



前面已经为要进行运动仿真的零部件插入运动类型,建立了运动约束以及添加了相应的力和转矩,在运行仿真前要对机构进行一定的核查,以防止在仿真过程中出现不必要的错误。使用【动态运动】功能就是通过鼠标为运动部件添加驱动力驱动实体来测试机构的运动。可以利用鼠标左键选择运动部件,拖动此部件使其运动,查看运动情况是否与设计初衷相同,以及是否存在一些约束连接上的错误。鼠标左键选择运动部件上的点就是拖动时施力的着力点,拖动时,力的方向由零部件上的选择点和每一瞬间的光标位置之间的直线决定。力的大小根据这两点之间的距离系统会自己来计算,当然距离越大施加的力也越大。力在图形窗口中显示为一个黑色矢量,如图13-44所示。鼠标的操作产生了使实体移动的外力。当然这时对机构运动有影响的不只是添加的鼠标驱动力,系统也会将所有定义的动态作用如弹簧、连接、接触等考虑在内。【动态运动】功能是一种连续的仿真模式,但是它只是执行计算而不保存计算,而且对于运动仿真没有时间结束的限制。这也是它与【仿真播放器】进行的运动仿真的主要不同之处。
下面简单介绍一下动态零件运动的操控面板和操作步骤:
(1)单击【运动仿真】标签栏【结果】面板上的【动态运动】工具 ,在原来的【仿真播放器】位置打开如图13-45所示的【零件运动】操控面板。此时可以看到机构在已添加的力和约束下会运动。
,在原来的【仿真播放器】位置打开如图13-45所示的【零件运动】操控面板。此时可以看到机构在已添加的力和约束下会运动。
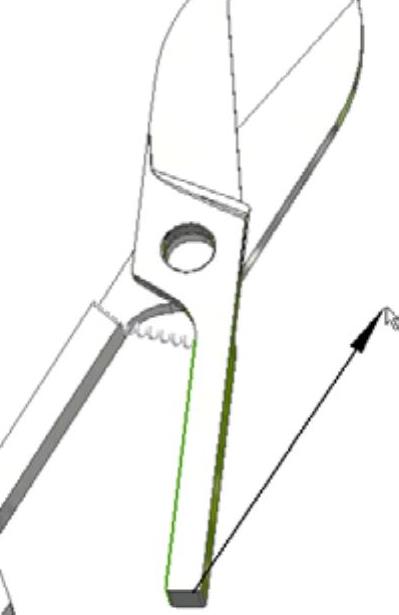
图13-44 施加力显示的箭头

图13-45 【零件运动】操控面板
(2)选择【暂停】按钮 ,可以停止由已经定义的动态参数产生的任何运动。点击完【暂停】
,可以停止由已经定义的动态参数产生的任何运动。点击完【暂停】 按钮后,【开始】按钮
按钮后,【开始】按钮 将代替【暂停】按钮。单击【开始】按钮后,将启动使用鼠标所施加的力产生的运动。
将代替【暂停】按钮。单击【开始】按钮后,将启动使用鼠标所施加的力产生的运动。
(3)在运动部件上,选择驱动力的着力点,同时按住鼠标左键并移动鼠标对部件施加驱动力。对零件施加的外力与零件上的点到鼠标光标位置之间的距离成正比,拖动方向为施加的力的方向。零件将根据此力移动,但只会以物理环境允许的方式移动。在移动过程中,参数项中【应用的力】显示框 将显示鼠标仿真力的大小,该字段的值会随着鼠标的每次移动而发生更改。而且只能通过在图形窗口中移动鼠标来更改此字段的值。
将显示鼠标仿真力的大小,该字段的值会随着鼠标的每次移动而发生更改。而且只能通过在图形窗口中移动鼠标来更改此字段的值。
当鼠标驱动力需要鼠标在很大位移才能驱动运动部件(或鼠标移动很小距离便产生很大的力)的时候,可以更改参数项中【放大鼠标移动的系数】 文本框中的值。这将增大或减小应用于零件上的点到光标位置之间距离的力的比例,比例系数增大的时候很小的鼠标位移可以产生很大的力,比例系数变小的时候相反。默认情况下,此因子值为0.01。
文本框中的值。这将增大或减小应用于零件上的点到光标位置之间距离的力的比例,比例系数增大的时候很小的鼠标位移可以产生很大的力,比例系数变小的时候相反。默认情况下,此因子值为0.01。
当需要限制驱动力的大小的时候可以选择更改参数项中【最大力】 文本框中应用的力的最大值。当设定最大力后,无论力的应用点到鼠标光标之间的距离多大,所施加的力最大只能为设定值。默认力的最大值为100N。(https://www.xing528.com)
文本框中应用的力的最大值。当设定最大力后,无论力的应用点到鼠标光标之间的距离多大,所施加的力最大只能为设定值。默认力的最大值为100N。(https://www.xing528.com)
下面介绍一下【零件运动】操控面板上的其他几个按钮:
(1)【抑制驱动条件】按钮 :此按钮可以在连接上的强制运动影响了零件的动作的时候停止此强制驱动造成的影响。默认情况下,强制运动在动态零件运动模式下不处于激活状态。此外,如果此连接上的强制运动受到了抑制,而要使此强制运动影响此零件的动作,选择【解除抑制驱动条件】
:此按钮可以在连接上的强制运动影响了零件的动作的时候停止此强制驱动造成的影响。默认情况下,强制运动在动态零件运动模式下不处于激活状态。此外,如果此连接上的强制运动受到了抑制,而要使此强制运动影响此零件的动作,选择【解除抑制驱动条件】 。
。
(2)阻尼类型:阻尼的大小对于机构的运动起到的影响不可小视,Inventor2012的【零件运动】提供了4种可添加给机构的阻尼类型:
●在计算时将机械装置阻尼考虑在内 。
。
●在计算时忽略阻尼 。
。
●在计算时考虑弱阻尼 。
。
●在计算时考虑强阻尼 。
。
(3)【将此位置记录为初始位置】按钮 :有时为了仿真的需要,要保存图形窗口中的位置,作为机构的初始位置。此时必须先停止仿真,选择【将此位置记录为初始位置】
:有时为了仿真的需要,要保存图形窗口中的位置,作为机构的初始位置。此时必须先停止仿真,选择【将此位置记录为初始位置】 。然后,系统会退出仿真模式返回构造模式,使机构位于新的初始位置。此功能对于找出机构的平衡位置非常有用。
。然后,系统会退出仿真模式返回构造模式,使机构位于新的初始位置。此功能对于找出机构的平衡位置非常有用。
(4)【重新启动仿真】按钮 :当需要使机构回到仿真开始时的位置并重新启动计算时,可以选择【重新启动模拟】按钮
:当需要使机构回到仿真开始时的位置并重新启动计算时,可以选择【重新启动模拟】按钮 。此时会保留先前使用的选项如阻尼等。
。此时会保留先前使用的选项如阻尼等。
(5)【退出零件运动】按钮 :在完成了【零件运动】模拟后,选择【退出零件运动】
:在完成了【零件运动】模拟后,选择【退出零件运动】 按钮可以返回构造环境。
按钮可以返回构造环境。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。