



【摘要】:在一般环境下这样的即插即用控制器很难出现,但在充分约束的环境下,学习控制就是可行的。学习是自适应的高级形式,自适应控制的思想就是大多数自学习控制系统的核心。根据这些模块的输出,决策系统将决定采用哪个控制器是最合适的,管理系统则实现从当前控制器到最新选择控制器之间的转换。学习控制非常适用于控制含有重复操作的过程。这个控制策略命名为重复学习控制。图10-12 循环自学习系统
理想的即插即用控制器会根据过去的经验来学习应该做什么。在一般环境下这样的即插即用控制器很难出现,但在充分约束的环境下,学习控制就是可行的。学习是自适应的高级形式,自适应控制的思想就是大多数自学习控制系统的核心。
学习控制器结构如图10-11所示。
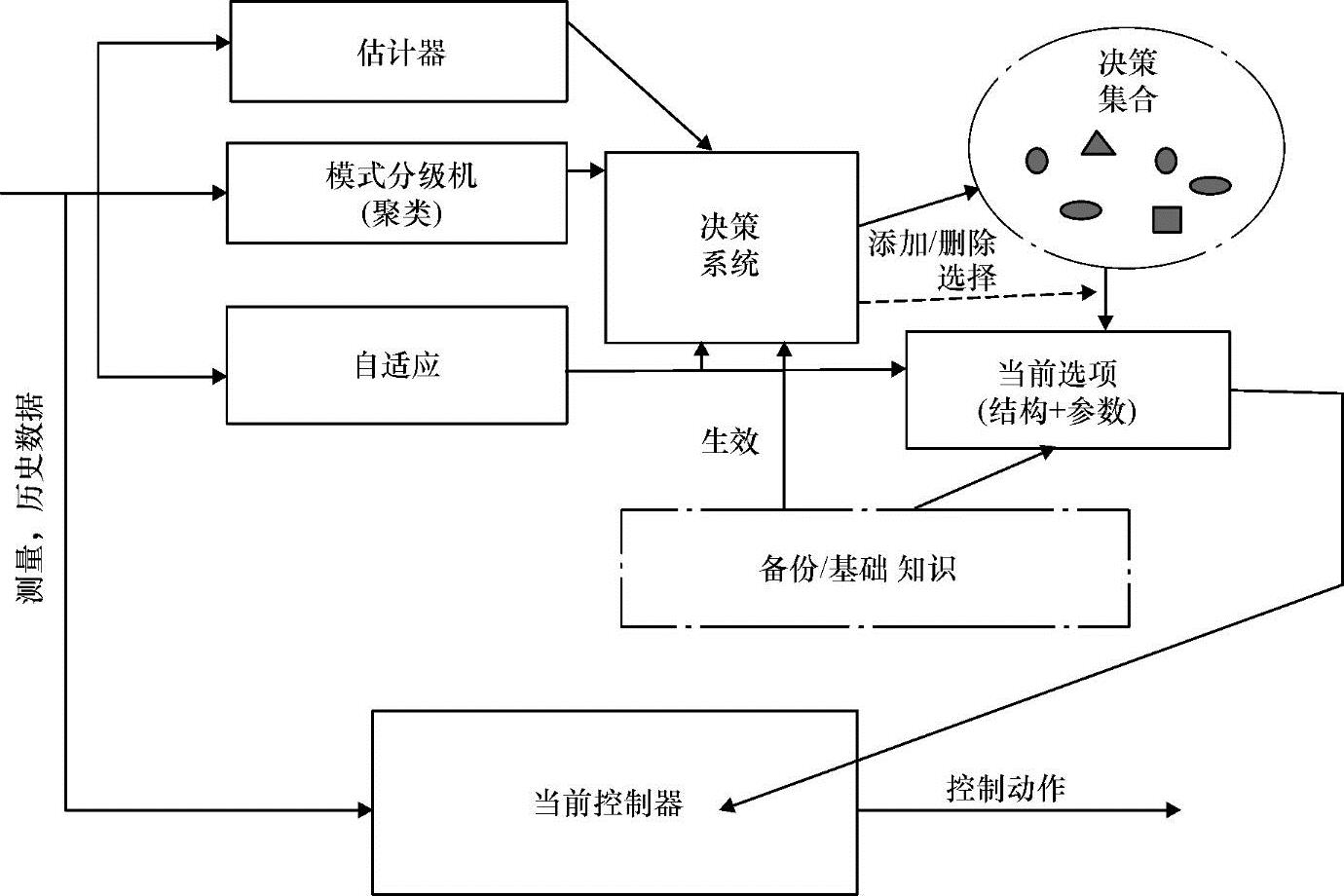
图10-11 即插即用控制:从零开始
首先设计一组控制器,其中一般都包含一个安全控制器(防止其他控制器都失效)。来自被控对象的信息通过当前控制器处理,决定被控对象当前的输入量;也可以通过自适应模块进行处理,调节控制器参数来保证系统性能;估算模块,计算当前控制器的适当程度;聚类模块,识别不同的运行模式。根据这些模块的输出,决策系统将决定采用哪个控制器是最合适的,管理系统则实现从当前控制器到最新选择控制器之间的转换。(https://www.xing528.com)
学习控制非常适用于控制含有重复操作的过程。这在许多机器人应用中很常见。比如,焊接机器人必须跟踪一个预设的轨迹来焊接车辆底盘零件。对每个底盘来说该动作都是重复的。相似的机械手集齐部件并将它们按特定次序摆放,反复进行。当这个过程重复的时候,从过去的循环中学习使下一次循环提升也是可行的。每一次循环,控制动作都可以提升性能,即机器人学会怎样执行所需的操作。如图10-12所示。这个控制策略命名为重复学习控制。
实际控制动作包含两个部分:一个是通过学习过程不断完善的开环控制或是前馈控制,另外一个是用来处理干扰以及不可学习的、突变过程的反馈控制,如图10-12所示。
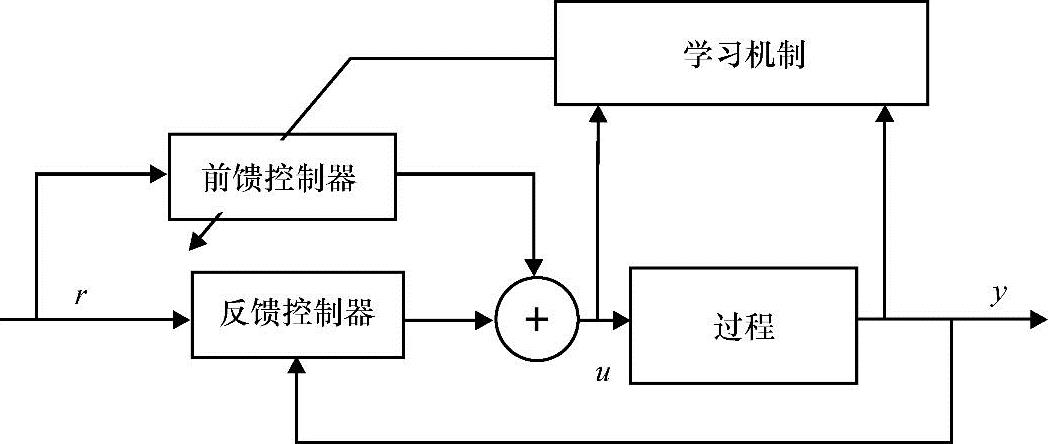
图10-12 循环自学习系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。