



FM355的参数化软件光盘随硬件包装携带,参数化软件以STEP7为平台,直接安装后,在“SIMATIC Manager”硬件配置中可以对FM355模块进行参数化。以FM355C为例,介绍参数的设置。
打开“SIMATIC Manager”硬件配置界面,双击FM355C模块,点击“parameter…”按钮,进入参数化界面,如图11-63所示。
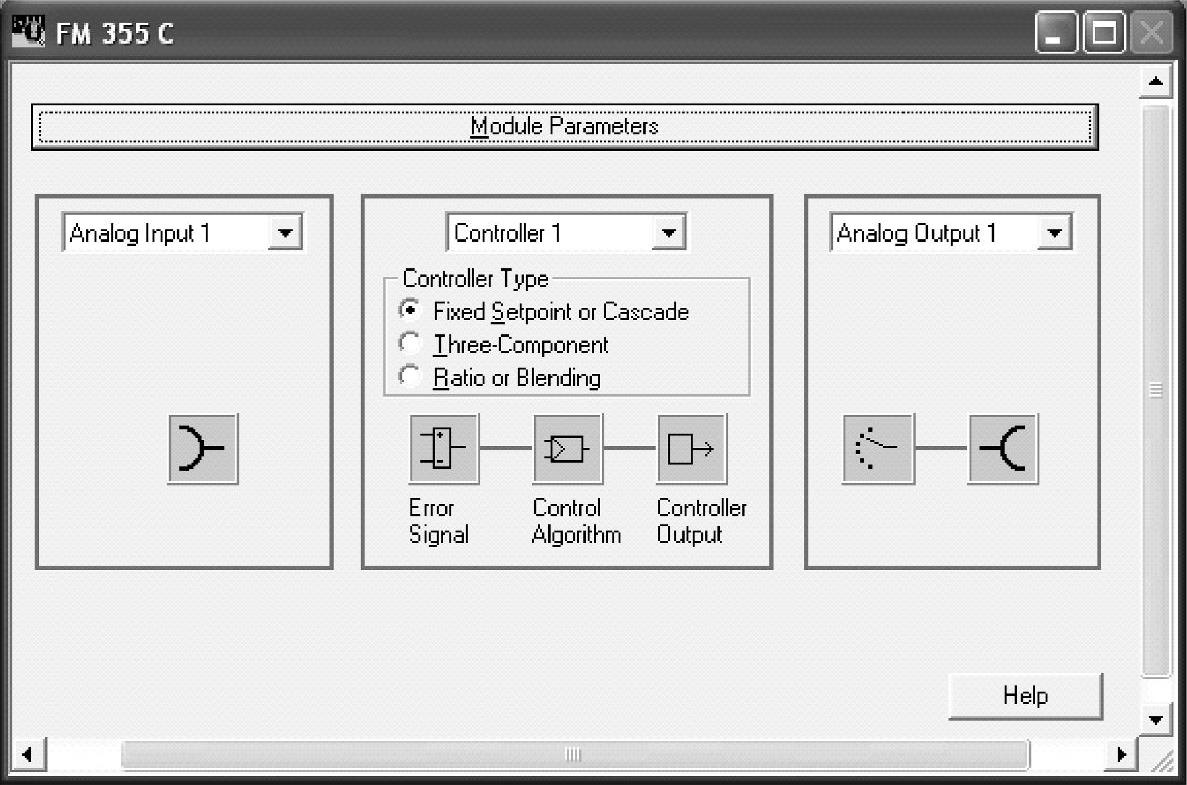
图11-63 FM355C模块参数化界面
在“Module Parameters”对话框中,可以对FM355C模块集成的数字量输入信号进行参数化,如选择信号为1的条件(高电平或低电平);也可以选择温度的单位、设定热电耦内部补偿的温度值等。从图11-63中可以看到一个PID控制回路,包括过程值采样回路、控制器回路和输出回路3个子回路,数据的流向也是从左向右经过过程值采样,然后与设定值相减算出偏差值,再经过PID运算,将计算结果通过输出信号传送到实际的控制器上。默认条件下相同序号的模拟量输入、控制器和模拟量输出为一个PID回路。
首先选择需要参数化的模拟量输入通道,然后点击按钮,进入参数化界面如图11-64所示。
图11-64中参数的功能如下:
“A/D”:选择模拟量数模转换的分辨率,分辨率高,则采样时间长;
“Sensor”:选择模拟量输入连接的传感器类型;
“Filter”:设定模拟量滤波时间,抑制高频信号对输入信号的干扰,默认状态为关;
“SquareRoot”:对输入信号开平方;
“Polyline”:对非线性的传感器信号进行线性差补,如在“Sensor”对话框中,选择“Free thermocouple type”类型传感器时,需要进行差补运算。选择确定类型的传感器已经对输入信号的特征曲线进行处理,不需要差补运算;
“Normalize”:对输入信号进行线性化。
如果使用外部温度补偿,则需要选择“Reference Input”;如果使用内部温度补偿,则需要选择“Parameters”。
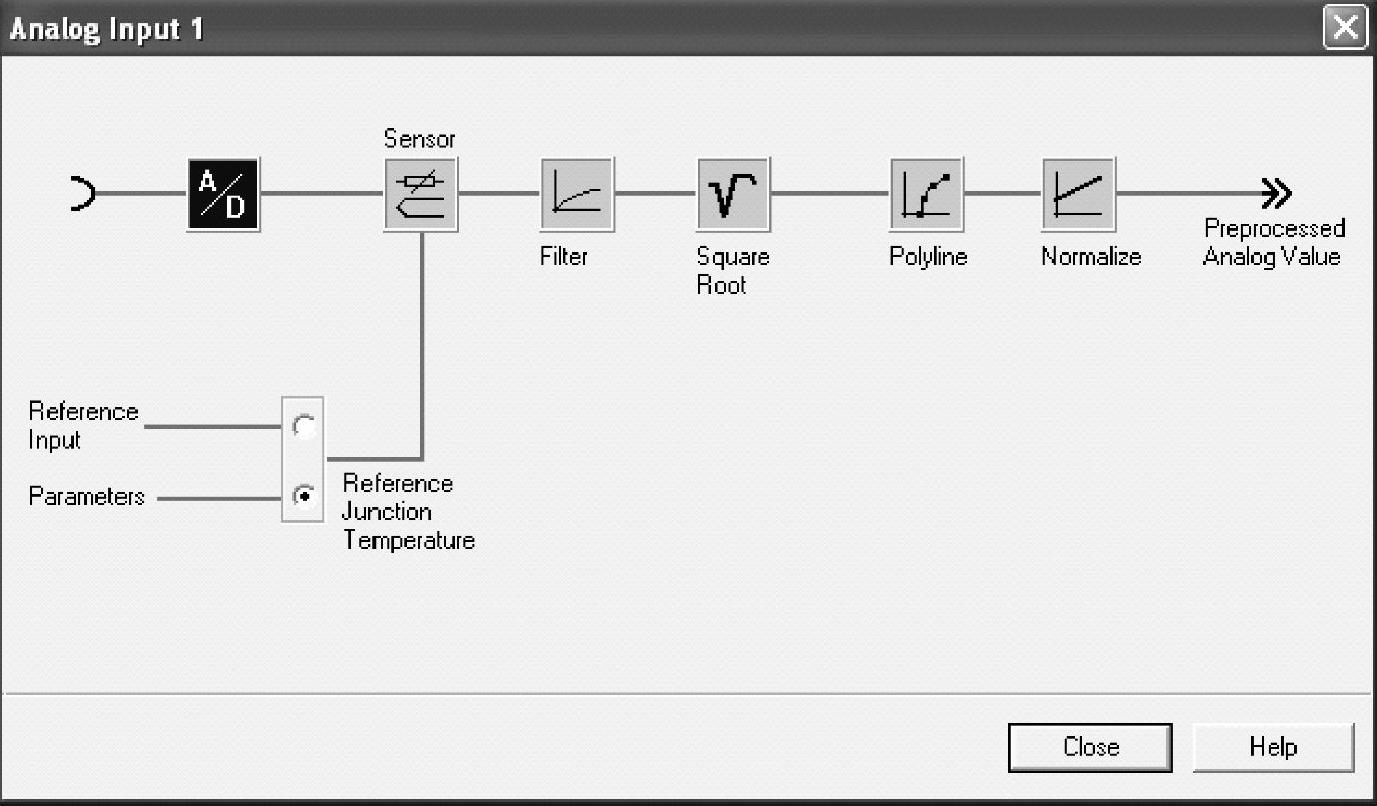
图11-64 FM355C模块过程值参数化界面
过程值信号参数化完成后进入控制器回路,选择需要配置的控制器通道和控制器类型,不同类型的控制器将影响设定和反馈的关系,即偏差的计算,如选择“Three-Component”类型控制器,最多可以将3个模拟量输入值叠加,作为一个PID回路的反馈值,默认值为具有固定设定点和串级功能的控制器,点击偏差按钮,进入参数化界面,如图11-65所示。
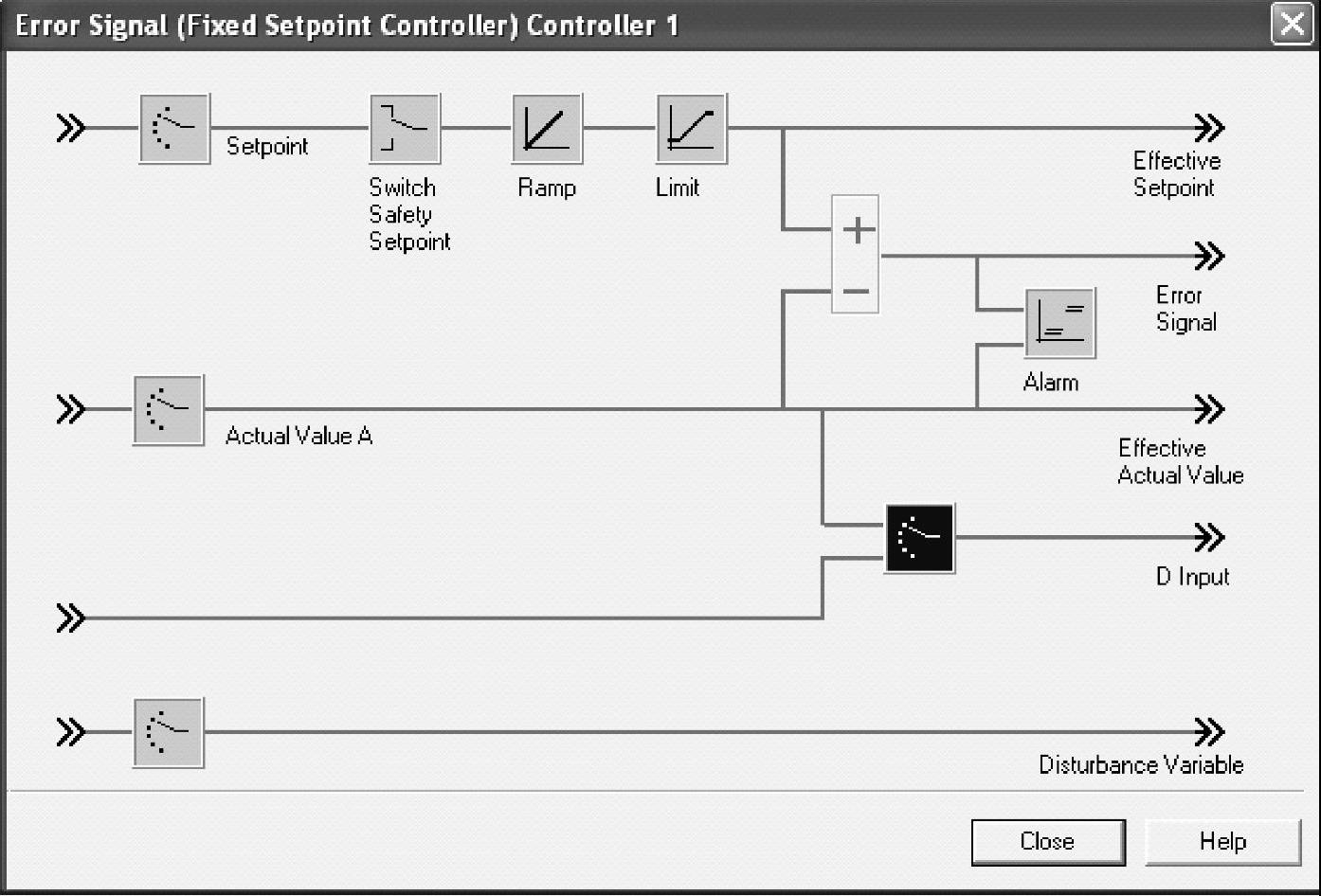
图11-65 FM355C模块偏差信号参数化界面
图11-65中参数的功能如下:
“Setpoint”:选择PID设定点的来源,3个选择:1)功能块;2)预处理的模拟量输入;3)控制器输出。设定点来自功能块为默认设置。
“Switch Safety Setpoint”:对后援操作(CPU处于停止状态)中设定点的设置;(https://www.xing528.com)
“Ramp”:对设定值进行斜坡处理,防止设定产生大的阶越,引起输出震荡;
“Limit”:对设定点进行线性化和限幅;
“Actual Value A”:选择过程值通道;
“D Input”:选择微分的方式:1)将偏差值进行微分;2)将过程值取反进行微分;3)将其他模拟量采集值进行微分,通过函数块FM_PID中D_EL_SEL参数(背景数据块地址为74)也可以在线修改;
“Alarm”:对实际值或偏差值进行监控,设定报警和警告值的高低限;
“Disturbance Variable”:选择扰动变量的采样通道,即通过第几个模拟量输入通道采集扰动变量。
设定值与实际值的差值为偏差值,在控制算法中对偏差值进行计算,点击“ControlAl-gorithm”按钮,进入控制算法界面,如图11-66所示。
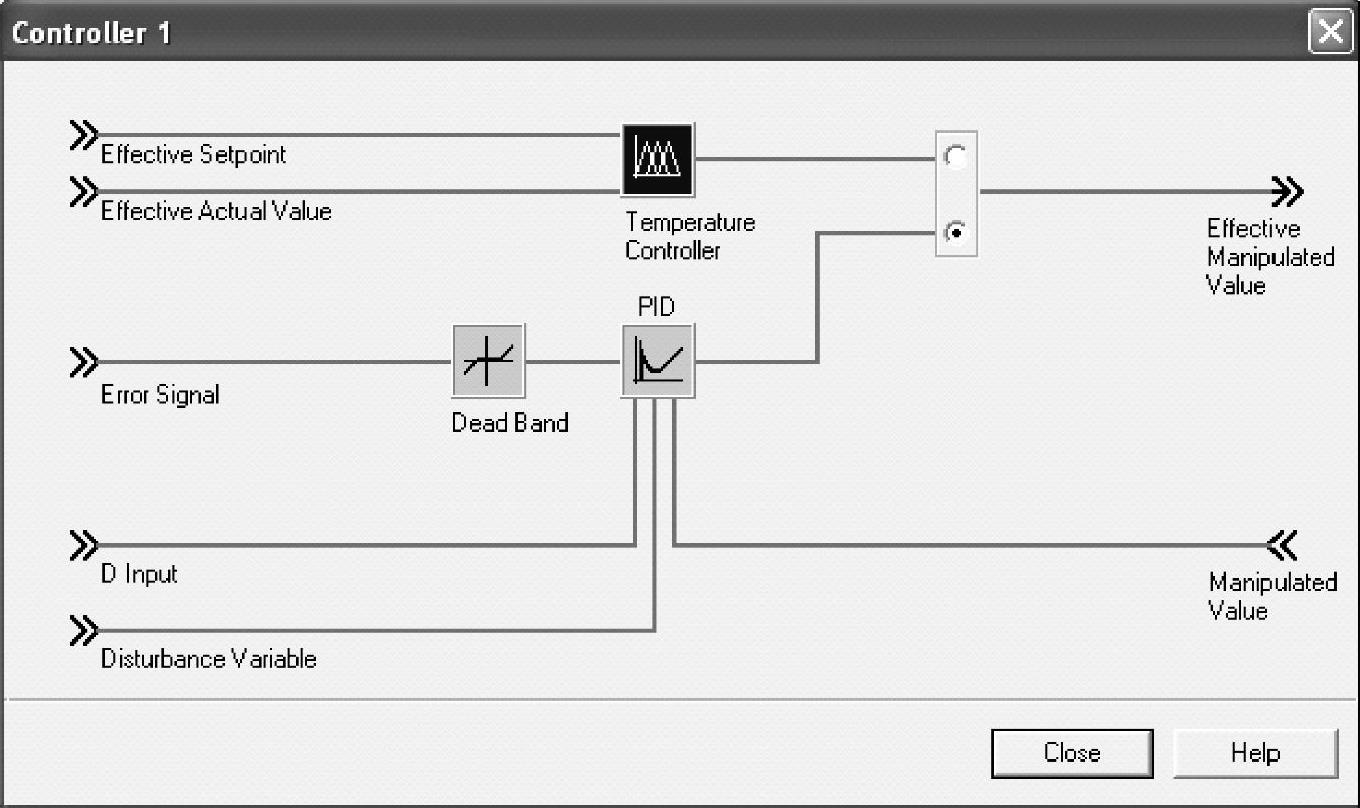
图11-66 FM355C模块控制算法参数化界面
在控制算法界面中,可以选择两种算法:1)温度算法;2)PID算法。在温度算法中,可以选择加热或制冷控制,温度算法中集成优化的温度控制,控制简单,只需在CPU中调用函数块对控制过程识别(自整定过程)一次即可使用,不需要温度控制的经验参数,但是温控算法没有开放,在有些情况下(如测温元件安装问题或控制器机械问题)模块往往不能识别控制过程而不能使用;采用PID算法,偏差值经过“Dead Band”死区处理后,进入PID控制器进行运算,在“PID”中可以选择的控制方式,如PI、PD、PID控制,并可以设定手自动无扰切换等参数。
点击“Controller Output”按钮,进入控制器回路输出界面,如图11-67所示。
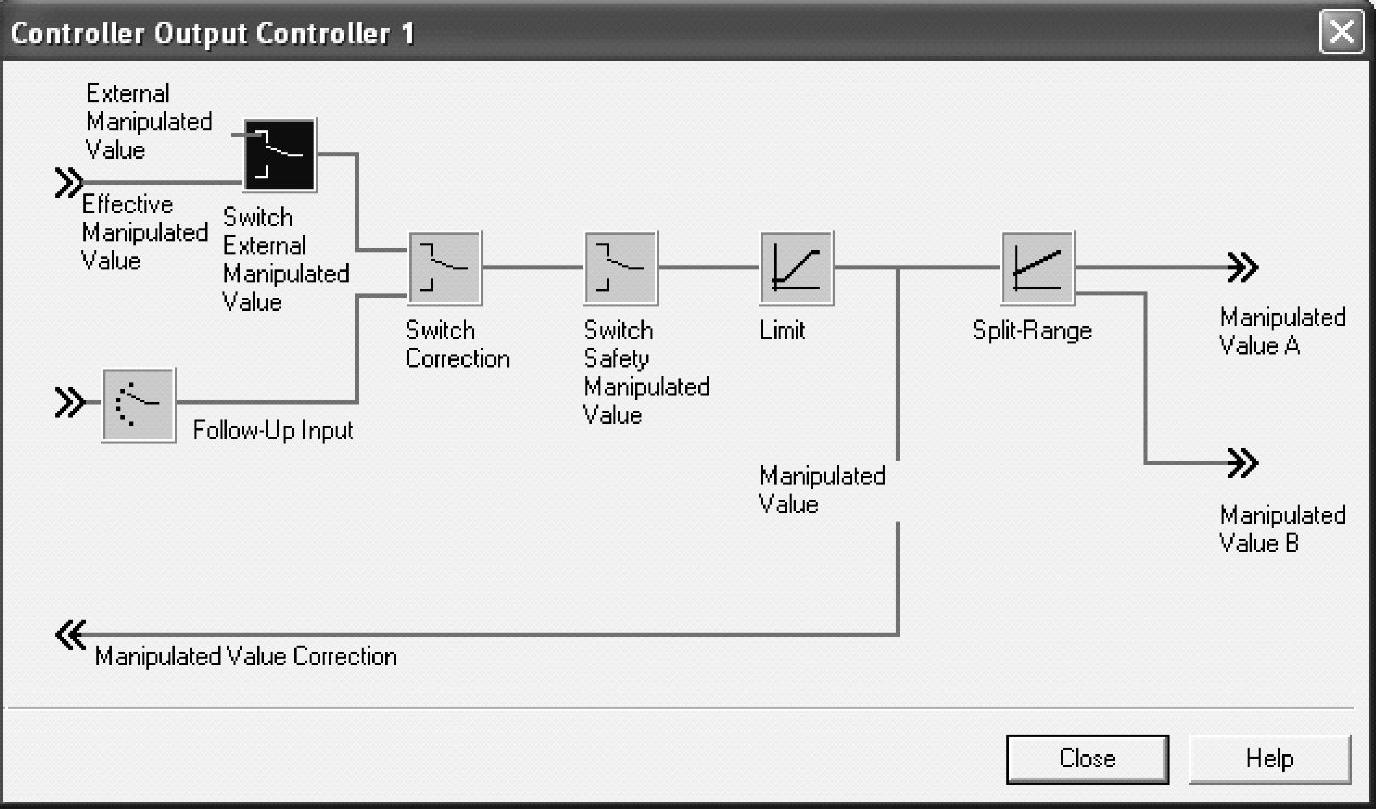
图11-67 FM355C模块控制回路输出参数化界面
图11-67中参数的功能如下:
“External Manipulated Value”:选择手-自动操作模式,手动操作时,需要在CPU中对输出赋值;
“Follow-Up Input”:跟随模式输入,选择零值或经过处理的模拟量输入直接作为控制器输出,防止手自动模式切换时输出产生阶越;
“Switch Correction”:可以通过程序或集成的数字输入信号,选择输出源;
“Switch Safety Manipulated Value”:可以通过程序或集成的数字输入信号,选择后援操作(CPU处于停止状态)的输出值;
“Limit”:对控制器输出值进行限幅;
“Split Range”:将一个控制器的输出值“LMN”经过“Split Range”功能的转换,按输入、输出范围分成两个输出值“LMN_A”和“LMN_B”,通常情况下“LMN_B”为反向过程控制。在选项中,输入的开始值必须小于结束值,相对应的输出值没有限制。
在输出回路中,为控制器输出选择对应的模拟量输出以及输出的类型。FM355C模块如果使用“Split Range”功能,可以将一个控制器的两个输出“LMN_A”和“LMN_B”连接到不同的模拟量输出通道(独立的控制回路数量减少);在FM355S中数字量的输出端口是固定的,不需要选择,例如第一个控制器输出固定对应模块集成的第一个和第二个数字量输出,依此类推,第四个控制器输出对应第七个和第八个数字量输出,以温度控制为例,第一个数字量输出控制加热过程,第二个数字量输出控制冷却过程。参数化完成后编译存盘。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。