



基于微处理器的控制器只能处理数字量,基本的数字控制回路如图9-9所示。最常见的控制算法、PID,经常通过数字控制实现。主要区别在进出控制器的信号是经过采样获得的。最常用的采样技术是周期性采样,就是在相等的时间点上控制器接收和发出信号。
在采样周期内,控制输出同样也是执行器的输入保持不变。所以对象在采样周期内等效成开环控制。假设与动态响应速度(考虑奈奎斯特采样准则)相比采样周期很短,采样数据控制和模拟控制的区别就很小。当然,采样时间也必须足够大,以便完成决定控制量所需的计算。当前,只有难度很大的控制环境才需要特殊目的的硬件设计,因为计算与传感器和执行器相比十分便宜。控制里的(资源)限制并不是由控制计算机产生的。
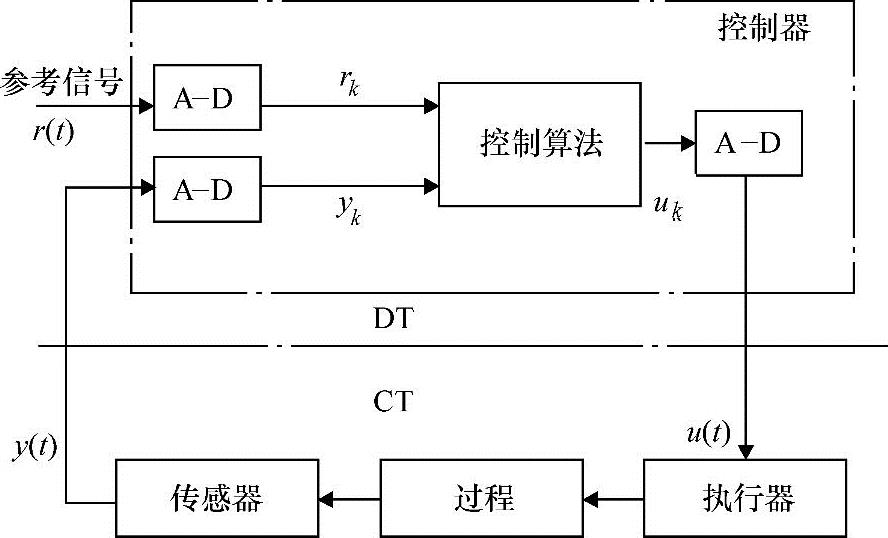
图9-9 基本数字控制回路
然而,数字控制并不是模拟控制,计算能力也是有限的。更重要的是,计算机算法本质上是顺序处理的。所以当很多控制回路共享计算机硬件时,必须保证所有控制任务都能在平等的基础上完成。平等是从系统性能的角度上来说的。有一些特殊的操作系统,时间起直接作用(称为实时操作系统),目前正在不断解决这些难题。
下面就是一些区分计算机中模拟实时环境和顺序编程环境的要素。这些要素在共享通信网络中实现控制数据通信时变得很重要。
●检测、通信和计算会有延时。延时会影响系统性能。
●采样时间是在两个控制更新之间的时间,大体上随必需资源的可利用性而定。采样成为一个事件而不是一个周期性现象。
●信号时序会受影响。所有信号的时间戳是必不可少的,需要全网络范围的时钟同步。
●有些测量会丢失或是延时。
●因为通信或是计算误差,新的失效模式也会出现。(https://www.xing528.com)
●因为计算机硬件复杂性,控制算法的验证和认证也变得更加复杂。
●局域控制会与其他任务纠缠在一起,比如监管、协调、警报监视、警报反应。为了保证性能,必须建立资源分配和资源保障。
在这样的设置下,控制规律可以在软件里实现。通常,控制代码仅仅是支持设备运行的一大部分代码里很小的一部分,优势是计算机环境所提供的灵活性,可以实现更具挑战性的控制思想。它的劣势是控制从根本上改变了系统的行为,因此保证系统性能通常是非常重要的。环境越复杂,任务越困难。没人能接受自动驾驶系统这样通知我们:对不起,计算机暂时失去驾驶能力,请等待系统重启。
(1)离散化和量子化
过程中的模拟信号必须经采样之后,才能进入基于计算机的控制器里进行处理。参见4.4.2节。时间和信号数值的精确性给控制的执行带来限制。
(2)控制和执行的协同设计
传统上,控制和计算领域的发展没有太多交集。然而,处理控制时间时极其关键的。基于计算机的系统必须实时反应:使用过时的控制量最好情况下是没有用处,最坏的时候是灾难性的。
因此,现在的趋势是同时考虑控制需求和计算与通信资源的可利用性,可以参考第8.7节关于通信、计算、控制的讨论。系统性能才是最关键的,协同设计都是自动完成的,正如在飞行控制设计中实现的一样。被控系统的大脑
基于计算机的控制器决定了被控过程的输入。
计算机和人脑在很多方面上都有不同。计算机缺乏创造性、推理能力、活泼个性、性格,但在控制领域中这些缺点反而成了很重要的优势,因为它们意味着可重复性,提高了可靠性又保证了可验证性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。