



正如前面所提到的,反馈控制的一个基本特征就是反应:首先检测到一个误差,然后反应紧跟其后。
在很多系统中,只要没有使用纠正措施,初始的误差响应与后来的误差响应方向是一致的。不幸的是有些系统并非如此,最初的响应与最终响应的方向常常是相反的。
例如,对于带有纯时间滞后的系统,在初始阶段没有任何的响应。
对于非最小相位过程[2],在这些情况下,初始响应将会误导反馈控制器。事实上,由于在实际控制过程中存在诸多的固有限制,不管我们怎样努力,这些系统都难以控制。
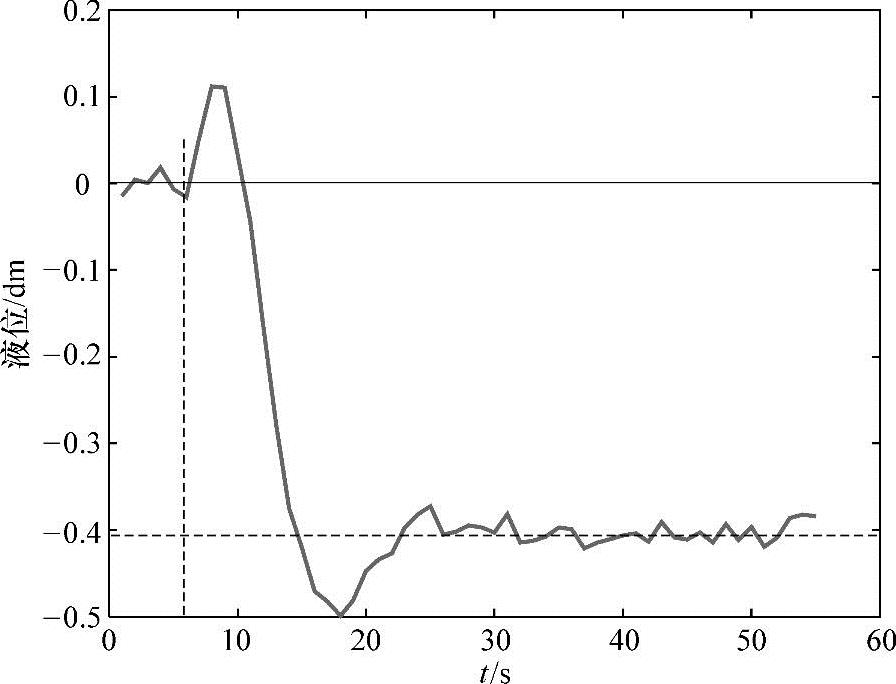
有关非最小相位系统典型的例子是锅炉水位控制。显然为了保持水位在给定参考点,如果液位低于参考点,入水口流量就要增大。在正常操作模式下,当出口蒸汽流量增加时,锅炉压力减小。因此,有更多的水沸腾并在水中产生更多的气泡,这将会有增大锅炉表面水容量的效果。液位传感器观测到液位的增加,随后减小入水口流量,实际上需要相反地操作。一个典型的响应如图8-11所示。蒸汽出口流量在t=6s时增加,导致最后液位降低了4cm左右,但是在前2s中,液位实际上增加了超过1cm。一个类似的问题发生在增加入水流量时,当这种相对冷的水进入锅炉后会使锅炉内水温降低,导致气泡消失并且液位下降。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-11 蒸汽出口流量增加时沸水液位响应
对于这类系统前馈控制可能是有帮助的。例如,在先前的例子中,如果安装一个蒸汽流量计,液位控制器将能够提前知道蒸汽流量的变化(由于手动阀门MV的变化),并且(作用到自动阀门AV)调节入水流量,预先对水位误差响应。测量到的蒸汽流量变化将会被引入作为水流参考值的变化量。然而,由于蒸汽与水流常常存在不同的动态,最后还需要一个更慢的反馈补偿。典型的控制结构图如图8-12所示。
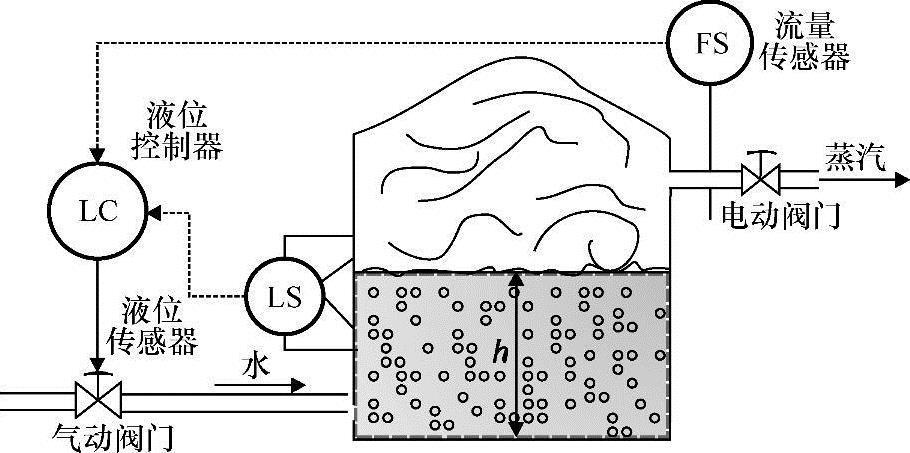
图8-12 有蒸汽流量负载扰动时沸水液位控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。