



现以基本节距p=9.525mm的HV3型非圆形基准孔的新型Hy-Vo齿形链为例,阐述变异Hy-Vo齿形链-链轮-刀具齿条的啮合设计方法。
图4-34给出了同一规格、同一节距的2种变异HV3型Hy-Vo齿形链-链轮-刀具齿条的啮合示意图。图4-34中实线所示的称为1号Hy-Vo齿形链-链轮-刀具齿条系统,图4-34中虚线所示的称为2号Hy-Vo齿形链-链轮-刀具齿条系统,均以xo1y和齿槽对称中心线n-n为设计基准。
1)如4.7.2所述,1号Hy-Vo齿形链基本节距p=9.525mm,工作链板齿形角α=30°,基准边心距f=5.0mm,其工作链板孔基准圆的圆心距A=8.16mm,异形销轴大端面表面的曲率半径r=7.4mm,工作链板孔基准圆圆心至异形销轴大端表面的距离Sm=0.70mm,异形销轴在工作链板孔内的定位偏置角γ=3°40′,p′=9.5268mm。
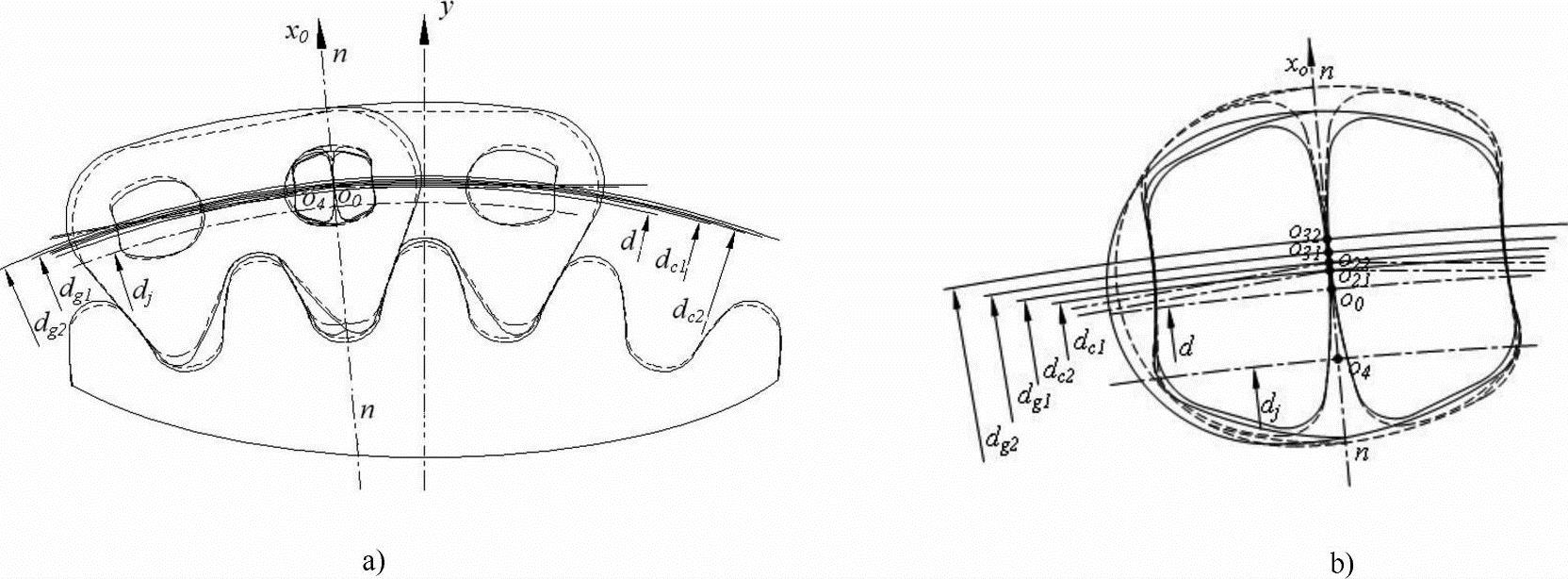
图4-34 变异Hy-Vo齿形链-链轮-刀具齿条啮合示意图
a)啮合示意图 b)局部放大示意图
链轮节距p1=9.525mm,链轮齿数z=35,渐开线压力角α1=31.5°,p″=9.5603mm,f2=4.394mm。
滚刀法向齿距为
由此可以求出其节距增量为
Δp=p″-p2=0.1825mm(https://www.xing528.com)
而对应于节距增量Δp的当量边心距增量为

则假想的对应于节距为p0(p0=p2)时的Hy-Vo齿形链的初始当量边心距为
f0=f2-Δf=3.966mm
加工Hy-Vo齿形链链轮时滚刀(p2=9.3778mm、α2=30°)的变位系数为

2)2号Hy-Vo齿形链基本节距p=9.525mm,工作链板齿形角α=30°,基准边心距f=4.74mm,其工作链板孔基准圆的圆心距A=8.75mm,异形销轴大端表面的曲率半径r=7.5mm,链板孔基准圆圆心至异形销轴大端表面的距离Sm=0.41mm,异形销轴在链板孔内的定位偏置角γ=4°,链轮节距p1=9.525mm,链轮齿数z=35,压力角α1=31.5°,令滚刀法向齿形角α2=30°,滚刀法向齿距p2=9.3778mm,则由式(4-1)、式(4-3)、式(4-6)、式(4-22)计算求得的p′=9.5315mm,p″=9.5702mm,f2=4.3849mm,x=-1.32235。
应该指出,1号Hy-Vo齿形链的较长的工作链板孔所具有的在拉力或推力的作用下的链节伸缩性和灵活性,更适用于多边形效应较小的Hy-Vo齿形链双相传动(即同一根传动轴上的两个链轮轮齿相位差为π/z的双排Hy-Vo齿形链传动),以避免啮合时的干涉。
由上述1号链和2号链的设计与计算结果可以看出,对于同一规格、同一节距的Hy-Vo齿形链,在满足Hy-Vo齿形链-链轮-刀具齿条三者正确啮合条件下,先确定极点O0的位置,然后在其上方分别确定一个或多个O2点的位置,则可以通过多元变异手段,在保证拉直状态下其节距p′位于允许的公差范围内的一致性的前提下,设计出参数不同的一族新型传动,以满足众多主机不同的“个性化”需求。
由z1=35、z2=36、链节数Lp=84节分别组成的1号Hy-Vo齿形链系统和2号Hy-Vo齿形链系统的平稳传动的试验结果表明,基于多元变异的Hy-Vo齿形链的设计方法是科学的,也是切实可行的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。