



【摘要】:软测量或是虚拟传感器是以能观性的概念为基础,利用滤波理论获得的。卡尔曼滤波器:目前,在软测量或是虚拟传感器中最成功的案例称为卡尔曼滤波器[4]。自从卡尔曼在1960年写下他开创性的论文之后,卡尔曼滤波器在控制和信号领域内广泛应用起来。卡尔曼滤波器的极大成功应该归功于对模型的需求小。
在某些情况下,需要的变量并不能通过硬件传感器直接测量,可以通过动态特性和其他可以通过硬件传感器测量的信号推测出来。这就是所谓的软测量或称虚拟传感器。
如图9-5所示说明了这样的概念:通过采集被控过程或过程模型的信息(包括操作变量输入和干扰),可以估计部分或所有的内部变量。
软测量或是虚拟传感器是以能观性的概念为基础,利用滤波理论获得的。能观性是指利用对过程模型的知识和对系统外部信号(例如输入输出信号)的简单测量,重建系统状态的可能性。这是系统理论中一个重要概念。可观测性是系统理论的关键概念之一,因为几乎所有的系统(线性和非线性)都具有这一性质,并且能观性也有不同程度:有些变量要比其他变量更容易观测。
卡尔曼滤波器:
目前,在软测量或是虚拟传感器中最成功的案例称为卡尔曼滤波器[4]。自从卡尔曼在1960年写下他开创性的论文之后,卡尔曼滤波器在控制和信号领域内广泛应用起来。
卡尔曼滤波器或其改进版本可以估计模型全部状态,需要满足:
●被控过程动态特性模型,尤其是包含输入如何作用于状态、状态如何与输出联系的状态描述。模型不必精确,对模型误差的估计是必要的。
●测量系统的模型,尤其是测量误差统计特性模型。(https://www.xing528.com)
●被测量的输出信号有足够信息(能观性必须成立)。
●所有输入输出信号必须可测。
●对状态的合理初始假设。
卡尔曼滤波器的极大成功应该归功于对模型的需求小。简单合理的模型,或许加模型误差的估计就已经足够了。当然模型越准确,我们从虚拟传感器中得到的就越多。
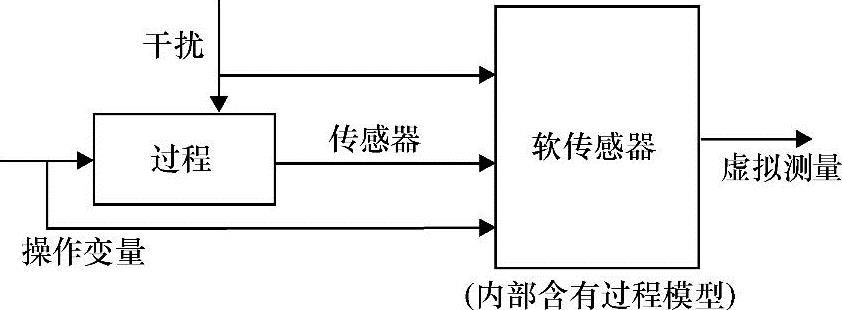
图9-5 基于信息处理的虚拟传感器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。