



SIMULINK的子模块库——连续(Continuous)模块的子库中有传递函数(Transfer Fcn)和状态空间方程(State-Space)模块,可用来方便地搭建线性多输入多输出系统。根据PMSM的dq轴数学模型(式3-55、式3-58、式3-61)可以看出PMSM系统为高阶、非线性、多输入多输出系统,所以传递函数模块不适用于这里。PMSM模型只能用其他分立模块实现,打包封装后的仿真模型见图4-3a,其内部结构图如图4-3b所示。
图4-3b中的电动机模型建立在电动机转子dq旋转坐标系,图中abc2dq子系统利用转子位置角将三相静止坐标系的正弦电压变换到dq坐标系;PMSM_nons利用电动机的电压方程、磁链方程、转矩方程、运动方程对电动机进行建模,根据dq坐标系的电压与负载转矩求解出电动机的转速、转矩、定子电流的dq轴分量和转子位置角。
图4-4给出了abc2dq子系统的内部结构图,里面采用了一个Mux模块将4个输入信号合成为一个;然后采用两个函数模块(Fun)进行ABC坐标系到dq坐标系的旋转变换(输出为ud与uq)。图4-5给出了双击PMSMnons子系统后出现的参数设置对话框界面,通过该界面可以直接对电动机的电感、电阻、磁链、极对数、转动惯量等参数以及电动机电流、转速、位置的初始值进行设置。

图4-3 基于分立模块的PMSM模型
a)打包封装后的模块 b)双击模块后显示的内部结构图

图4-4 abc2dq内部结构图
图4-6给出了PMSM_nons子系统的内部结构图,可以将鼠标右键单击PMSM_nons子系统,然后在菜单中选择Look Under Mask,即可出现该界面。
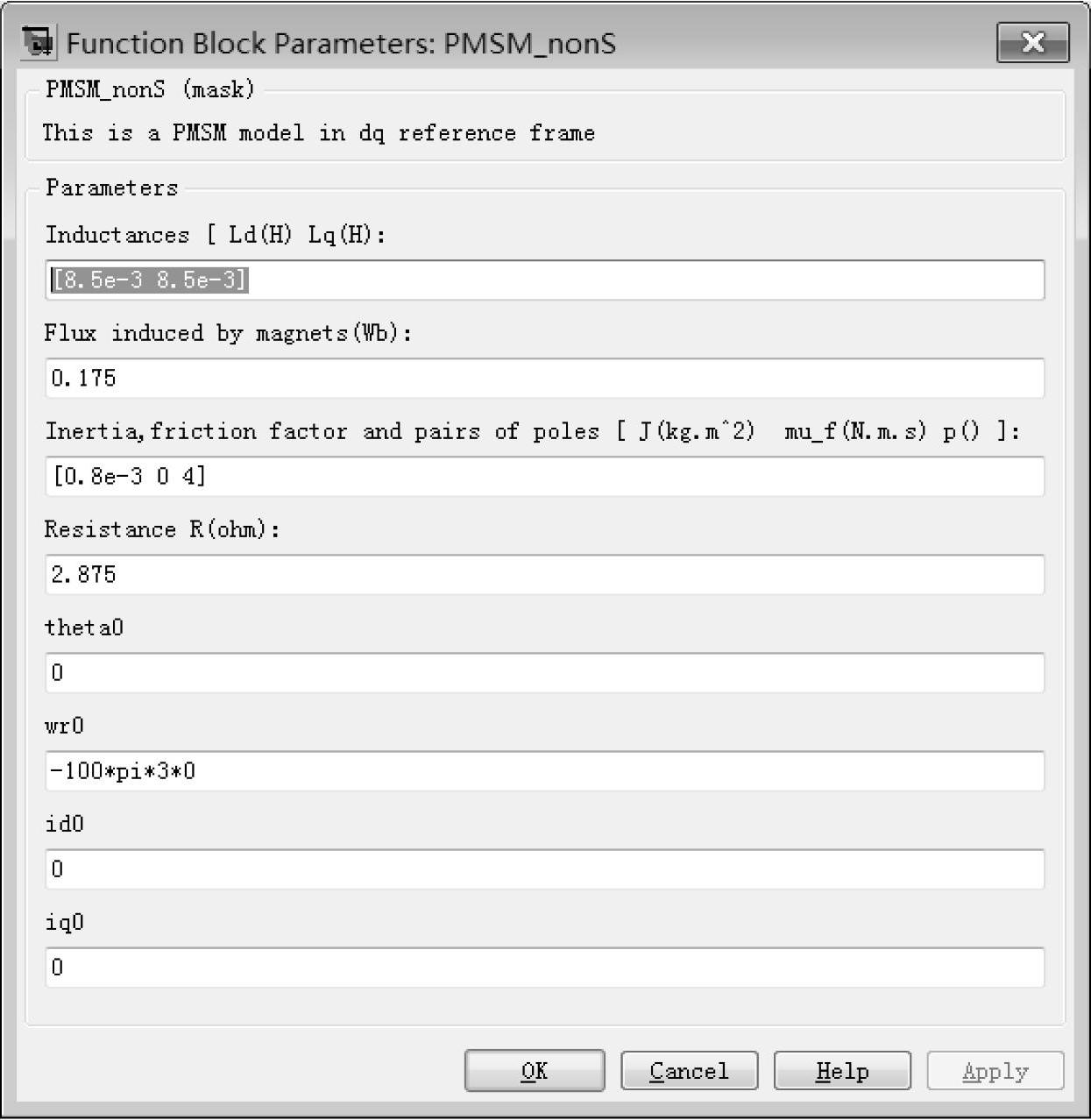
图4-5 PMSMnons对话框
附录B给出了采用分立模块搭建的永磁同步电动机仿真模型,可以看出,图中用来进行变量传递的连线太多,不太容易检查与纠错。在图4-6中,为避免出现众多连线的交叉,使用了SIMULINK模块库的信号连接(Signal Routing)子库下的信号跳转(Goto)模块和信号接收(From)模块进行变量值的传递。整个模型分为4个区域:输入部分、输出部分、计算部分和电动机参数输入部分。计算部分包括5个子系统(Subsystem):id计算(calculate id)子系统、iq计算(calculate iq)子系统、ω计算(calculate wr)子系统、Te计算(calculate te)子系统、θ计算(calculate theta)子系统。请参考本书412页将本例中goto模块中的变量作用范围设置为global。
id计算(calculate id)子系统:
由式3-55和式3-58可以推出id的导数为

上式经过积分环节可得出id。这个过程在SIMULINK中可以用如图4-7的形式实现。图中使用了SIMULINK连续模块(Continuous)子库中的积分(Integrator)模块。
同理可以得出其他计算子系统的模型,分别如图4-8、图4-9、图4-10和图4-11所示。需要提醒的是图4-10中计算的是机械角速度。
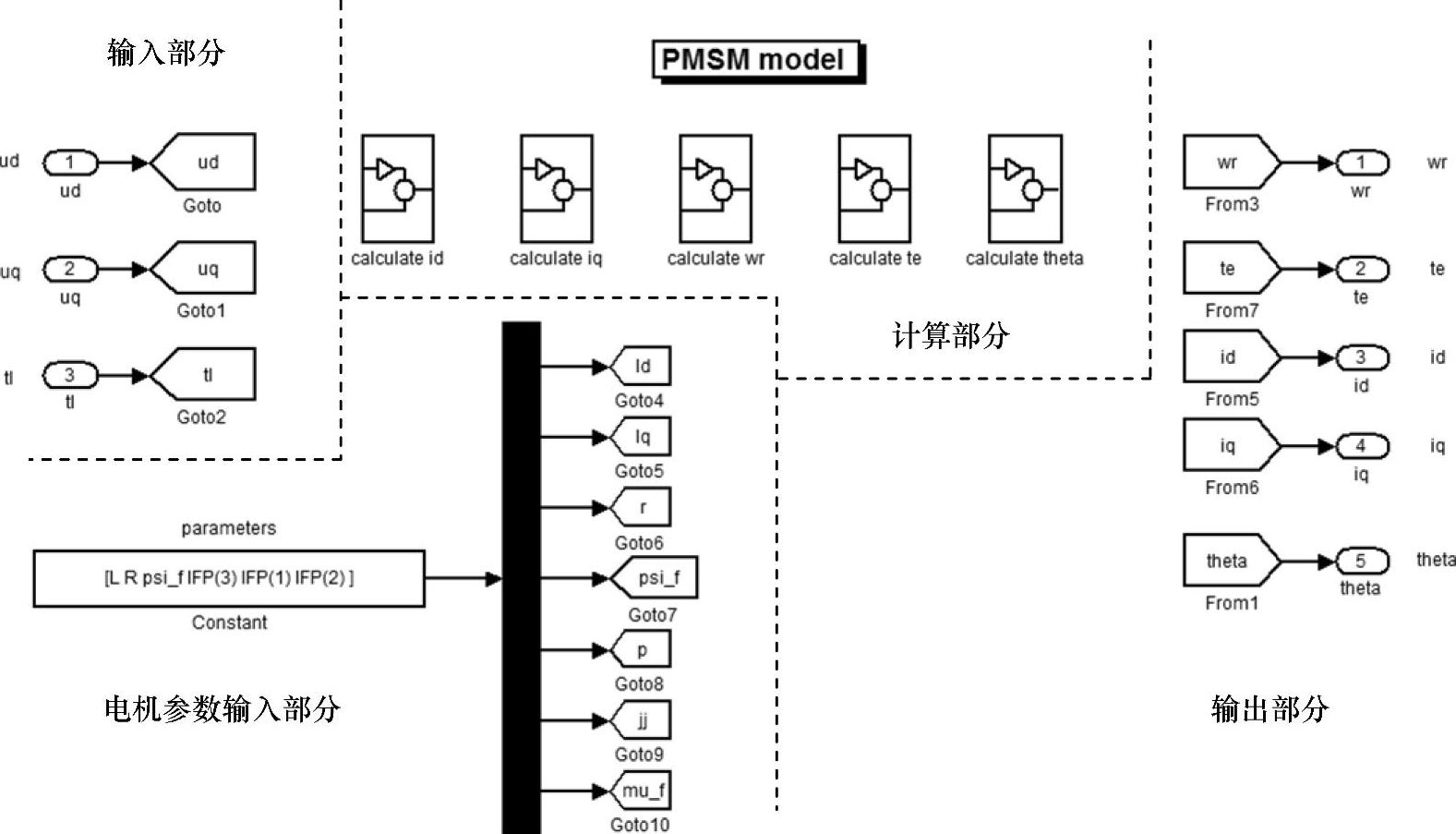
图4-6 PMSMnons内部结构图
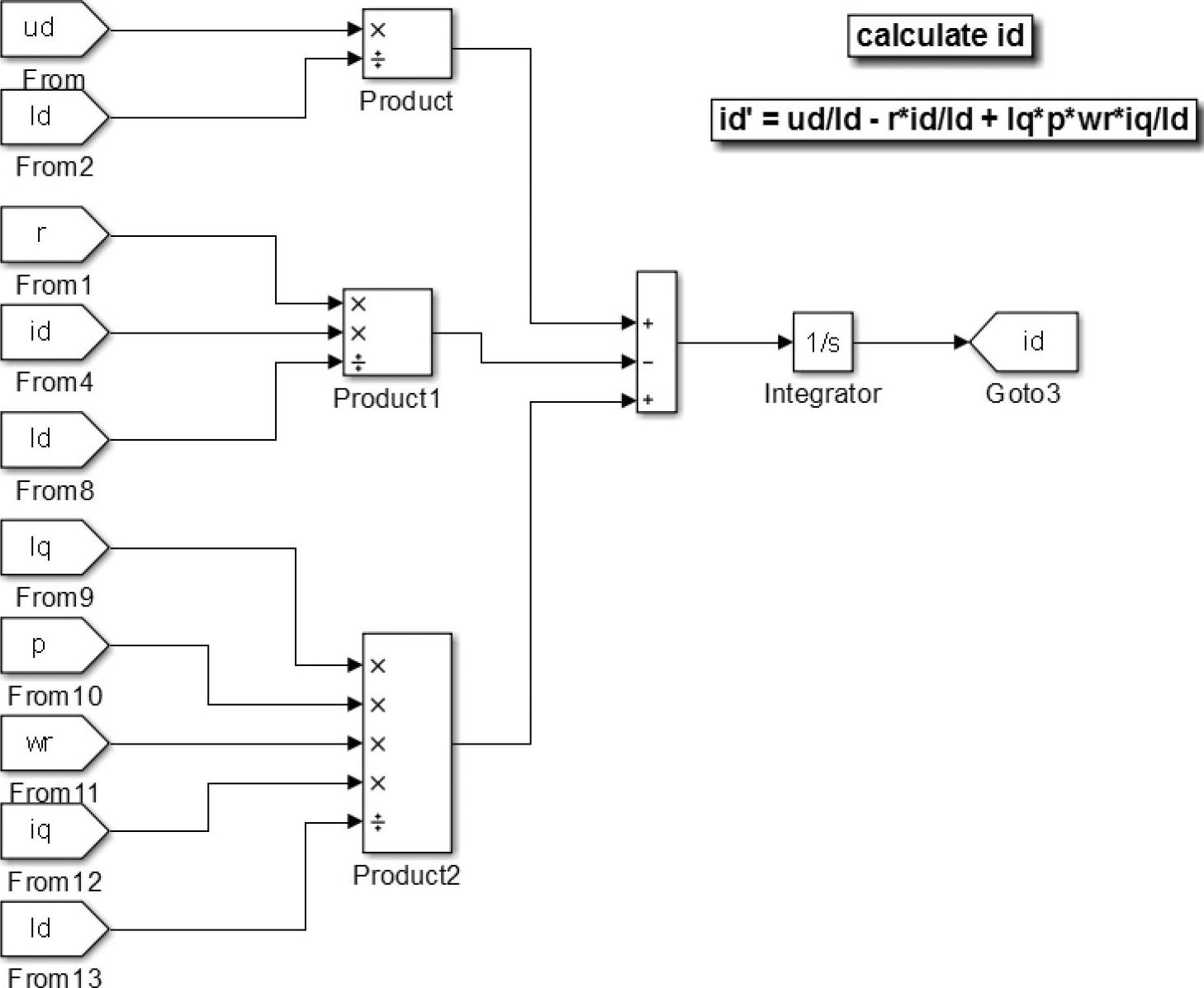
图4-7 id计算(calculate id)子系统内部图

图4-8 iq计算(calculate iq)子系统内部图(https://www.xing528.com)

图4-9 Te计算(calculate te)子系统内部图
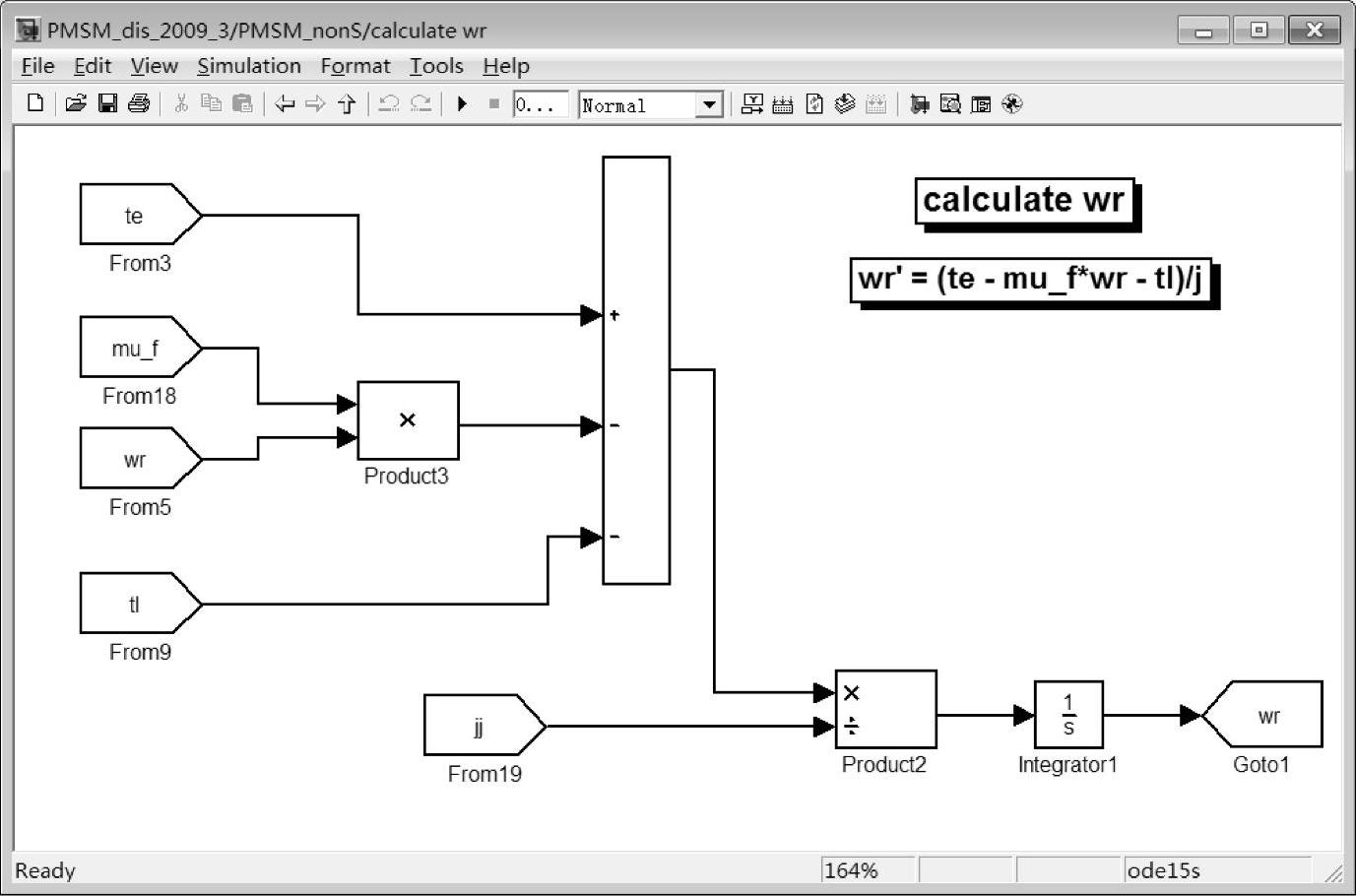
图4-10 ω计算(calculate wr)子系统内部图

图4-11 θ计算(calculate theta)子系统内部图
图4-12将dq坐标系的定子电流变换到三相ABC静止坐标系中,并且通过mux模块后合成一个信号输出。
图4-13给出了PMSMnons模块的封装与变量相互传递的对应关系图。图4-3a中PMSMnons子系统封装(mask)过程出现的变量编辑界面如图4-13右上角界面所示。图4-6中的Constant常数模块如图4-13左上角所示,双击后出现对话框见图4-13左下角界面,Constant的数据来源于电动机参数输入对话框(图4-13右下角,PMSMnons在封装完毕后,当鼠标双击该模块后即会出现此对话框),并输出到分解(Demux)模块分解信号以后输出到各个信号跳转(Goto)模块,以用于各子系统的模型中。

图4-12 dq2abc子系统内部结构图
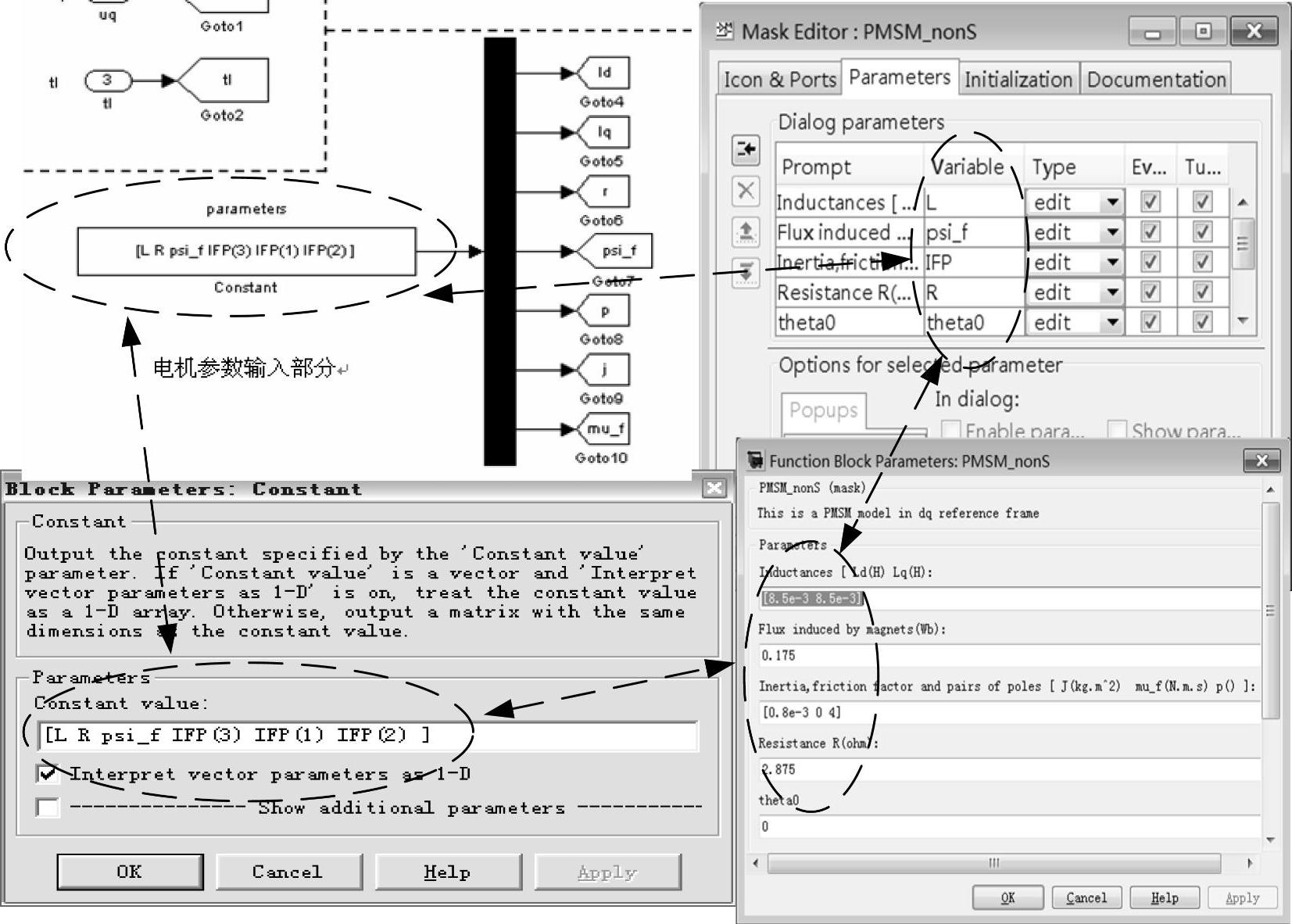
图4-13 电动机参数对应关系图
针对图4-3a的电动机模块,采用恒压恒频的正弦交流电驱动该电动机,仿真程序如图4-14所示。
图4-14中的正弦波模块(Sine Wave)的参数设置如图4-15所示,图4-16给出了电动机的负载转矩设置对话框。图4-17给出了仿真时间1秒内的仿真波形图,从上到下分别为电动机的机械角速度(rad/s)、电动机转矩(Nm)、dq轴电流(A)、三相abc电流(A)。

图4-14 正弦波供电仿真程序界面
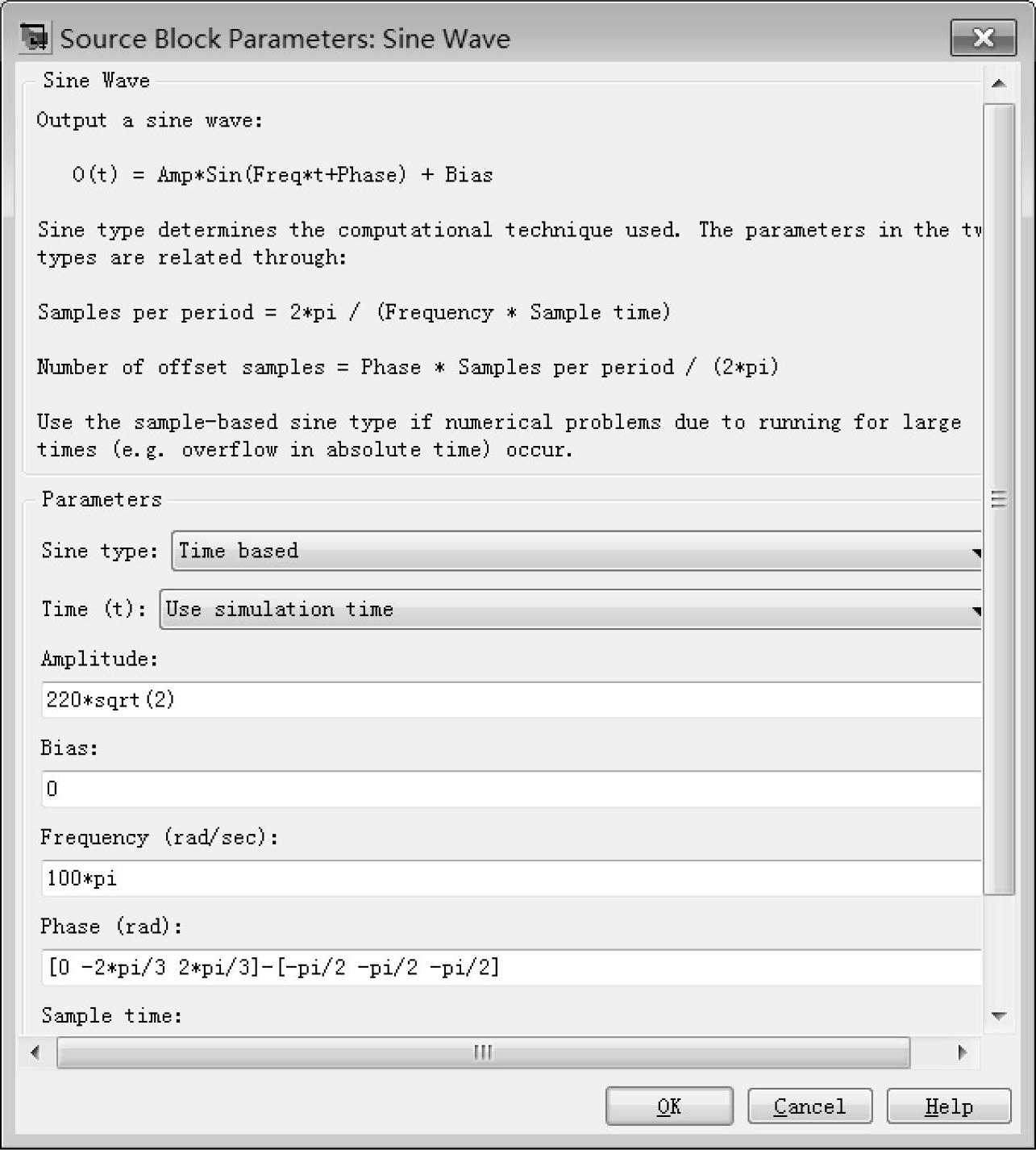
图4-15 输出三相正弦波信号的参数设置
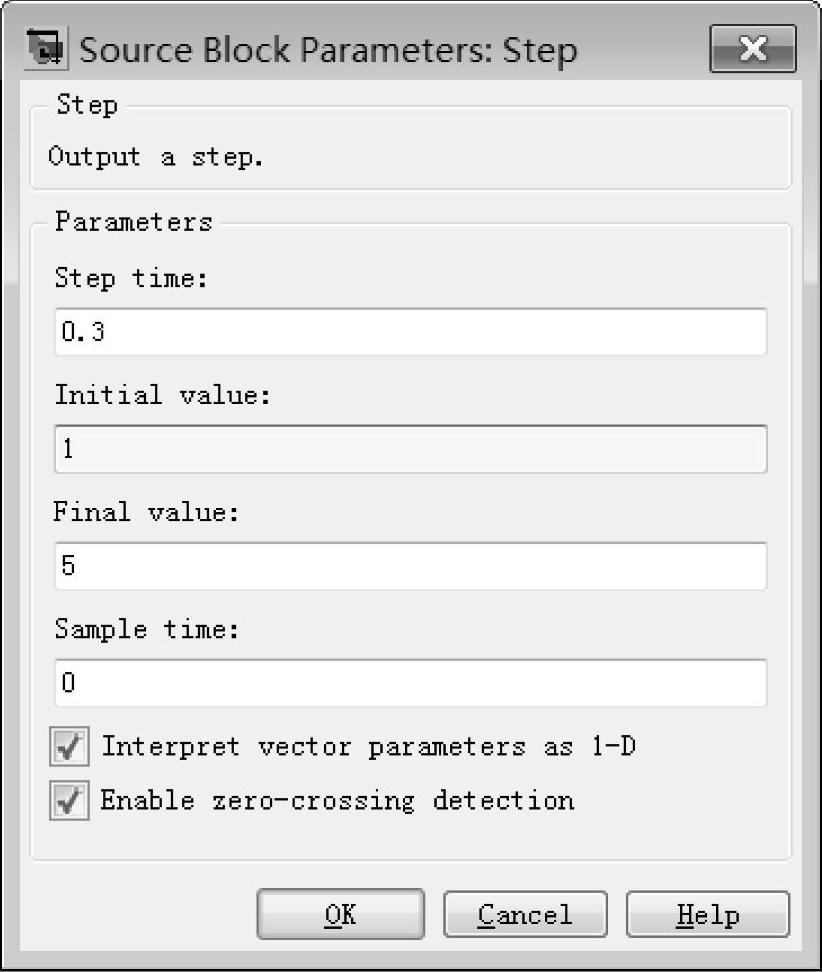
图4-16 电动机负载转矩设置
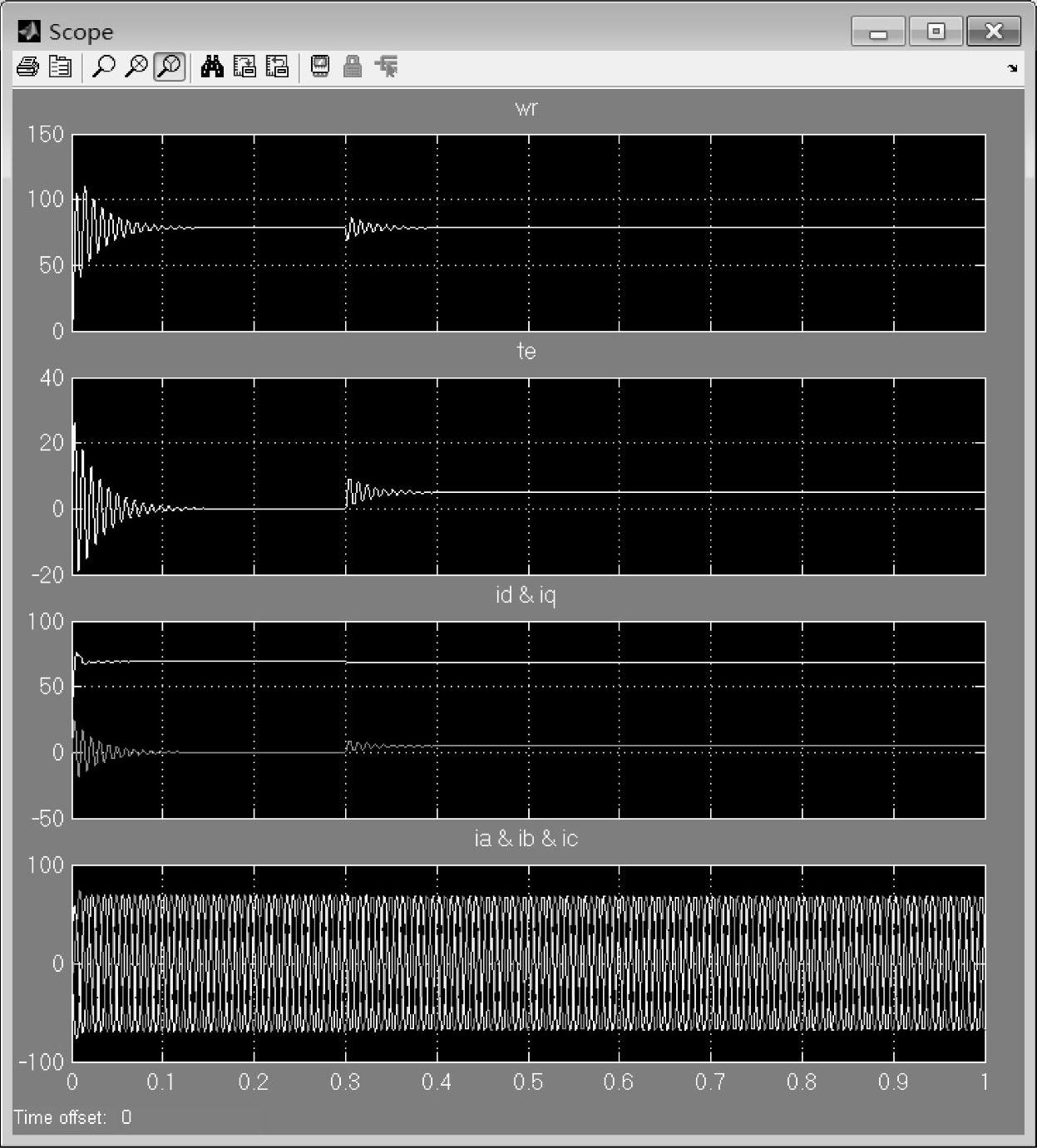
图4-17 仿真波形图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。