



有些生产机械设备在加工零件时,要求在一定的范围内能自动往返运动,即当运动部件运行到一定位置时不用人工操作按钮就能自动返回,如果采用限位控制线路来控制会很麻烦,对于这种情况,可给电动机安装自动往返控制线路。
自动往返控制线路如图10-21所示。该线路采用了SQ1~SQ4四个行程开关,四个行程开关的安装位置如图10-22所示。SQ2、SQ1分别用来控制电动机正、反转,当运动部件运行到SQ2处时电动机由反转转为正转,运行到SQ1处时则由正转转为反转;SQ3、SQ4用作终端保护,它们只用到了常闭触头,当SQ1、SQ2失效时它们可以让电动机停转进行保护,防止运动部件行程超出范围而发生安全事故。
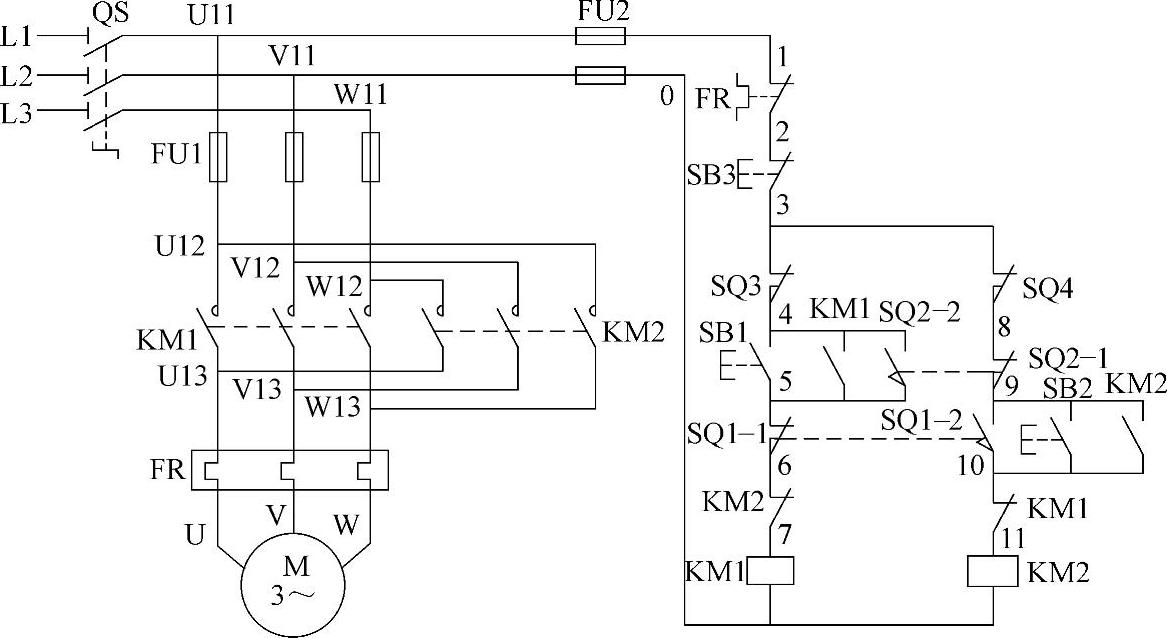
图10-21 自动往返控制线路
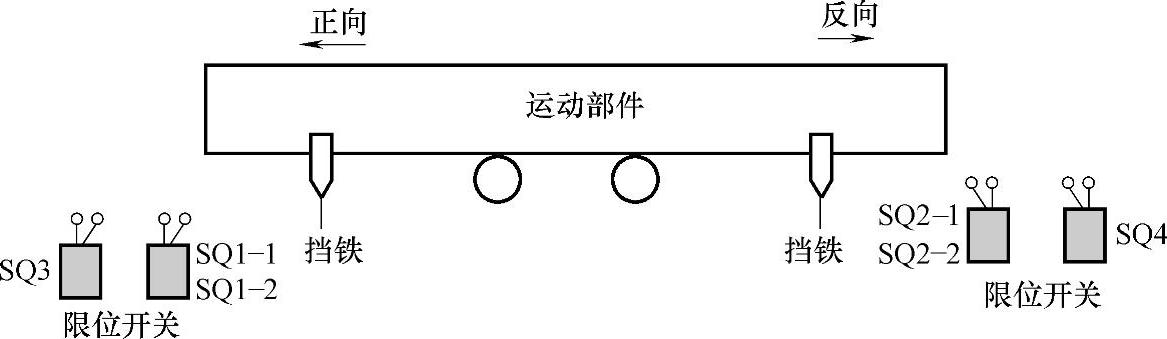
图10-22 自动往返控制线路四个行程开关的安装位置
线路工作原理分析如下:
1)闭合电源开关QS。(https://www.xing528.com)
2)往返运行控制。
①运转控制。若起动时运动部件处于反向位置,按下正转按钮SB1→KM1线圈得电→KM1主触头闭合、KM1常开辅助触头闭合、KM1常闭辅助触头断开→KM1主触头闭合,电动机通电正转,驱动运动部件正向运动;KM1常开辅助触头闭合,让KM1线圈在SB1断开时继续得电(自锁);KM1常闭辅助触头断开,使KM2线圈无法得电,实现KM1、KM2之间的联锁。
②方向转换控制。电动机正转带动运动部件运动并碰触行程开关SQ1→SQ1常闭触头SQ1-1断开、常开触头SQ1-2闭合→KM1线圈失电→KM1主触头断开、KM1常开辅助触头断开、KM1常闭辅助触头闭合→KM1主触头断开使电动机断电,KM1常开辅助触头断开撤销自锁,闭合的KM1常闭辅助触头与闭合的SQ1-2为KM2线圈供电→KM2主触头闭合,电动机通电反转,驱动运动部件反向运动;KM2常开辅助触头闭合,让KM2线圈在SB2断开时继续得电(自锁);KM2常闭辅助触头断开,使KM1线圈无法得电,实现KM2、KM1之间的联锁。
③终端保护控制。若行程开关SQ1失效→运动部件碰触SQ1时,常闭触头SQ1-1仍闭合、常开触头SQ1-2仍断开→电动机继续正转,带动运动部件碰触行程开关SQ3→SQ3常闭触头断开→KM1线圈供电切断→KM1主触头断开→电动机停转→运动部件停止运动。
若起动时运动部件处于正向位置,应按下反转按钮SB2,其工作原理与运动部件处于反向位置时按下正转按钮SB1相同,这里不再叙述。
3)停止控制。若需要停止运动部件的往返运行,可按下停止按钮SB3→KM1、KM2线圈供电均被切断→KM1、KM2主触头均断开→电动机断电停转→运动部件停止运行。
4)断开电源开关QS。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。