



在被控过程中,实现完全分布和完全集成的应用已经层出不穷。现代的高密度纳米科技计算机芯片或是现代汽车都是这个趋势的良好例证。
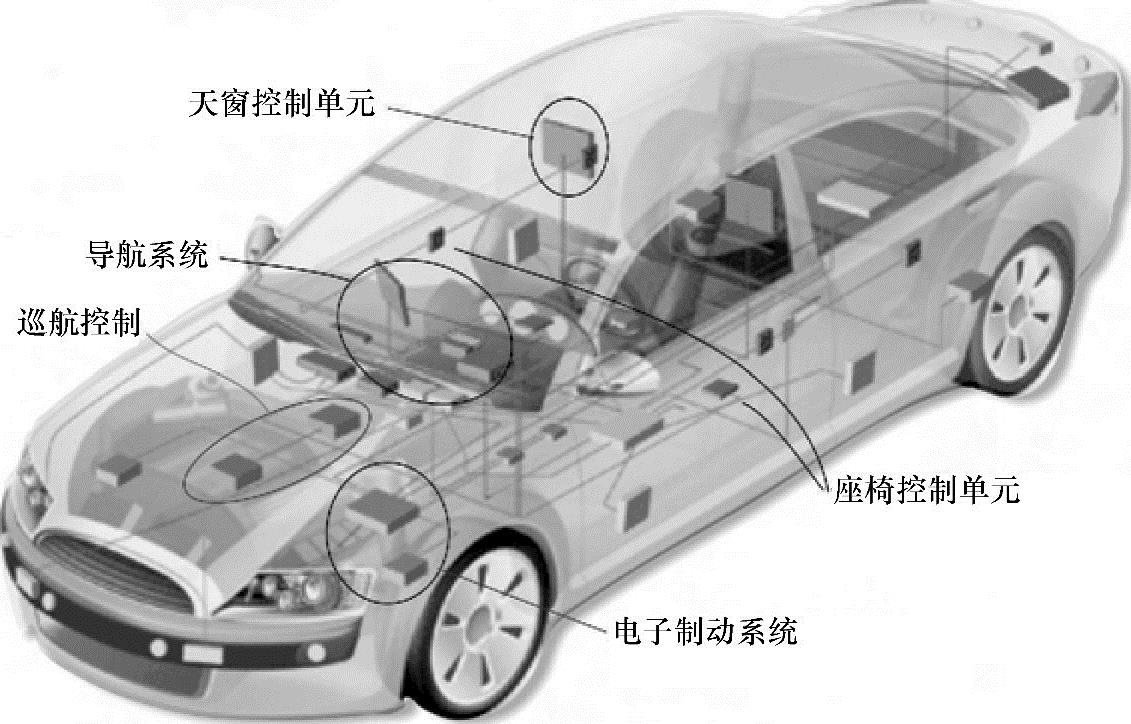
图12-1 带有分布式传感器的汽车
如图12-1所示,汽车具有的基本控制系统包括:伺服制动(甚至导线制动)、计算机辅助驾驶、牵引力控制系统、主动制导悬挂系统、局部气候控制、声音控制和声音均等化、对环境亮度反应的汽车照明、对环境条件反应的挡风玻璃刷、引擎控制、燃料效率和污染控制系统以及巡航控制,有些车还有防撞装置和自动停车的功能。在有些城市,通过交通网络和全球定位系统(GPS)的汽车通信协调工作,防止路上拥堵并提供最短时间抵达目的地的行车路径。
这样,你的车还怎么会不把你从公司带回家里呢?
在车里,控制、计算机和通信网络的基础设施有很多。单纯地从燃料效率的角度来看(更少的电线=更轻的重量=更高燃料效率),建立内部无线网络比有线网络更切实可行。
甚至手机也是一个相当了不起的计算机系统,在控制背景下它拥有巨大的潜力。例如,追踪所有手机或所有全球定位系统的信息,将这些信息连入交通网络信息系统,就可以提供驾驶时间、最佳路径的信息,事实上这就形成了一个可以调节交通信号灯,提供个人路径建议,实时改变限速(还有通过与引擎控制单元通信施加可变速度限制或基于全局建议是否采纳来调整过路费的潜力),甚至可以在紧急情况下调节车流数量。利用这样的技术,人们可以基于位置信息和驾驶习惯来设计过路费用户付费系统,在围绕空间使能服务开发的空间信息科学将会有一整套全新的规则。
在这样的大规模应用中,约束也是设计的重要部分。一些新的设计问题也不断出现,怎样在传感器、执行器、通信和计算之间利用和分配可利用的能量?管理整个城市的交通网络需要多少能源?基于反馈的自动交通网络与目前基于政策的开环管理网络相比,其能源效率能提高多少?嵌入式控制系统设计需要考虑如下问题:
1)整个系统会在许多不同的模式下运行,各种各样的子系统需要满足各自不同的局部任务,并且有些局部任务是相互冲突的。全局最优对局部最优和局部均衡(在局部层面以竞争的观点,公平的获取信息和其他资源)的概念需要考虑。(https://www.xing528.com)
2)通信网络必须处理很多协议和数据,而且网络管理也是整个系统管理中的一个子任务,通信必须可以被打断和复原。网络拓扑结构是具体问题具体分析的。
3)系统的有些部分可能出现故障,但功能性一定能够保证,即使会牺牲一些好的性能。
4)可用电力和资源调度。
5)多任务分享资源,允许一些任务的优先权和再次确定优先权,可以平等获取资源。(适合目标,或最大化收益)。
6)适应和学习的潜能很大。
7)保持可靠性和安全性,当问题出现或可能出现时报警。
8)为了实现目标,系统允许缓慢地扩张甚至收缩。
对于所有大规模控制系统来说,重要的是系统和人类社会如何进行交互?人类接口是什么?我们与这项技术会有怎样的相互影响?关于隐私和个人安全的问题,个人权利和期望与社会权利和期望间的潜在冲突必须全面考虑。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。