观测。图12-30给出了对速度调节器子系统进行封装的界面,图12-30a中键入disp(‘PI’)可以在图12-25中的ASR模块上显示“PI”字符。图12-30b对图12-29中的变量进行了定义。在图12-30和12-31中可以很容易看出变量的对应关系,min、max两个变量来自于sat变量的两个分量。ASR封装完成后,双击图12-25中的ASR,则会弹出图12-32所示的调节器参数设置对话框。
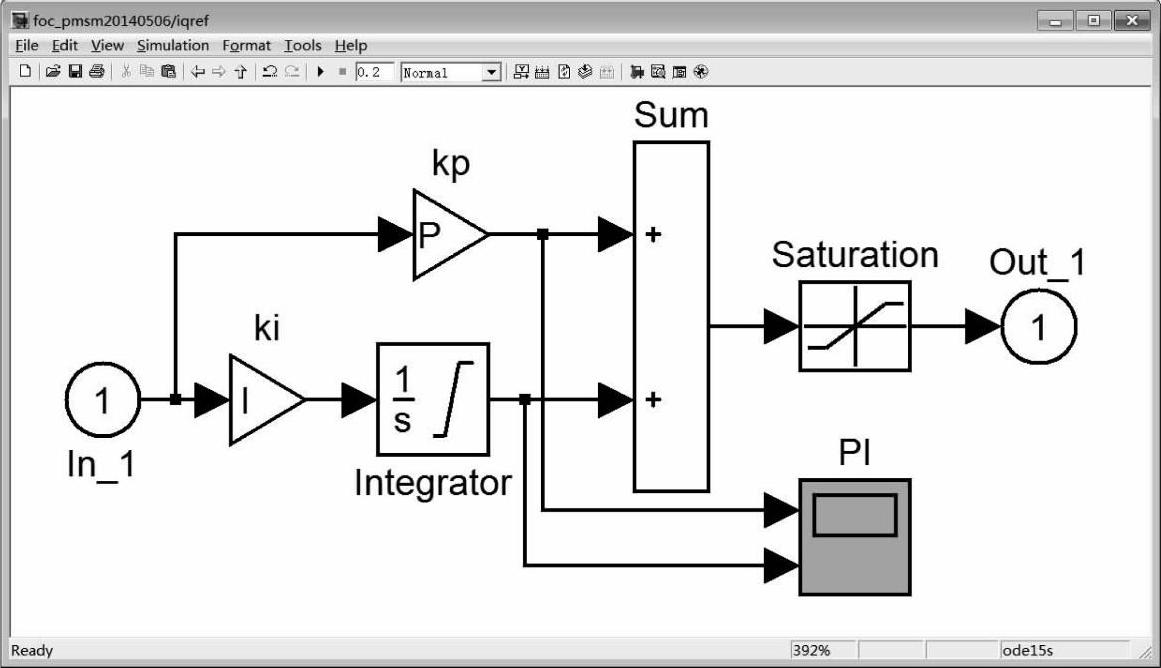
图12-29 ASR转速PI调节器内部结构图
 (https://www.xing528.com)
(https://www.xing528.com)
图12-30 ASR封装界面1
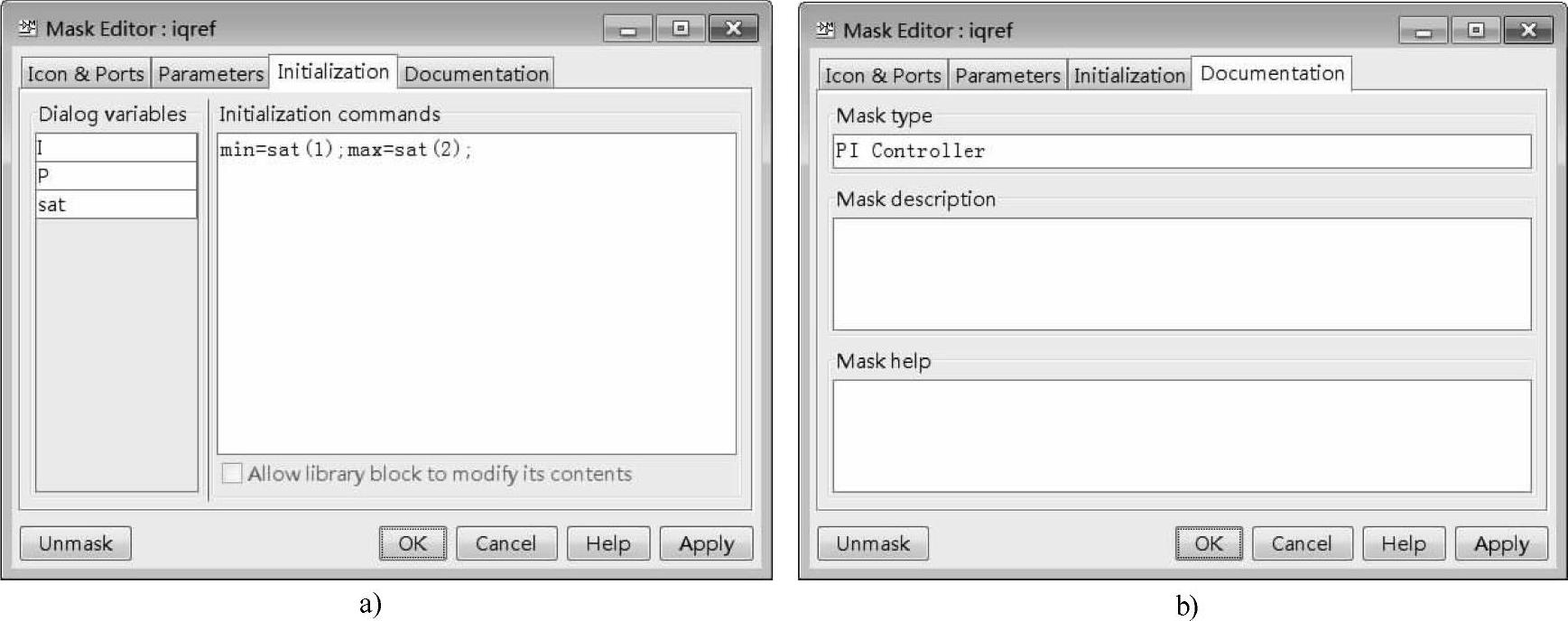
图12-31 ASR封装界面2
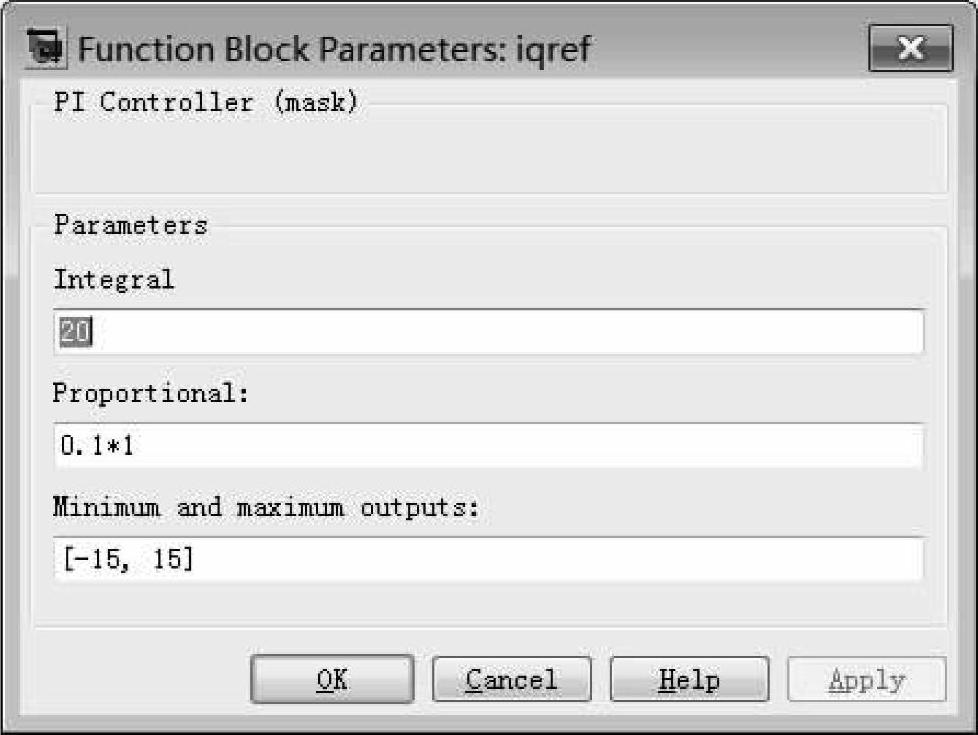
图12-32 ASR对话框参数设置
图12-25中的dq2abc子系统结构如图12-33所示,该模块的功能是将dq坐标系的电流指令值转换为三相静止坐标系的电流指令值。本仿真实例中的d轴电流指令值、零序电流指令值都设置为0,q轴电流指令值来自于ASR调节器。图12-33中采用了mux模块将坐标变换使用的4个变量综合到一起,然后在3个Fcn函数模块中通过语句进行坐标变换,4个变量按照进入mux模块的顺序分别采用u(1)、u(2)、u(3)、u(4)进行调用。3个Fcn的输出又通过mux模块合成为一个向量作为子系统的输出。显然,采用mux模块可以减少模块之间的连线数量。
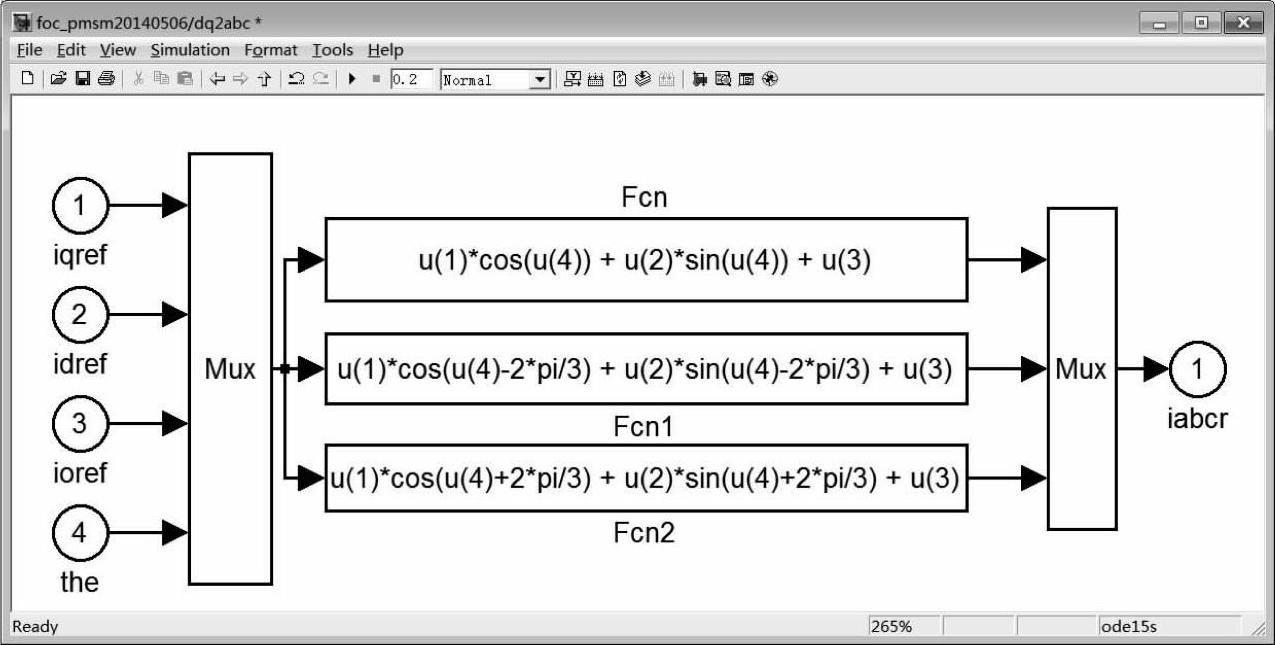
图12-33 dq轴电流指令变换为三相静止坐标系电流指令
图12-34给出了图12-25中PWM VSI子系统的内部结构。图中首先采用demux模块将电流指令值和电流反馈值进行分解,将某一相的电流指令值与实际值输入到一个compare子系统中进行比较并控制该相逆变器桥臂输出合适的相电压进行电流闭环控制。
图12-35a给出了一个compare子系统的内部结构图,图12-35b给出了Relay1模块的参数设置。时间常数为toi的传递函数模块(Transfer Fcn)对电动机相电流进行滤波,可以滤去A相电流中的高次谐波。继电器(Relay1)模块实现电流滞环控制功能,其输入为电流指令值与电流反馈值的差值,输出为A相相电压数值。Relay1的开通动作值(Switch on point)、关断动作值(Switch off point)分别为图12-26定义的电流滞环宽度(delta_i)的一半。Relay1的开通输出值(Output when on)、关断输出值(Output when off)分别为图12-26定义的逆变器直流侧电压(ud)的一半。Relay1实现的功能为:当电流指令值与电流反馈值的差值达到“开通动作值”时,输出高电平电压;当电流差值达到“关断动作值”时,输出低电平电压。

图12-34 三相电流滞环控制及逆变器子系统模块的内部结构图
图12-34compare子系统输出信号为SIMULINK中的信号(即数值信号),它是不能与图12-25中的电动机模型直接相连接的,需要使用图12-34中的受控电压源(Controlled Voltage Source)把数值信号转换为SimPowerSystems中的物理信号。
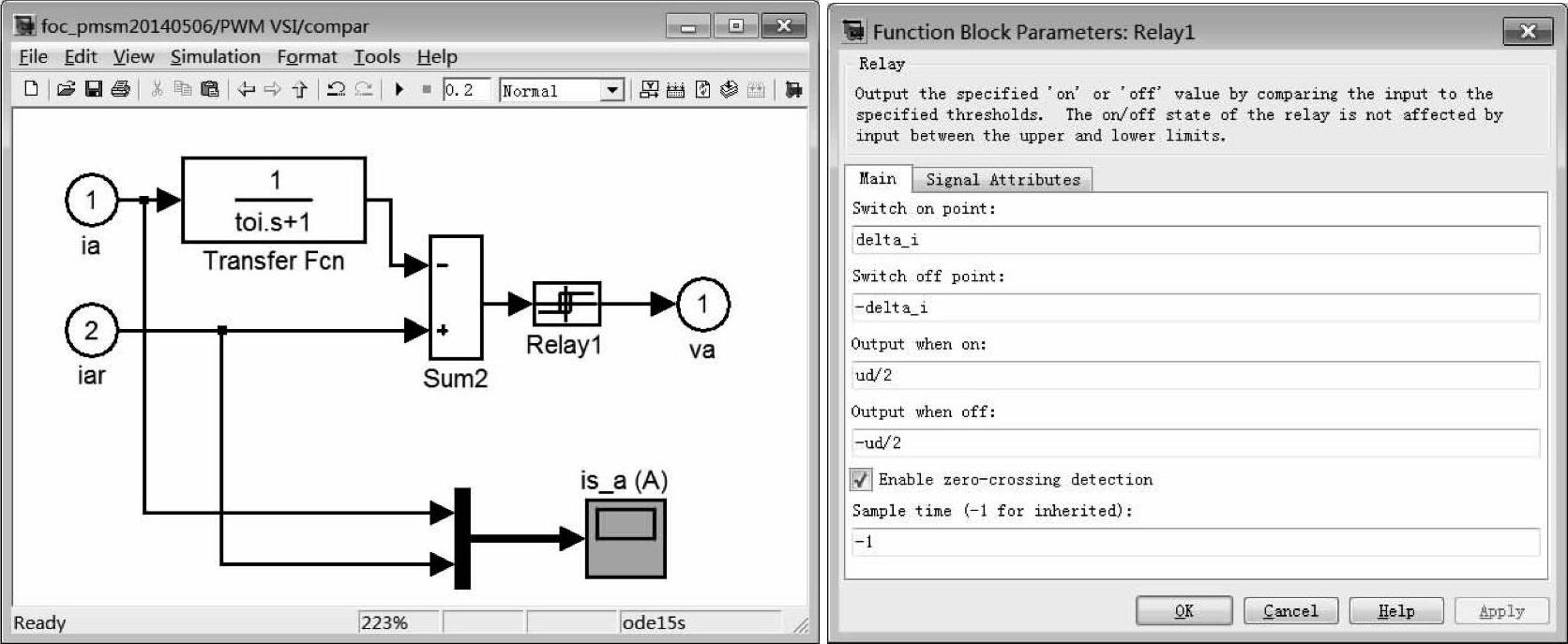
图12-35 电流滞环比较器内部结构及参数设置对话框
图12-36给出了图12-25中负载转矩模块(step)的参数设置,电动机的负载在0.1s时从1Nm阶跃变化为5Nm。
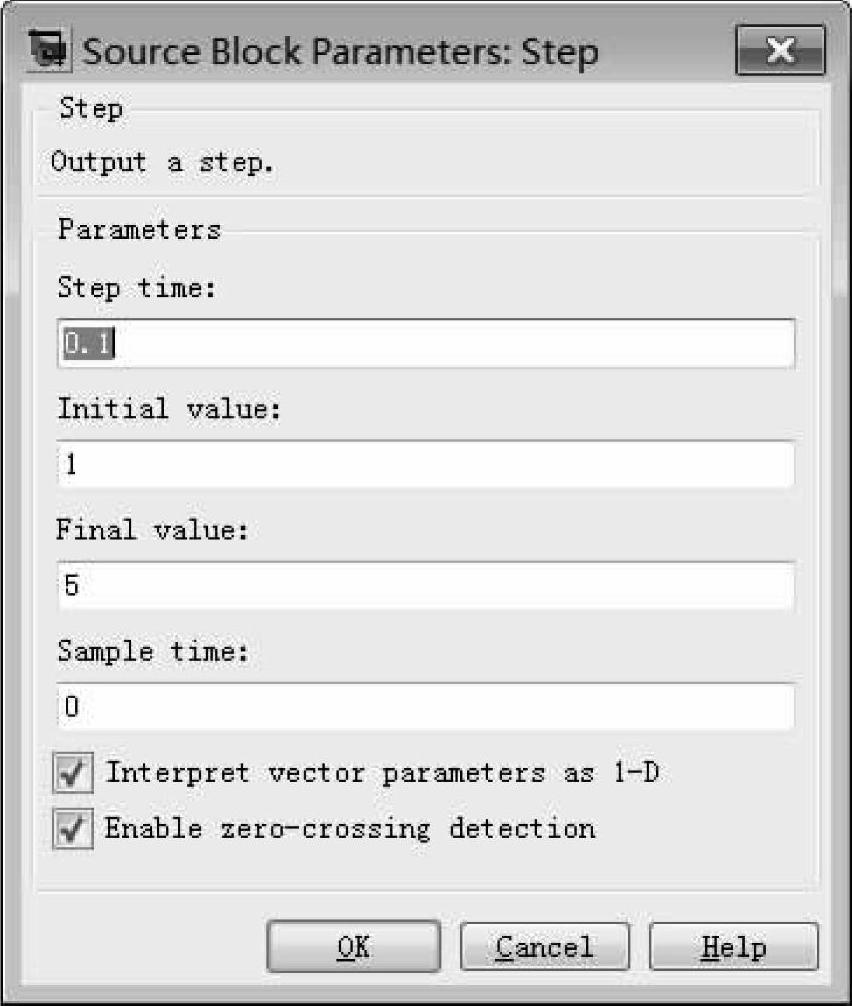
图12-36 负载转矩设置对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。