



如图9-24所示,为了引导电机的定子磁链沿着图中所示的准圆形轨迹移动,电压型逆变器必须在适当的时刻切换到合适的电压空间矢量。由电机控制策略可以得到一个期望的定子电压空间矢量给定值ug,或者说电机的控制目标是——在tg的时间内,控制电机定子磁链矢量的端点从点A移动到点B,接下来的具体工作就是控制电压型逆变器从8个基本电压空间矢量中做何选择,以使其在tg内实际输出的电压空间矢量对时间的积分与ugtg相等——即定子磁链变化量相等。
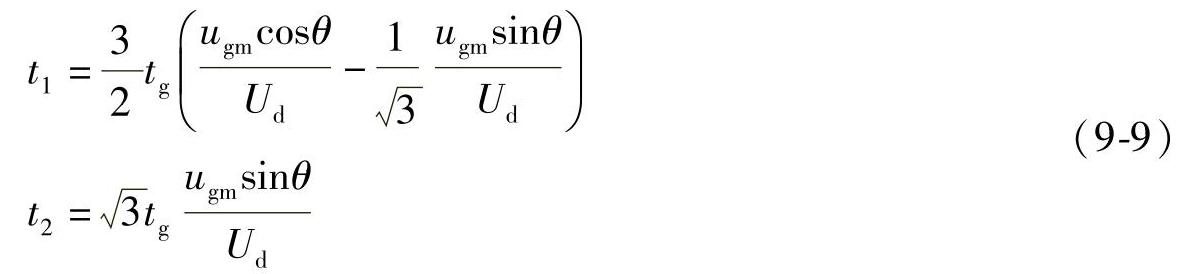
通常的SVPWM算法是,首先根据ug所处的空间扇区位置确定好准备输出的基本电压空间矢量,如图9-25b选取非零电压矢量U4与U6。记它们各自的作用时间分别为t1和t2,则有
U4t1+U6t2=ugtg (9-8)
然后根据式(9-9)就可以计算出t1和t2,式中ugm为矢量ug的幅值。
一般情况下,t1+t2≤tg,那么多余的时间t0就可以平均分配在两个零电压矢量U0和U7上,因为它们的作用并不会影响到逆变器输出电压矢量的积分。
t0=tg-(t1+t2) (9-10)
T0=T7=t0/2 (9-11)
当输出的PWM波形对称性比较好时,那么逆变器输出的电压谐波就比较少,图9-26给出了最常见的SVPWM波形。由于一个开关周期内逆变器先后输出7个电压矢量,故称为7段式SVPWM。(https://www.xing528.com)
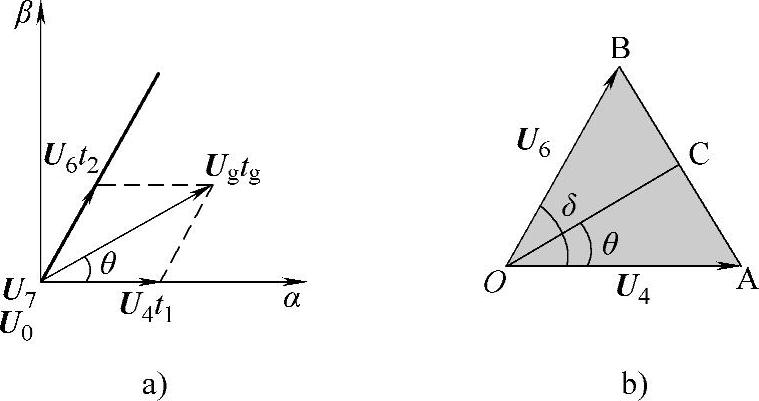
图9-25 空间矢量脉宽调制技术示意图
a)电压矢量合成方法示意图 b)合成电压矢量范围示意图
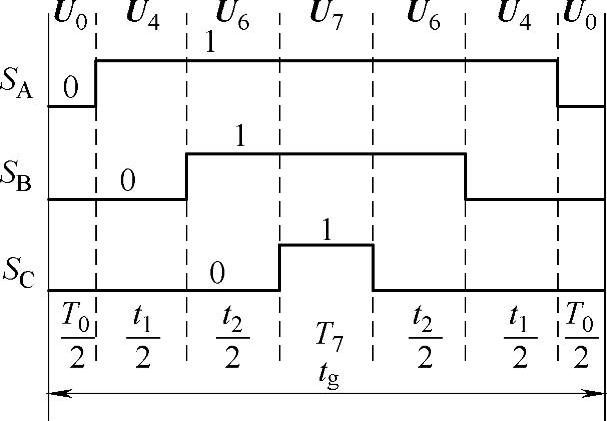
图9-26 各电压矢量时间分配图
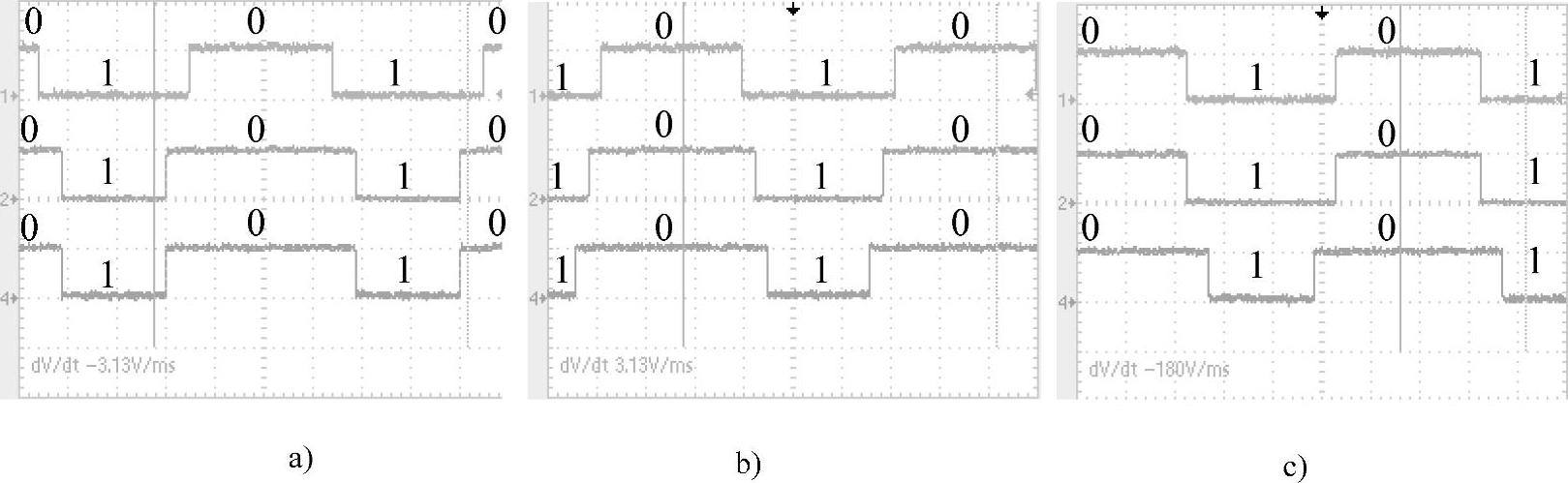
图9-27 DSP输出的PWM信号波形
当图9-25中的期望电压矢量相角分别为0°、30°、60°时,图9-27给出了采用数字信号处理器实现SVPWM算法输出的PWM信号。图中从上到下3个波形分别为A、B、C三相的开关状态,其中的高电平对应了开关信号为0,低电平对应了开关信号为1。从图9-25显然可以看出,当相角为0°时,应该采用U4与零电压矢量,没有U6的作用;当相角为30°时,需要采用U4、U6和零电压矢量;当相角为60°时,应该采用U6与零电压矢量,没有U4的作用,这与图9-27a中标注的开关状态完全吻合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。