



当电动机运行在高速情况下,定子电压达到其极限值时,随着转速的进一步上升,电流的控制将变得困难,因为此时电流的指令受到定子电压的限制。如果电流指令值设置的不合理,那么其闭环控制将失效,将会出现因为电压的饱和而导致的电流失控。显然当电压达到极限值时,电动机的电磁转矩受到其直接影响,本节将对此展开分析。
利用式6-10、式6-11、式6-12和式6-30的转矩公式,可以求得用电动机电压描述的电动机转矩公式,见式6-41。从中也可以看出,转矩分为两部分,前者是永磁转矩,后者是磁阻转矩。

对于定子电压峰值136V,转子速度4000r/min,针对前述的42kW电动机,当定子电压矢量相角从90°增加到270°的过程中,电动机转矩变化过程如图6-12所示。其中曲线1是式6-41中的永磁转矩,曲线2是式中的磁阻转矩,曲线3是合成的总电磁转矩。
从图中可以看出,随着电压的相位角从90°开始增加,转矩的趋势是先增加,然后在180°以后,转矩还是增加。但是当定子电压矢量位于第三象限内会出现转矩的最大值,最后在270°时,转矩回到0。
分析中的MATLAB程序如下:
下面的程序用于计算最大转矩对应的电压矢量角度计算。
在本例中,最大转矩出现时电压的相位角在205°。
既然式6-11和式6-12表明了电动机的id与iq和电压的直接关系,那么在电压受到限制的区域内是否可以通过图6-12直接进行转矩的有效控制呢?这并不合适。一方面电动机的电感参数明显受到电动机电流的影响,所以图6-12的曲线仅仅是根据给定的电感参数绘制的,在运行中会发生很大变化;另一方面图6-13给出了本例中当电压处于极限值时,id与iq随电压相位角的变化情况。其中曲线1是id,曲线2是iq,曲线3是相电流幅值。显而易见,在电压相位角大于180°以后,定子电流幅值发生明显增加,无论对电动机本身,还是对实际调速系统都是难以接受的。
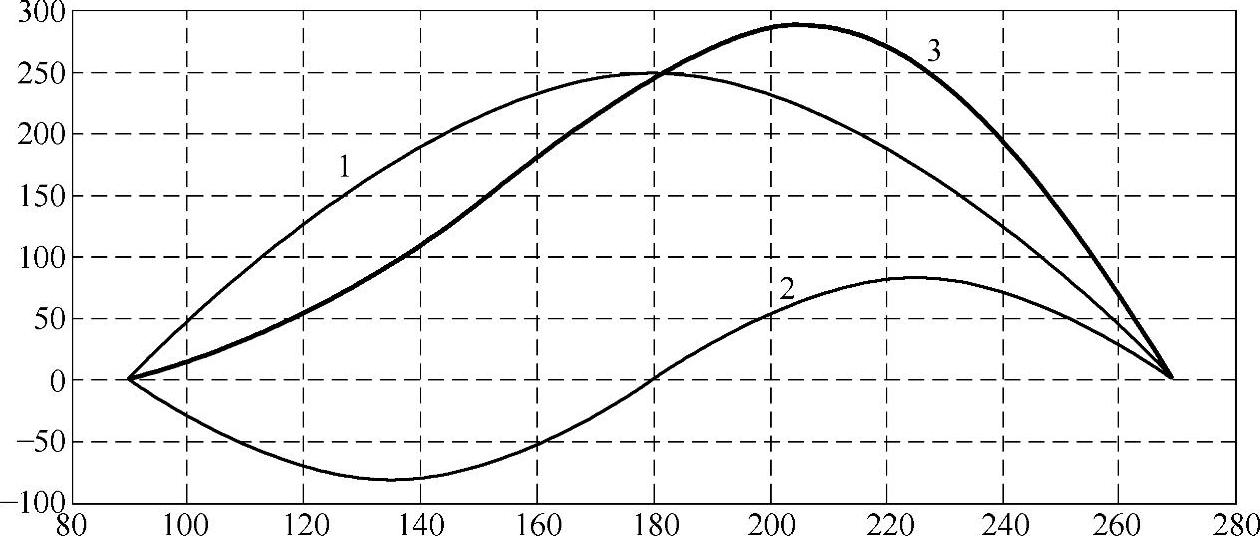
图6-12 转矩与电压相位角的关系图
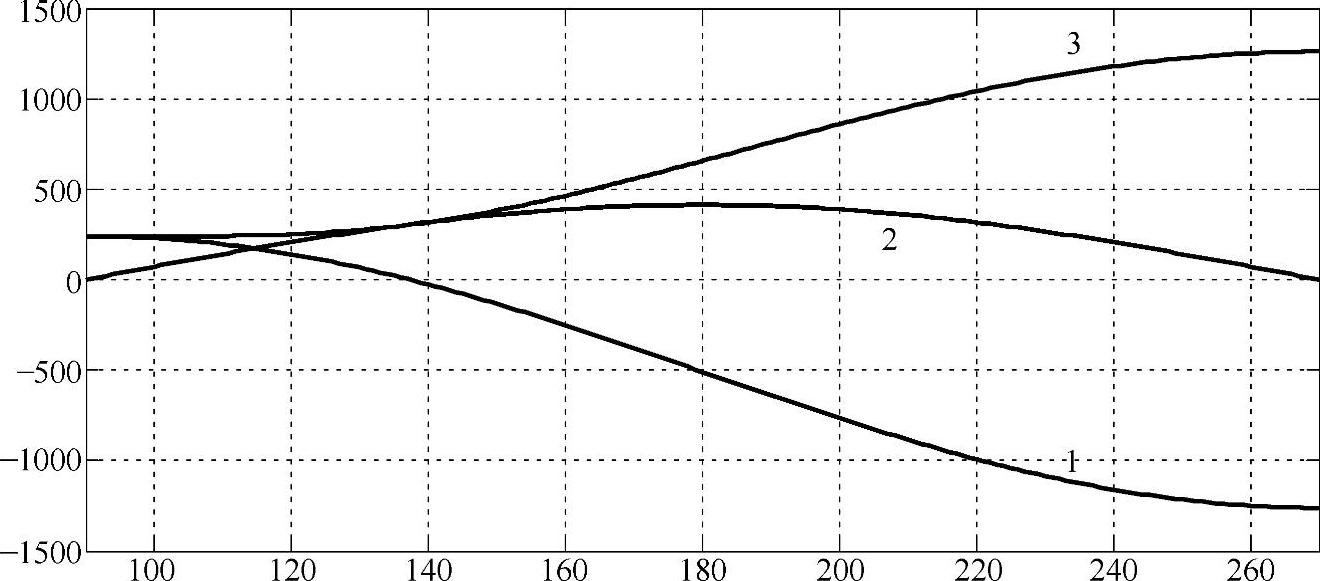
图6-13 在电压受限情况下id、iq曲线图
在图6-12中,假定期望输出的电动机转矩是210Nm,从中可以得出电压矢量的相位角为167°和237°两个解。当电压相位角为167°时,根据式6-11和式6-12可以求得id=-340和iq=403,此时的电动机矢量图如图6-14所示。(https://www.xing528.com)
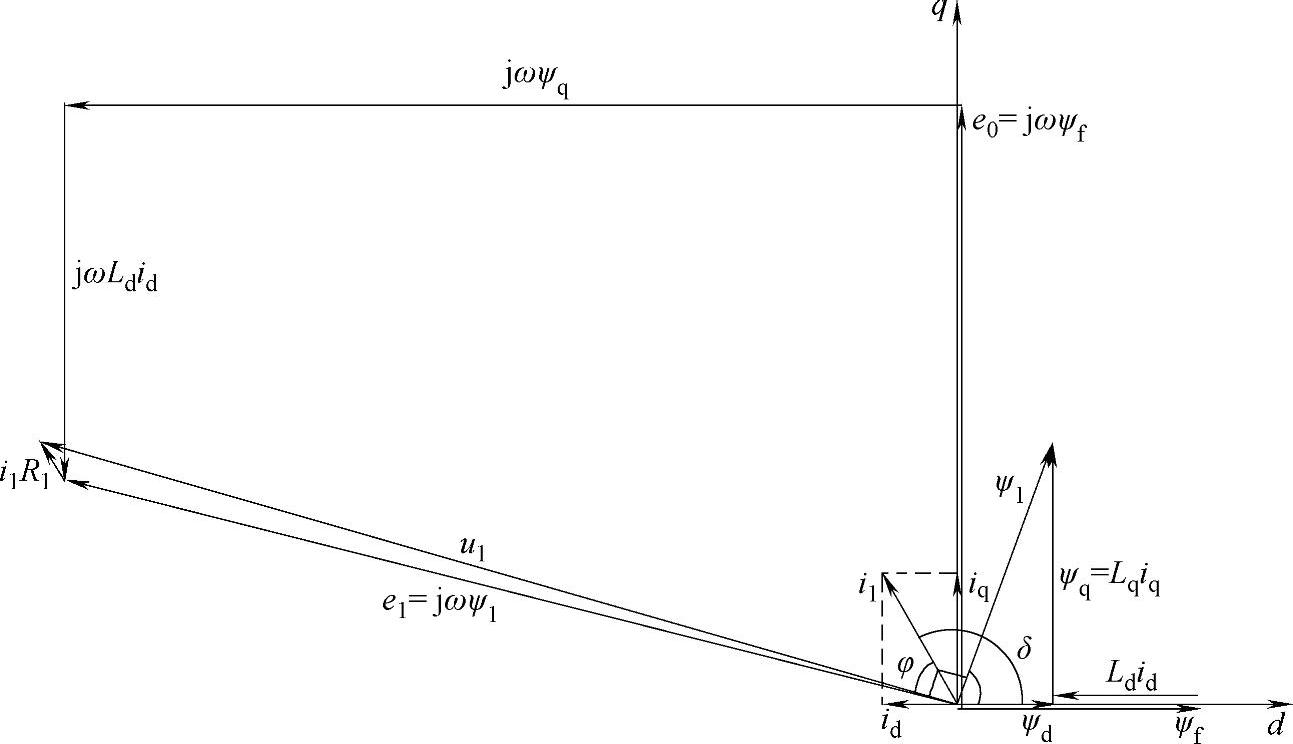
图6-14 电压相位角为167°时的矢量图
永磁磁链产生的反电动势(e0)大约为92V,它与iq对应的旋转电压(ωψq)合成后大约为161V,这个量明显大于前面给定的136V。正是由于图中弱磁电流id的弱磁效果(ωLdid)——减少了定子绕组的反电动势,使其略小于定子端电压。所以,弱磁的效果从图中可以非常明显地看出。
上述的第二个解对应的电动机矢量图如图6-15所示。可以看出图中的id明显增加许多倍,从而使得d轴的合成磁场从d轴的正方向变为了负方向,这即是说,id不仅完全抵消了原有的永磁磁场,并且自己又重新建立了d轴的反向磁场——从原理上来说,这大可不必。另外电流增加也过于明显,实际控制中并不允许。
鉴于前面分析指出,电压相位角不适于在第3象限内,那么假定其相位角最大为180°。可以看出,在90°到180°范围内,转矩的最大值就出现在180°,下面进行分析与比较的最大转矩就是指180°相位角时的电动机转矩。
本例中的PMSM在实际调速系统中的定子电压限值为216V,为此分析电动机运行在该限值下,当电动机运行速度从4000r/min上升至12000r/min时,电动机的转矩与电压相位角的关系如图6-16所示。
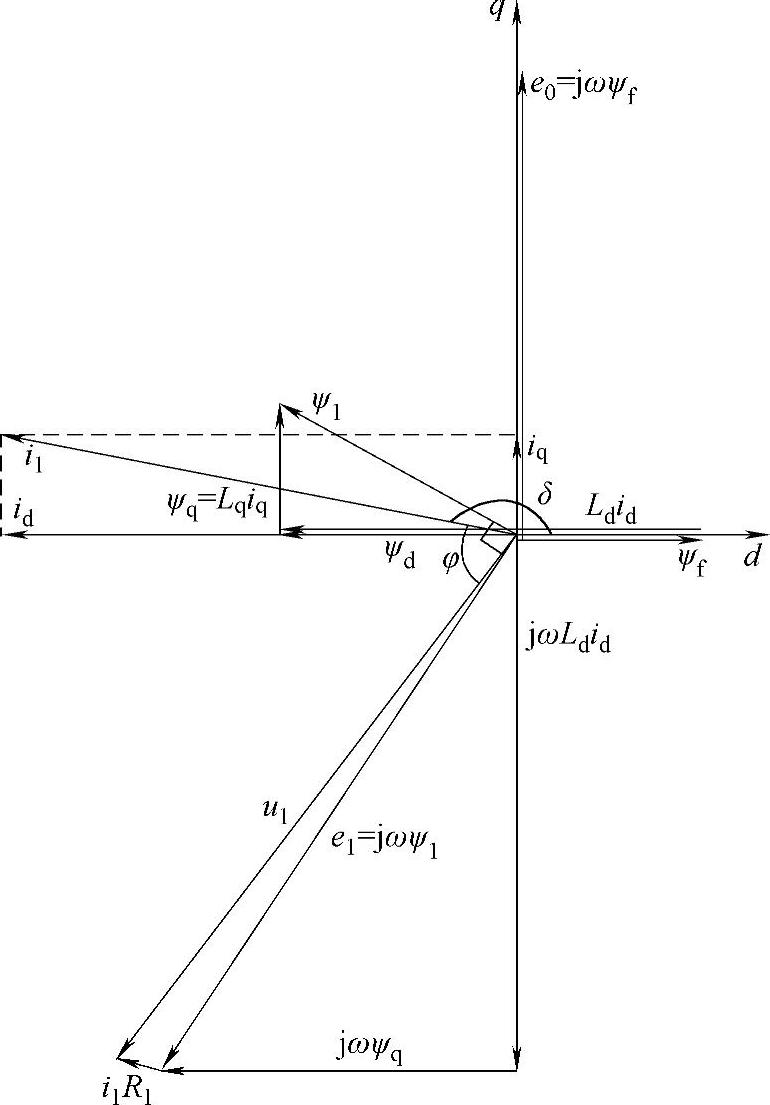
图6-15 电压相位角为237°时的矢量图
从图6-16中可以看出,不同速度下,在电压受到限制时,电动机的最大转矩随着速度的增加而减小。因为180°相位角的转矩仅仅是永磁转矩,即公式6-41中的第一部分,显然最大转矩与转速成反比例。
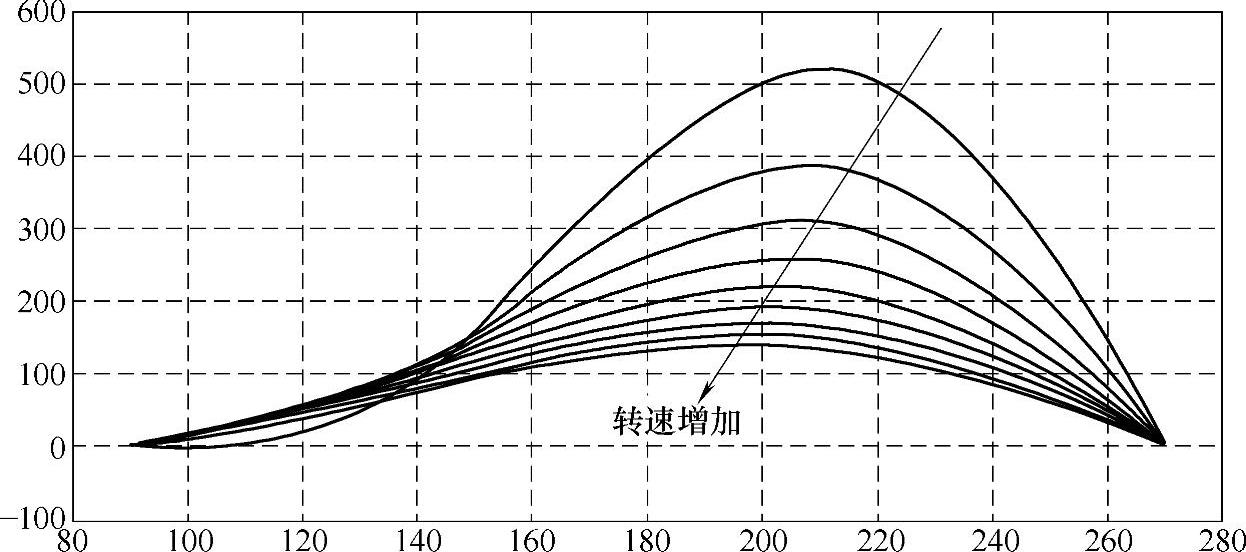
图6-16 不同速度下电压相位角与转矩关系图
本书中采用了下述MATLAB程序进行的上述分析。
nm=4000:1000:12000
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。